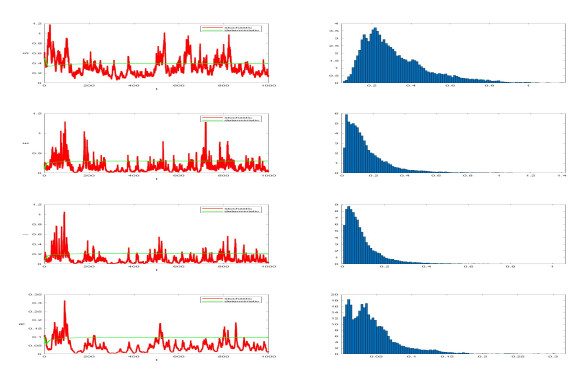
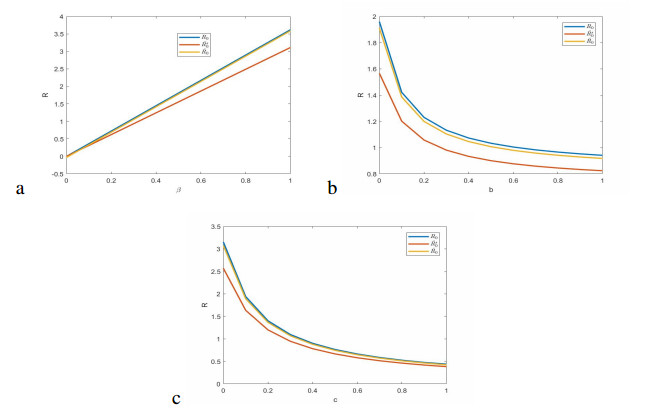
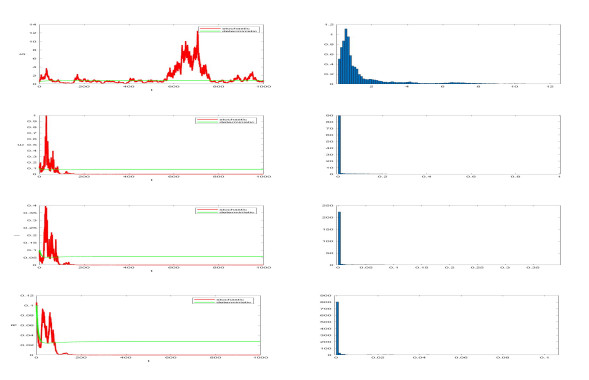
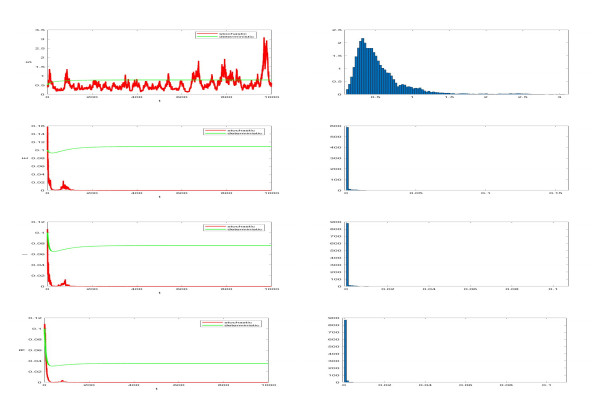
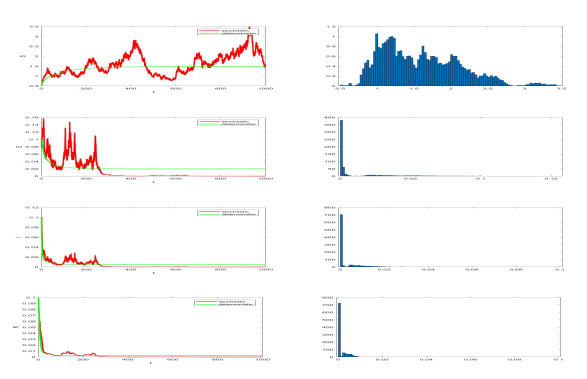
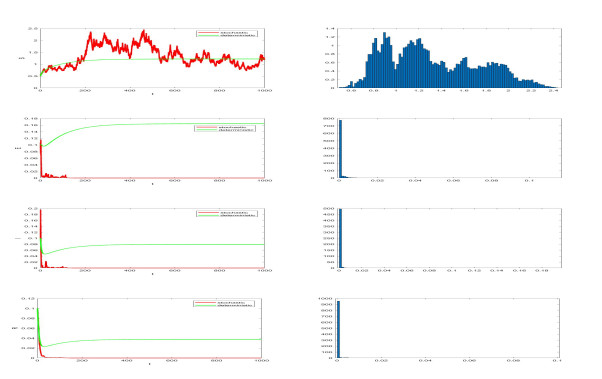
Influenza is a respiratory infection caused influenza virus. To evaluate the effect of environment noise on the transmission of influenza, our study focuses on a stochastic influenza virus model with disease resistance. We first prove the existence and uniqueness of the global solution to the model. Then we obtain the existence of a stationary distribution to the positive solutions by stochastic Lyapunov function method. Moreover, certain sufficient conditions are provided for the extinction of the influenza virus flu. Finally, several numerical simulations are revealed to illustrate our theoretical results. Conclusively, according to the results of numerical models, increasing disease resistance is favorable to disease control. Furthermore, a simple example demonstrates that white noise is favorable to the disease's extinction.
Citation: Ming-Zhen Xin, Bin-Guo Wang, Yashi Wang. Stationary distribution and extinction of a stochastic influenza virus model with disease resistance[J]. Mathematical Biosciences and Engineering, 2022, 19(9): 9125-9146. doi: 10.3934/mbe.2022424
Influenza is a respiratory infection caused influenza virus. To evaluate the effect of environment noise on the transmission of influenza, our study focuses on a stochastic influenza virus model with disease resistance. We first prove the existence and uniqueness of the global solution to the model. Then we obtain the existence of a stationary distribution to the positive solutions by stochastic Lyapunov function method. Moreover, certain sufficient conditions are provided for the extinction of the influenza virus flu. Finally, several numerical simulations are revealed to illustrate our theoretical results. Conclusively, according to the results of numerical models, increasing disease resistance is favorable to disease control. Furthermore, a simple example demonstrates that white noise is favorable to the disease's extinction.

| [1] | B. J. Coburn, Multi-Species Influenza Models with Recombination, Ph.D thesis, University of Miami, 2009. |
| [2] |
C. Fraser, C. A. Donnelly, S. Cauchemez, W. P. Hanage, M. D. Van Kerkhove, T. D. Hollingsworth, et al., Pandemic potential of a strain of influenza A(H1N1): Early finding, Science, 324 (2009), 1557–1561. https://doi.org/10.1126/science.1176062 doi: 10.1126/science.1176062

|
| [3] |
N. M. Ferguson, S. Mallett, H. Jackson, N. Roberts, P. Ward, A population dynamic model for evaluating the potential spread of drug-resistant influenza virus infections during community-based use of antivirals, J. Antimicrob. Chemother., 51 (2003), 977–990. https://doi.org/10.1093/jac/dkg136 doi: 10.1093/jac/dkg136
|
| [4] | P. Pongsumpun, I. M. Tang, Mathematical model of the symptomatic and asymptomatic infections of Swine flu, Int. J. Math. Models Meth. Appl. Sci., 2 (2011), 247–254. |
| [5] |
X. Zhou, Z. Guo, Analysis of an influenza A (H1N1) epidemic model with vaccination, Arab. J. Math, 1 (2012), 267–282. https://doi.org/10.1007/s40065-012-0013-6 doi: 10.1007/s40065-012-0013-6
|
| [6] |
N. H. Khanh, Stability analysis of an influenza virus model with disease resistance, J. Egypt. Math. Soc., 24 (2016), 193–199. https://doi.org/10.1016/j.joems.2015.02.003 doi: 10.1016/j.joems.2015.02.003
|
| [7] |
S. Allegretti, I. M. Bulai, R. Marino, M. A. Menandro, K. Parisi, Vaccination effect conjoint to fraction of avoided contacts for a Sars-Cov-2 mathematical model, Math. Model. Numer. Simulat. Appl., 1 (2021), 56–66. https://doi.org/10.53391/mmnsa.2021.01.006 doi: 10.53391/mmnsa.2021.01.006
|
| [8] |
P. Kumar, V. S. Erturk, Dynamics of cholera disease by using two recent fractional numerical methods, Math. Model. Numer. Simulat. Appl., 1 (2021), 102–111. https://doi.org/10.53391/mmnsa.2021.01.010 doi: 10.53391/mmnsa.2021.01.010
|
| [9] |
F. Özköse, M. Yavuz, Investigation of interactions between COVID-19 and diabetes with hereditary traits using real data: A case study in Turkey, Comput. Biol. Med., 141 (2022), 105044. https://doi.org/10.1016/j.compbiomed.2021.105044 doi: 10.1016/j.compbiomed.2021.105044
|
| [10] |
P. A. Naik, M. Yavuz, S. Qureshi, J. Zu, S. Townley, Modeling and analysis of COVID-19 epidemics with treatment in fractional derivatives using real data from Pakistan, Eur. Phys. J. Plus., 135 (2020), 1–42. https://doi.org/10.1140/epjp/s13360-020-00819-5 doi: 10.1140/epjp/s13360-020-00819-5
|
| [11] |
M. Yavuz, N. Özdemir, Analysis of an epidemic spreading model with exponential decay law, Math. Sci. Appl. E Notes, 8 (2020), 142–154. https://doi.org/10.36753/mathenot.691638 doi: 10.36753/mathenot.691638
|
| [12] |
P. A. Naik, M. Yavuz, J. Zu, The role of prostitution on HIV transmission with memory: A modeling approach, Alex. Eng. J., 59 (2020), 2513–2531. https://doi.org/10.1016/j.aej.2020.04.016 doi: 10.1016/j.aej.2020.04.016
|
| [13] |
M. Yavuz, N. Stability analysis and numerical computation of the fractional predator–prey model with the harvesting rate, Fractal Fract., 4 (2020), 35. https://doi.org/10.3390/fractalfract4030035 doi: 10.3390/fractalfract4030035
|
| [14] |
P. A. Naik, Z. Eskandri, H. E. Shahraki, Flip and generalized flip bifurcations of a two-dimensional discrete-time chemical model, Math. Model. Numer. Simulat. Appl., 1 (2021), 95–101. https://doi.org/10.53391/mmnsa.2021.01.009 doi: 10.53391/mmnsa.2021.01.009
|
| [15] |
A. Julia, L. H. Mariajesus, Cumulative and maximum epidemic sizes for a nonlinear SEIR stochastic model with limited resources, Discrete Contin. Dyn. Syst. Ser. B, 23 (2018), 3137–3151. http://dx.doi.org/10.3934/dcdsb.2017211 doi: 10.3934/dcdsb.2017211
|
| [16] |
Q. Liu, D. Jiang, N. Shi, T. Hayat, B. Ahmad, Stationary distribution and extinction of stochastic SEIR epidemic model with standard incidence, Phys. A, 476 (2017), 58-69. https://doi.org/10.1016/j.physa.2017.02.028 doi: 10.1016/j.physa.2017.02.028
|
| [17] |
Q. Liu, D. Jiang, N. Shi, T. Hayat, A. Alsaedi, Asymptotic behavior of a stochastic delayed SEIR epidemic model with nonlinear incidence, Phys. A, 462 (2016), 870–882. https://doi.org/10.1016/j.physa.2016.06.095 doi: 10.1016/j.physa.2016.06.095
|
| [18] |
M. Z. Xin, B. G. Wang, Stationary distribution and extinction of a stochastic tuberculosis model, Phys. A, 545 (2020), 123741. https://doi.org/10.1016/j.physa.2019.123741 doi: 10.1016/j.physa.2019.123741
|
| [19] |
Q. Yang, X. Mao, Extinction and recurrence of multi-group SEIR epidemic models with stochastic perturbations, Nonlinear Anal. Real World Appl., 14 (2013), 1434–1456. https://doi.org/10.1016/j.nonrwa.2012.10.007 doi: 10.1016/j.nonrwa.2012.10.007
|
| [20] |
R. Ikram, A. Khan, M. Zahri, A. Saeed, M. Yavuz, P. Kumam, Extinction and stationary distribution of a stochastic COVID-19 epidemic model with time-delay, Comput. Biol. Med., 141 (2022), 105115. https://doi.org/10.1016/j.compbiomed.2021.105115 doi: 10.1016/j.compbiomed.2021.105115
|
| [21] | X. Mao, Stochastic Differential Equations and Their Application, Horwood, Chichester, 1997. |
| [22] | R. Z. Khasminskii, Stochastic Stability of Differential Equations, Sijthoff & Noordhoff, 1980. |
| [23] |
D. J. Highama, An algorithmic introduction to numerical simulation of stochastic differential equation, SIAM Rev., 43 (2001), 525–546. https://doi.org/10.1137/S0036144500378302 doi: 10.1137/S0036144500378302
|
| [24] |
X. B. Zhang, S. C. Chang, Q. H. Shi, H. F. Huo, Qualitative study of a stochastic SIS epidemic model with vertical transmission, Phys. A, 505 (2018), 805–817. https://doi.org/10.1016/j.physa.2018.04.022 doi: 10.1016/j.physa.2018.04.022
|
Figures(6)

Ming-Zhen Xin, Bin-Guo Wang, Yashi Wang. Stationary distribution and extinction of a stochastic influenza virus model with disease resistance[J]. Mathematical Biosciences and Engineering, 2022, 19(9): 9125-9146. doi: 10.3934/mbe.2022424







 DownLoad:
DownLoad: