Due to the growing demand for timber, forest soils are increasingly exposed to mechanical disturbances, caused by forestry equipment. Even though using skidding machines to transport wood is detrimental to the physical state of the soil, this method remains the most common. Hence, there is a need to model the impact of skidding systems on the upper (fertile) layer of the soil. This study aims to develop such a model using the D'Alembert principle, the method of Laplace transforms, and a modified Kelvin-Voigt model. The work shows that subdividing the tractor-bundle-soil system makes it possible to consider the dynamic effect of the vibrating tractor on the soil and soil's ability to undergo deformation separately. In addition, the study developed individual models for the first subsystem that determine vibration effects on soil caused by an unloaded tractor and two loaded skidding systems using different methods of semi-suspended skidding. The present findings can be used to predict the degree of dynamic soil compaction without conducting direct on-site experiments and thus minimize the negative impact of forestry operations on the local ecosystem. The current data also allow simplifying design models for complex forwarders.
Citation: Igor Grigorev, Albert Burgonutdinov, Valentin Makuev, Evgeniy Tikhonov, Viktoria Shvetsova, Oksana Timokhova, Sergey Revyako, Natalia Dmitrieva. The theoretical modeling of the dynamic compaction process of forest soil[J]. Mathematical Biosciences and Engineering, 2022, 19(3): 2935-2949. doi: 10.3934/mbe.2022135
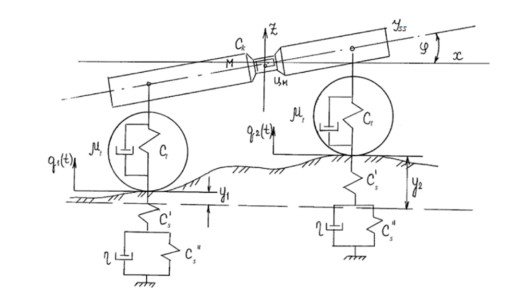
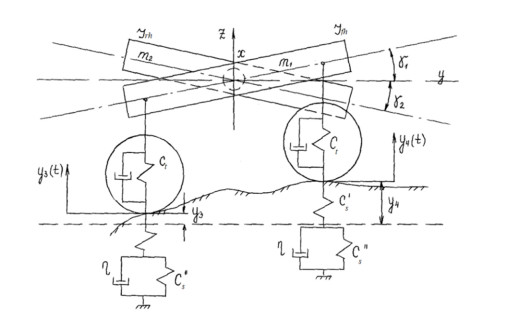
Due to the growing demand for timber, forest soils are increasingly exposed to mechanical disturbances, caused by forestry equipment. Even though using skidding machines to transport wood is detrimental to the physical state of the soil, this method remains the most common. Hence, there is a need to model the impact of skidding systems on the upper (fertile) layer of the soil. This study aims to develop such a model using the D'Alembert principle, the method of Laplace transforms, and a modified Kelvin-Voigt model. The work shows that subdividing the tractor-bundle-soil system makes it possible to consider the dynamic effect of the vibrating tractor on the soil and soil's ability to undergo deformation separately. In addition, the study developed individual models for the first subsystem that determine vibration effects on soil caused by an unloaded tractor and two loaded skidding systems using different methods of semi-suspended skidding. The present findings can be used to predict the degree of dynamic soil compaction without conducting direct on-site experiments and thus minimize the negative impact of forestry operations on the local ecosystem. The current data also allow simplifying design models for complex forwarders.

| [1] |
D. Abdizadeh, M. S. Pakbaz, B. Nadi, Numerical modeling of lateral dynamic compaction on the slope in dry sand, KSCE J. Civ. Eng., 25 (2021), 398-403. https://doi.org/10.1007/s12205-020-2344-8. doi: 10.1007/s12205-020-2344-8

|
| [2] |
M. Allman, J. Merganič, K. Merganičová, Z. Dudáková, Machinery-induced damage to soil and remaining forest stands—Case study from Slovakia, Forests, 11 (2020), 1289. https://doi.org/10.3390/f11121289. doi: 10.3390/f11121289
|
| [3] | R. Naghdi, S. R. Mousavi, Impacts of rubber-tired skidder and crawler tractor on forest soil in the mountainous forests of Northern Iran, Power, 88 (2016), 130. |
| [4] | Z. Błaszkiewicz, Identification and quantification of selected factors determining soil compression by tractors of weights with single wheels and dual wheels, J. Res. Appl. Agric. Eng., 64 (2019), 4-12. |
| [5] | G. F. Botta, J. F. Bienvenido, D. L. Antille, E. R. D. Rivero, E. E. Contessotto, D. G. Ghelfi, et al., Effect of traffic with a light-weight tractor on physical properties of an aridisol soil in Almeria, Spain, Rev. Fac. Cienc. Agrar. UNCuyo, 51 (2019), 270-279. |
| [6] | W. Tonui, C. Ndiema, E. K. Mutai, Determination of soil compaction levels by agricultural machinery in cultivated fields using dynamic cone penetrometer, Int. J. Res. Appl. Sci. Eng. Technol., 4 (2016), 494-500. |
| [7] |
R. Naghdi, A. Solgi, U. Ilstedt, Soil chemical and physical properties after skidding by rubber-tired skidder in Hyrcanian forest, Iran, Geoderma, 265 (2016), 12-18. https://doi.org/10.1016/j.geoderma.2015.11.009. doi: 10.1016/j.geoderma.2015.11.009
|
| [8] |
I. Grigorev, O. G. Kunickaya, A. Burgonutdinov, V. Ivanov, S. Shuvalova, V. Shvetsova, et al., Theoretical studies of dynamic soil compaction by wheeled forestry machines, Diagnostyka, 21 (2020), 3-13. https://doi.org/10.29354/diag/127650. doi: 10.29354/diag/127650
|
| [9] |
A. Solgi, A. Najafi, D. S. Page-Dumroese, E. K. Zenner, Assessment of topsoil disturbance caused by different skidding machine types beyond the margins of the machine operating trail, Geoderma, 367 (2020), 114238. https://doi.org/10.1016/j.geoderma.2020.114238. doi: 10.1016/j.geoderma.2020.114238
|
| [10] |
C. Wersäll, I. Nordfelt, S. Larsson, Soil compaction by vibratory roller with variable frequency, Geotechnique, 67 (2017), 272-278. https://doi.org/10.1680/jgeot.16.P.051. doi: 10.1680/jgeot.16.P.051
|
| [11] |
R. Picchio, P. S. Mederski, F. Tavankar, How and how much, do harvesting activities affect forest soil, regeneration and stands? Curr. For. Rep., 6 (2020), 115-128. https://doi.org/10.1007/s40725-020-00113-8. doi: 10.1007/s40725-020-00113-8
|
| [12] |
I. Grigorev, O. Kunickaya, A. Burgonutdinov, E. Tikhonov, V. Makuev, S. Egipko, et al., Modeling the effect of wheeled tractors and skidded timber bunches on forest soil compaction, J. Appl. Eng. Sci., 19 (2021), 439-447. https://doi.org/10.5937/jaes0-28528. doi: 10.5937/jaes0-28528
|
| [13] | S. Rudov, V. Shapiro, I. Grigorev, O. Kunitskaya, V. Druzyanova, G. Kokieva, et al., Specific features of influence of propulsion plants of the wheel-tyre tractors upon the cryomorphic soils, soils, and soil grounds, Int. J. Civ. Eng. Technol., 10 (2019), 2052-2071. |
| [14] |
P. Edwin, K. Shankar, K. Kannan, Soft soil track interaction modeling in single rigid body tracked vehicle models, J. Terramechanics, 77 (2018), 1-14. https://doi.org/10.1016/j.jterra.2018.01.001. doi: 10.1016/j.jterra.2018.01.001
|
| [15] |
H. Vereecken, A. Schnepf, J. W. Hopmans, M. Javaux, D. O. T. Roose, J. Vanderborght, et al., Modeling soil processes: review, key challenges, and new perspectives, Vadose Zone J., 15 (2016), 1-57. https://doi.org/10.2136/vzj2015.09.0131. doi: 10.2136/vzj2015.09.0131
|
| [16] |
R. P. Silva, M. M. Rolim, I. F. Gomes, E. M. R. Pedrosa, U. E. Tavares, A. N. Santos, Numerical modeling of soil compaction in a sugarcane crop using the finite element method, Soil Tillage Res., 181 (2018), 1-10. https://doi.org/10.1016/j.still.2018.03.019. doi: 10.1016/j.still.2018.03.019
|
| [17] |
R. Zhang, Y. Sun, E. Song, Simulation of dynamic compaction and analysis of its efficiency with the material point method, Comput. Geotech., 116 (2019) 103218. https://doi.org/10.1016/j.compgeo.2019.103218. doi: 10.1016/j.compgeo.2019.103218
|
| [18] | G. He, P. Hu, A. Ji, D. Zhu, W. Liao, Stress and sinking property analysis of legged robot foot with toe structure in soft soil, in 2017 International Conference on Computer Systems, Electronics and Control (ICCSEC), IEEE, (2017), 131-135. https://doi.org/10.1109/ICCSEC.2017.8446754. |
| [19] |
J. Hwang, R. Manchanda, M. M. Sharma, An extended finite volume model for implicit cohesive zone fracture propagation in a poroelastic medium, Comput. Methods Appl. Mech. Eng., 350 (2019), 571-594. https://doi.org/10.1016/j.cma.2019.03.040. doi: 10.1016/j.cma.2019.03.040
|
| [20] |
C. Bojanowski, Numerical modeling of large deformations in soil structure interaction problems using FE, EFG, SPH, and MM-ALE formulations, Arch. Appl. Mech., 84 (2014), 743-755. https://doi.org/10.1007/s00419-014-0830-5. doi: 10.1007/s00419-014-0830-5
|
| [21] | D. Zamolodchikov, A. Shvidenko, S. Bartalev, E. Kulikova, A. Held, R. Valentini, et al., State of Russian forests and forestry, in Russian Forests and Climate Change, European Forest Institute, (2020), 17-20. |
| [22] | R. Proctor, Fundamental principles of soil compaction, Engineering News-Record, 111 (1933), 1-7. |
| [23] |
J. Kodikara, T. Islam, A. Sounthararajah, Review of soil compaction: history and recent developments, Transp. Geotech., 17 (2018), 24-34. https://doi.org/10.1016/j.trgeo.2018.09.006. doi: 10.1016/j.trgeo.2018.09.006
|
| [24] |
J. Ghorbani, M. Nazem, J. P. Carter, Dynamic compaction of clays: Numerical study based on the mechanics of unsaturated soils, Int. J. Geomech., 20 (2020), 04020195. https://doi.org/10.1061/(ASCE)GM.1943-5622.0001840. doi: 10.1061/(ASCE)GM.1943-5622.0001840
|
| [25] |
F. Tatsuoka, T. Hashimoto, K. Tateyama, Soil stiffness as a function of dry density and the degree of saturation for compaction control, Soils Found., 61 (2021), 989-1002. https://doi.org/10.1016/j.sandf.2021.06.007. doi: 10.1016/j.sandf.2021.06.007
|
| [26] |
W. Wang, J. Dou, J. Chen, J. Wang, Numerical analysis of the soil compaction degree under multi-location tamping, J. Shanghai Jiaotong Univ., 22 (2017), 417-433. https://doi.org/10.1007/s12204-017-1856-y. doi: 10.1007/s12204-017-1856-y
|
| [27] |
E. G. Khitrov, A. V. Andronov, Mathematical model of interaction between forest machine mover and consolidating soil, J. Phys.: Conf. Ser., 1177 (2019), 012030. https://doi.org/10.1088/1742-6596/1177/1/012030. doi: 10.1088/1742-6596/1177/1/012030
|
| [28] | I. S. Tyuremnov, A. S. Morev, D. V. Furmanov, On the justification of the value of the apparent mass of soil in rheological modeling of the process of soil compaction by a vibrating roller, J. Phys.: Conf. Ser., IOP Publishing, 260 (2019), 112033. https://doi.org/10.1088/1742-6596/1260/11/112033. |
| [29] |
A. Zachár, I. Keppler, I. Oldal, Investigation of the applicability and efficiency of different mathematical modeling and numerical simulation methods for soil-tool interaction, J. Comput. Appl. Mech., 11 (2016), 77-94. https://doi.org/10.32973/jcam.2016.006. doi: 10.32973/jcam.2016.006
|
Figures(6) / Tables(1)

Igor Grigorev, Albert Burgonutdinov, Valentin Makuev, Evgeniy Tikhonov, Viktoria Shvetsova, Oksana Timokhova, Sergey Revyako, Natalia Dmitrieva. The theoretical modeling of the dynamic compaction process of forest soil[J]. Mathematical Biosciences and Engineering, 2022, 19(3): 2935-2949. doi: 10.3934/mbe.2022135







 DownLoad:
DownLoad: