The absence of an effective gripping force feedback mechanism in minimally invasive surgical robot systems impedes physicians' ability to accurately perceive the force between surgical instruments and human tissues during surgery, thereby increasing surgical risks. To address the challenge of integrating force sensors on minimally invasive surgical tools in existing systems, a clamping force prediction method based on mechanical clamp blade motion parameters is proposed. The interrelation between clamping force, displacement, compression speed, and the contact area of the clamp blade indenter was analyzed through compression experiments conducted on isolated pig kidney tissue. Subsequently, a prediction model was developed using a backpropagation (BP) neural network optimized by the Sparrow Search Algorithm (SSA). This model enables real-time prediction of clamping force, facilitating more accurate estimation of forces between instruments and tissues during surgery. The results indicate that the SSA-optimized model outperforms traditional BP networks and genetic algorithm-optimized (GA) BP models in terms of both accuracy and convergence speed. This study not only provides technical support for enhancing surgical safety and efficiency, but also offers a novel research direction for the design of force feedback systems in minimally invasive surgical robots in the future.
Citation: Yongli Yan, Tiansheng Sun, Teng Ren, Li Ding. Enhanced grip force estimation in robotic surgery: A sparrow search algorithm-optimized backpropagation neural network approach[J]. Mathematical Biosciences and Engineering, 2024, 21(3): 3519-3539. doi: 10.3934/mbe.2024155
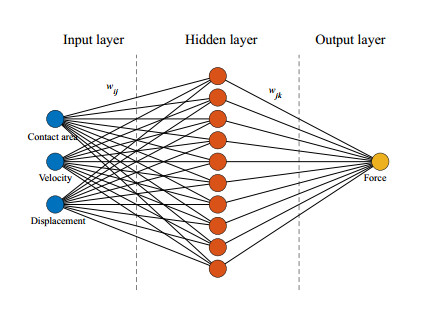
The absence of an effective gripping force feedback mechanism in minimally invasive surgical robot systems impedes physicians' ability to accurately perceive the force between surgical instruments and human tissues during surgery, thereby increasing surgical risks. To address the challenge of integrating force sensors on minimally invasive surgical tools in existing systems, a clamping force prediction method based on mechanical clamp blade motion parameters is proposed. The interrelation between clamping force, displacement, compression speed, and the contact area of the clamp blade indenter was analyzed through compression experiments conducted on isolated pig kidney tissue. Subsequently, a prediction model was developed using a backpropagation (BP) neural network optimized by the Sparrow Search Algorithm (SSA). This model enables real-time prediction of clamping force, facilitating more accurate estimation of forces between instruments and tissues during surgery. The results indicate that the SSA-optimized model outperforms traditional BP networks and genetic algorithm-optimized (GA) BP models in terms of both accuracy and convergence speed. This study not only provides technical support for enhancing surgical safety and efficiency, but also offers a novel research direction for the design of force feedback systems in minimally invasive surgical robots in the future.

| [1] |
J. H. Palep, Robotic assisted minimally invasive surgery, J. Minimal Access Surg., 5 (2009), 1. https://doi.org/10.4103/0972-9941.51313 doi: 10.4103/0972-9941.51313

|
| [2] | E. B. Wilson, H. Bagshahi, V. D. Woodruff, Overview of general advantages, limitations, and strategies, in Robotics in General Surgery, Springer, (2013), 17–22. https://doi.org/10.1007/978-1-4614-8739-5_3 |
| [3] |
S. C. Lim, H. K. Lee, J. Park, Role of combined tactile and kinesthetic feedback in minimally invasive surgery, Int. J. Med. Rob. Comput. Assisted Surg., 11 (2015), 360–374. https://doi.org/10.1002/rcs.1625 doi: 10.1002/rcs.1625
|
| [4] |
A. M. Okamura, Haptic feedback in robot-assisted minimally invasive surgery, Curr. Opin. Urol., 19 (2009), 102. https://doi.org/10.1097/MOU.0b013e32831a478c doi: 10.1097/MOU.0b013e32831a478c
|
| [5] |
A. Arshad, M. M. Saleem, M. I. Tiwana, H. ur Rahman, S. Iqbal, R. Cheung, A high sensitivity and multi-axis fringing electric field based capacitive tactile force sensor for robot assisted surgery, Sens. Actuators, A, 354 (2023), 114272. https://doi.org/10.1016/j.sna.2023.114272 doi: 10.1016/j.sna.2023.114272
|
| [6] |
A. Talasaz, R. V. Patel, Integration of force reflection with tactile sensing for minimally invasive robotics-assisted tumor localization, IEEE Trans. Haptic, 6 (2012), 217–228. https://doi.org/10.1109/ToH.2012.64 doi: 10.1109/ToH.2012.64
|
| [7] |
M. Moradi Dalvand, B. Shirinzadeh, S. Nahavandi, J. Smith, Effects of realistic force feedback in a robotic assisted minimally invasive surgery system, Minimally Invasive Ther. Allied Technol., 23 (2014), 127–135. https://doi.org/10.3109/13645706.2013.867886 doi: 10.3109/13645706.2013.867886
|
| [8] | C. R. Wagner, R. D. Howe, N. Stylopoulos, The role of force feedback in surgery: analysis of blunt dissection, in Haptic Interfaces for Virtual Environment and Teleoperator Systems, International Symposium on, IEEE Computer Society, (2002), 73. |
| [9] | W. Semere, M. Kitagawa, A. M. Okamura, Teleoperation with sensor/actuator asymmetry: Task performance with partial force feedback, in 12th International Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems, IEEE, (2004), 121–127. |
| [10] |
Y. Fu, K. Li, B. Pan, J. Zhan, S. Wang, A survey of force sensing and force feedback technology for robot-assisted minimally invasive surgical system, Robot, 36 (2014), 117–128. https://doi.org/10.3724/SP.J.1218.2014.00117 doi: 10.3724/SP.J.1218.2014.00117
|
| [11] |
A. A. Nazari, F. Janabi-Sharifi, K. Zareinia, Image-based force estimation in medical applications: A review, IEEE Sens. J., 21 (2021), 8805–8830. https://doi.org/10.1109/JSEN.2021.3052755 doi: 10.1109/JSEN.2021.3052755
|
| [12] |
M. Allan, S. Ourselin, D. J. Hawkes, J. D. Kelly, D. Stoyanov, 3D pose estimation of articulated instruments in robotic minimally invasive surgery, IEEE Trans. Med. Imaging, 37 (2018), 1204–1213. https://doi.org/10.1109/TMI.2018.2794439 doi: 10.1109/TMI.2018.2794439
|
| [13] |
R. Xue, B. Ren, J. Huang, Z. Yan, Z. Du, Design and evaluation of FBG-based tension sensor in laparoscope surgical robots, Sensors, 18 (2018), 2067. https://doi.org/10.3390/s18072067 doi: 10.3390/s18072067
|
| [14] |
A. Abiri, S. J. Askari, A. Tao, Y. Y. Juo, Y. Dai, J. Pensa, et al., Suture breakage warning system for robotic surgery, IEEE Trans. Biomed. Eng., 66 (2018), 1165–1171. https://doi.org/10.1109/TBME.2018.2869417 doi: 10.1109/TBME.2018.2869417
|
| [15] |
C. E. Reiley, T. Akinbiyi, D. Burschka, D. C. Chang, A. M. Okamura, D. D. Yuh, Effects of visual force feedback on robot-assisted surgical task performance, J. Thoracic Cardiovasc. Surg., 135 (2008), 196–202. https://doi.org/10.1016/j.jtcvs.2007.08.043 doi: 10.1016/j.jtcvs.2007.08.043
|
| [16] |
S. Zou, B. Pan, Y. Fu, S. Guo, Improving backdrivability in preoperative manual manipulability of minimally invasive surgery robot, Ind. Robot, 45 (2018), 127–140. https://doi.org/10.1108/IR-02-2017-0031 doi: 10.1108/IR-02-2017-0031
|
| [17] |
B. Zhao, C. A. Nelson, Estimating tool–tissue forces using a 3-degree-of-freedom robotic surgical tool, J. Mech. Rob., 8 (2016), 051015. https://doi.org/10.1115/1.4032591 doi: 10.1115/1.4032591
|
| [18] |
T. K. Stephens, J. J. O'Neill, N. J. Kong, M. V. Mazzeo, J. E. Norfleet, R. M. Sweet, et al., Conditions for reliable grip force and jaw angle estimation of da Vinci surgical tools, Int. J. Comput. Assisted Radiol. Surg., 14 (2019), 117–127. https://doi.org/10.1007/s11548-018-1866-8 doi: 10.1007/s11548-018-1866-8
|
| [19] |
P. S. Zarrin, A. Escoto, R. Xu, R. V. Patel, M. D. Naish, A. L. Trejos, Development of a 2-DOF sensorized surgical grasper for grasping and axial force measurements, IEEE Sens. J., 18 (2018), 2816–2826. https://doi.org/10.1109/JSEN.2018.2805327 doi: 10.1109/JSEN.2018.2805327
|
| [20] |
B. Carotenuto, A. Ricciardi, A. Micco, E. Amorizzo, M. Mercieri, A. Cutolo, et al., Optical fiber technology enables smart needles for epidurals: an in-vivo swine study, Biomed. Opt. Express, 10 (2019), 1351–1364. https://doi.org/10.1364/BOE.10.001351 doi: 10.1364/BOE.10.001351
|
| [21] |
M. Haghighipanah, M. Miyasaka, B. Hannaford, Utilizing elasticity of cable-driven surgical robot to estimate cable tension and external force, IEEE Rob. Autom. Lett., 2017 (2017). https://doi.org/10.1109/LRA.2017.2676347 doi: 10.1109/LRA.2017.2676347
|
| [22] |
Z. Wang, B. Zi, D. Wang, J. Qian, W. You, L. Yu, External force self-sensing based on cable-tension disturbance observer for surgical robot end-effector, IEEE Sens. J., 19 (2019), 5274–5284. https://doi.org/10.1109/JSEN.2019.2903776 doi: 10.1109/JSEN.2019.2903776
|
| [23] | G. Tholey, A. Pillarisetti, W. Green, J. P. Desai, Design, development, and testing of an automated laparoscopic grasper with 3-D force measurement capability, in International Symposium on Medical Simulation, Springer, (2004), 38–48. |
| [24] |
B. Zhao, C. A. Nelson, A sensorless force-feedback system for robot-assisted laparoscopic surgery, Comput. Assist. Surg., 24 (2019), 36–43. https://doi.org/10.1080/24699322.2018.1557887 doi: 10.1080/24699322.2018.1557887
|
| [25] |
N. Haouchine, W. Kuang, S. Cotin, M. C. Yip, Vision-based force feedback estimation for robot-assisted surgery using instrument-constrained biomechanical 3D maps, IEEE Rob. Autom. Lett., 3 (2018), 2160–2165. https://doi.org/10.1109/LRA.2018.2810948 doi: 10.1109/LRA.2018.2810948
|
| [26] |
W. J. Jung, K. S. Kwak, S. C. Lim, Vision-based suture tensile force estimation in robotic surgery, Sensors, 21 (2020), 110. https://doi.org/10.3390/s21010110 doi: 10.3390/s21010110
|
| [27] | Z. Chua, A. M. Jarc, A. M. Okamura, Toward force estimation in robot-assisted surgery using deep learning with vision and robot state, in IEEE International Conference on Robotics and Automation (ICRA), IEEE, (2021), 12335–12341. |
| [28] | E. Noohi, S. Parastegari, M. Žefran, Using monocular images to estimate interaction forces during minimally invasive surgery, in IEEE/RSJ International Conference on Intelligent Robots and Systems, IEEE, (2014), 4297–4302. |
| [29] |
A. Mozaffari, S. Behzadipour, M. Kohani, Identifying the tool-tissue force in robotic laparoscopic surgery using neuro-evolutionary fuzzy systems and a synchronous self-learning hyper level supervisor, Appl. Soft. Comput., 14 (2014), 12–30. https://doi.org/10.1016/j.asoc.2013.09.023 doi: 10.1016/j.asoc.2013.09.023
|
| [30] |
F. S. Gharehchopogh, M. Namazi, L. Ebrahimi, B. Abdollahzadeh, Advances in sparrow search algorithm: a comprehensive survey, Arch. Comput. Methods Eng., 30 (2023), 427–455. https://doi.org/10.1007/s11831-022-09804-w doi: 10.1007/s11831-022-09804-w
|
| [31] |
Y. Yue, L. Cao, D. Lu, Z. Hu, M. Xu, S. Wang, et al., Review and empirical analysis of sparrow search algorithm, Artif. Intell. Rev., 2023 (2023), 10867–10919. https://doi.org/10.1007/s10462-023-10435-1 doi: 10.1007/s10462-023-10435-1
|
| [32] |
J. Xue, B. Shen, A novel swarm intelligence optimization approach: sparrow search algorithm, Syst. Sci. Control Eng., 8 (2020), 22–34. https://doi.org/10.1080/21642583.2019.1708830 doi: 10.1080/21642583.2019.1708830
|
| [33] |
C. Zhang, S. Ding, A stochastic configuration network based on chaotic sparrow search algorithm, Knowledge-Based Syst., 220 (2021), 106924. https://doi.org/10.1016/j.knosys.2021.106924 doi: 10.1016/j.knosys.2021.106924
|
| [34] |
J. Rosen, J. D. Brown, S. De, M. Sinanan, B. Hannaford, Biomechanical properties of abdominal organs in vivo and postmortem under compression loads, J. Biomech. Eng., 130 (2008), 021020. https://doi.org/10.1115/1.2898712 doi: 10.1115/1.2898712
|
| [35] |
E. Heijnsdijk, J. Dankelman, D. Gouma, Effectiveness of grasping and duration of clamping using laparoscopic graspers, Surg. Endosc., 16 (2002), 1329–1331. https://doi.org/10.1007/s00464-001-9179-2 doi: 10.1007/s00464-001-9179-2
|
| [36] |
D. Oleynikov, B. Solomon, S. Hallbeck, Effect of visual feedback on surgical performance using the da Vinci® surgical system, J. Laparoendosc. Adv. Surg. Tech., 16 (2006), 503–508. https://doi.org/10.1089/lap.2006.16.503 doi: 10.1089/lap.2006.16.503
|













Figures(14) / Tables(1)

Yongli Yan, Tiansheng Sun, Teng Ren, Li Ding. Enhanced grip force estimation in robotic surgery: A sparrow search algorithm-optimized backpropagation neural network approach[J]. Mathematical Biosciences and Engineering, 2024, 21(3): 3519-3539. doi: 10.3934/mbe.2024155







 DownLoad:
DownLoad: