Amensalism, a rare yet impactful symbiotic relationship in ecological systems, is the focus of this study. We examine a discrete-time amensalism system by incorporating the fear effect on the first species. We identify the plausible equilibrium points and analyze their local stability conditions. The global attractivity of the positive equilibrium, $ E^* $, and the boundary equilibrium, $ E_1 $, are analyzed by exploring threshold conditions linked to the level of fear. Additionally, we analyze transcritical bifurcations and flip bifurcations exhibited by the boundary equilibrium points analytically. Considering some biologically feasible parameter values, we conduct extensive numerical simulations. From numerical simulations, it is observed that the level of fear has a stabilizing effect on the system dynamics when it increases. It eventually accelerates the extinction process for the first species as the level of fear continues to increase. These findings highlight the complex interplay between external factors and intrinsic system dynamics, enriching potential mechanisms for driving species changes and extinction events.
Citation: Qianqian Li, Ankur Jyoti Kashyap, Qun Zhu, Fengde Chen. Dynamical behaviours of discrete amensalism system with fear effects on first species[J]. Mathematical Biosciences and Engineering, 2024, 21(1): 832-860. doi: 10.3934/mbe.2024035
Amensalism, a rare yet impactful symbiotic relationship in ecological systems, is the focus of this study. We examine a discrete-time amensalism system by incorporating the fear effect on the first species. We identify the plausible equilibrium points and analyze their local stability conditions. The global attractivity of the positive equilibrium, $ E^* $, and the boundary equilibrium, $ E_1 $, are analyzed by exploring threshold conditions linked to the level of fear. Additionally, we analyze transcritical bifurcations and flip bifurcations exhibited by the boundary equilibrium points analytically. Considering some biologically feasible parameter values, we conduct extensive numerical simulations. From numerical simulations, it is observed that the level of fear has a stabilizing effect on the system dynamics when it increases. It eventually accelerates the extinction process for the first species as the level of fear continues to increase. These findings highlight the complex interplay between external factors and intrinsic system dynamics, enriching potential mechanisms for driving species changes and extinction events.

| [1] | J. P. Veiga, Commensalism, amensalism, and synnecrosis, Encycl. Evol. Biol., (2016), 322–328. https://doi.org/10.1016/B978-0-12-800049-6.00189-X |
| [2] |
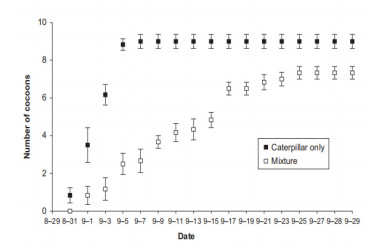
X. Xi, J. N. Griffin, S. Sun, Grasshoppers amensalistically suppress caterpillar performance and enhance plant biomass in an alpine meadow, Oikos, 122 (2013), 1049–1057. https://doi.org/10.1111/j.1600-0706.2012.00126.x doi: 10.1111/j.1600-0706.2012.00126.x

|
| [3] |
C. García, M. Rendueles, M. Díaz, Microbial amensalism in Lactobacillus casei and Pseudomonas taetrolens mixed culture, Bioprocess Biosyst. Eng., 40 (2017), 1111–1122. https://doi.org/10.1007/s00449-017-1773-3 doi: 10.1007/s00449-017-1773-3
|
| [4] |
J. P. Veiga, W. Wamiti, V. Polo, M. Muchai, Interphyletic relationships in the use of nesting cavities: Mutualism, competition and amensalism among hymenopterans and vertebrates, Naturwissenschaften, 100 (2013), 827–834. https://doi.org/10.1007/s00114-013-1082-x doi: 10.1007/s00114-013-1082-x
|
| [5] |
J. M. Gómez, A. González-Megías, Asymmetrical interactions between ungulates and phytophagous insects: Being different matters, Ecology, 83 (2002), 203–211. https://doi.org/10.1890/0012-9658(2002)083[0203:AIBUAP]2.0.CO;2 doi: 10.1890/0012-9658(2002)083[0203:AIBUAP]2.0.CO;2
|
| [6] |
Y. B. Hong, S. M. Chen, F. D. Chen, On the existence of positive periodic solution of an amensalism model with Beddington-DeAngelis functional response, WSEAS Trans. Math., 21 (2022), 572-579. https://doi.org/10.37394/23206.2022.21.64 doi: 10.37394/23206.2022.21.64
|
| [7] |
X. He, Z. Zhu, J. Chen, F. Chen, Dynamical analysis of a Lotka Volterra commensalism model with additive Allee effect, Open Math., 20 (2022), 646–665. https://doi.org/10.1515/math-2022-0055 doi: 10.1515/math-2022-0055
|
| [8] |
L. L. Xu, Y. L. Xue, Q. F. Lin, C. Q. Lei, Global attractivity of symbiotic model of commensalism in four populations with Michaelis-Menten type harvesting in the first commensal populations, Axioms, 11 (2022), 337. https://doi.org/10.3390/axioms11070337 doi: 10.3390/axioms11070337
|
| [9] | G. C. Sun, Qualitative analysis on two populations amensalism model, J. Jiamusi Univ., 21 (2003), 283–286. |
| [10] | Z. F. Zhu, Y. A. Li, F. Xu, Mathematical analysis on commensalism Lotka-Volterra model of populations, J. Chongqing Inst. Technol., 8 (2008), 100–101. |
| [11] | Z. Wei, Y. Xia, T. Zhang, Stability and bifurcation analysis of an amensalism model with weak Allee effect, Qualitative Theory Dyn. Syst., 19 (2020). https://doi.org/10.1007/s12346-020-00341-0 |
| [12] |
D. Luo, Q. Wang, Global dynamics of a Holling-II amensalism system with nonlinear growth rate and Allee effect on the first species, Int. J. Bifurcation Chaos, 31 (2021), 2150050. https://doi.org/10.1142/S0218127421500504 doi: 10.1142/S0218127421500504
|
| [13] |
D. Luo, Q. Wang, Global dynamics of a Beddington-DeAngelis amensalism system with weak Allee effect on the first specie, Appl. Math. Comput., 408 (2021), 126368. https://doi.org/10.1016/j.amc.2021.126368 doi: 10.1016/j.amc.2021.126368
|
| [14] | M. Zhao, Y. Du, Stability and bifurcation analysis of an amensalism system with Allee effect, Adv. Differ. Equations, 2020 (2020). https://doi.org/10.1186/s13662-020-02804-9 |
| [15] |
H. Liu, H. Yu, C. Dai, H. Deng, Dynamical analysis of an aquatic amensalism model with non-selective harvesting and Allee effect, Math. Biosci. Eng., 18 (2021), 8857–8882. https://doi.org/10.3934/mbe.2021437 doi: 10.3934/mbe.2021437
|
| [16] |
R. Wu, A two species amensalism model with non-monotonic functional response, Commun. Math. Biol. Neurosci., 2016 (2016), 19. https://doi.org/10.28919/cmbn/2839 doi: 10.28919/cmbn/2839
|
| [17] |
Y. B. Chong, S. M. Chen, F. D. Chen, On the existence of positive periodic solution of an amensalism model with Beddington-DeAngelis functional response, WSEAS Trans. Math., 21 (2022), 572–579. https://doi.org/10.37394/23206.2022.21.64 doi: 10.37394/23206.2022.21.64
|
| [18] |
X. Guan, F, Chen, Dynamical analysis of a two species amensalism model with Beddington-DeAngelis functional response and Allee effect on the second species, Nonlinear Anal. Real World Appl., 48 (2019), 71–93. https://doi.org/10.1016/j.nonrwa.2019.01.002 doi: 10.1016/j.nonrwa.2019.01.002
|
| [19] | Y. Liu, L. Zhao, X. Huang, H. Deng, Stability and bifurcation analysis of two species amensalism model with Michaelis-Menten type harvesting and a cover for the first species, Adv. Differ. Equations, 2018 (2018). https://doi.org/10.1186/s13662-018-1752-2 |
| [20] |
M. Zhao, Y. Ma, Y. Du, Global dynamics of an amensalism system with Michaelis-Menten type harvesting, Electron. Res. Arch., 31 (2022), 549–574. https://doi.org/10.3934/era.2023027 doi: 10.3934/era.2023027
|
| [21] |
Q. Zhou, F. Chen, S. Lin, Complex dynamics analysis of a discrete amensalism system with a cover for the first species, Axioms, 11 (2022), 365. https://doi.org/10.3390/axioms11080365 doi: 10.3390/axioms11080365
|
| [22] | C. Lei, Dynamic behaviors of a stage structure amensalism system with a cover for the first species, Adv. Differ. Equations, 2018 (2018). https://doi.org/10.1186/s13662-018-1729-1 |
| [23] | Y. Liu, L. Zhao, X. Huang, H. Deng, Stability and bifurcation analysis of two species amensalism model with Michaelis-Menten type harvesting and a cover for the first species, Adv. Differ. Equations, 2018 (2018). https://doi.org/10.1186/s13662-018-1752-2 |
| [24] |
X. D. Xie, F. D. Chen, M. X. He, Dynamic behaviors of two species amensalism model with a cover for the first species, J. Math. Comput. Sci., 16 (2016), 395–401. http://dx.doi.org/10.22436/jmcs.016.03.09 doi: 10.22436/jmcs.016.03.09
|
| [25] |
L. Y. Zanette, A. F. White, M. C. Allen, M. Clinchy, Perceived predation risk reduces the number of offspring songbirds produce per year, Science, 334 (2011), 1398–1401. https://doi.org/10.1126/science.1210908 doi: 10.1126/science.1210908
|
| [26] |
K. H. Elliott, G. S. Betini, D. R. Norris, Experimental evidence for within- and cross-seasona effects of fear on survival and reproduction, J. Anim. Ecol., 85 (2010), 507–515. https://doi.org/10.1111/1365-2656.12487 doi: 10.1111/1365-2656.12487
|
| [27] |
X. Wang, L. Zanette, X. Zou, Modelling the fear effect in predator-prey interactions, J. Math. Biol., 73 (2016), 1179–1204. https://doi.org/10.1007/s00285-016-0989-1 doi: 10.1007/s00285-016-0989-1
|
| [28] |
A. A. Thirthar, S. J. Majeed, M. A. Alqudah, P. Panja, T. Abdeljawad, Fear effect in a predator-prey model with additional food, prey refuge and harvesting on super predator, Chaos Solitons Fractals, 159 (2022), 112091. https://doi.org/10.1016/j.chaos.2022.112091 doi: 10.1016/j.chaos.2022.112091
|
| [29] |
K. Sarkar, S. Khajanchi, Impact of fear effect on the growth of prey in a predator-prey interaction model, Ecol. Complexity, 42 (2020), 100826. https://doi.org/10.1016/j.ecocom.2020.100826 doi: 10.1016/j.ecocom.2020.100826
|
| [30] |
J. Chen, X. He, F. Chen, The influence of fear effect to a discrete-time predator-prey system with predator has other food resource, Mathematics, 9 (2021), 865. https://doi.org/10.3390/math9080865 doi: 10.3390/math9080865
|
| [31] |
D. L. Ogada, M. E. Gadd, R. S. Ostfeld, T. P. Young, F. Keesing, Impacts of large herbivorous mammals on bird diversity and abundance in an African savanna, Oecologia, 156 (2008), 387–397. https://doi.org/10.1007/s00442-008-0994-1 doi: 10.1007/s00442-008-0994-1
|
| [32] |
Q. Zhou, F. Chen, Dynamical analysis of a discrete amensalism system with the Beddington-DeAngelis functional response and Allee effect for the unaffected species, Qualitative Theory Dyn. Syst., 22 (2023), 16. https://doi.org/10.1007/s12346-022-00716-5 doi: 10.1007/s12346-022-00716-5
|
| [33] |
P. Panday, N. Pal, S. Samanta, J. Chattopadhyay, A three species food chain model with fear induced trophic cascade, Int. J. Appl. Comput. Math., 5 (2019), 1–26. https://doi.org/10.1007/s40819-019-0688-x doi: 10.1007/s40819-019-0688-x
|
| [34] |
S. K. Sasmal, Y. Takeuchi, Dynamics of a predator-prey system with fear and group defense, J. Math. Anal. Appl., 481 (2020), 123471. https://doi.org/10.1016/j.jmaa.2019.123471 doi: 10.1016/j.jmaa.2019.123471
|
| [35] |
H. Zhang, Y. Cai, S. Fu, W. Wang, Impact of the fear effect in a prey-predator model incorporating a prey refuge, Appl. Math. Comput., 356 (2019), 328–337. https://doi.org/10.1016/j.amc.2019.03.034 doi: 10.1016/j.amc.2019.03.034
|
| [36] |
H. Singh, J. Dhar, H. S. Bhatti, Discrete-time bifurcation behavior of a prey-predator system with generalized predator, Adv. Differ. Equations, 2015 (2015), 206. https://doi.org/10.1186/s13662-015-0546-z doi: 10.1186/s13662-015-0546-z
|
| [37] |
R. Banerjee, P. Das, D. Mukherjee, Stability and permanence of a discrete-time two-prey one-predator system with Holling type-III functional response, Chaos Solitons Fractals, 117 (2018), 240–248. https://doi.org/10.1016/j.chaos.2018.10.032 doi: 10.1016/j.chaos.2018.10.032
|
| [38] |
Q. Din, Complexity and chaos control in a discrete-time prey-predator mode, Commun. Nonlinear Sci. Numer. Simul., 49 (2018), 113–134. https://doi.org/10.1016/j.cnsns.2017.01.025 doi: 10.1016/j.cnsns.2017.01.025
|
| [39] |
H. Jiang, T.D. Rogers, The discrete dynamics of symmetric competition in the plane, J. Math. Biol., 25 (1978), 573–596. https://doi.org/10.1007/BF00275495 doi: 10.1007/BF00275495
|
| [40] |
F. Chen, Permanence for the discrete mutualism model with time delays, Math. Comput. Modell., 47 (2008), 431–435. https://doi.org/10.1016/j.mcm.2007.02.023 doi: 10.1016/j.mcm.2007.02.023
|
| [41] |
D. C. Liaw, Application of center manifold reduction to nonlinear system stabilization, Appl. Math. Comput., 91 (1998), 243-258. https://doi.org/10.1016/S0096-3003(97)10021-2 doi: 10.1016/S0096-3003(97)10021-2
|
| [42] | S. Wiggins, Introduction to Applied Nonlinear Dynamical Systems and Chaos, Springer Science and Business Media, 2003. |
| [43] | C. Robinson, Dynamical Systems: Stability, Symbolic Dynamics and Chaos, CRC Press, 1998. |














Figures(15) / Tables(3)

Qianqian Li, Ankur Jyoti Kashyap, Qun Zhu, Fengde Chen. Dynamical behaviours of discrete amensalism system with fear effects on first species[J]. Mathematical Biosciences and Engineering, 2024, 21(1): 832-860. doi: 10.3934/mbe.2024035







 DownLoad:
DownLoad: