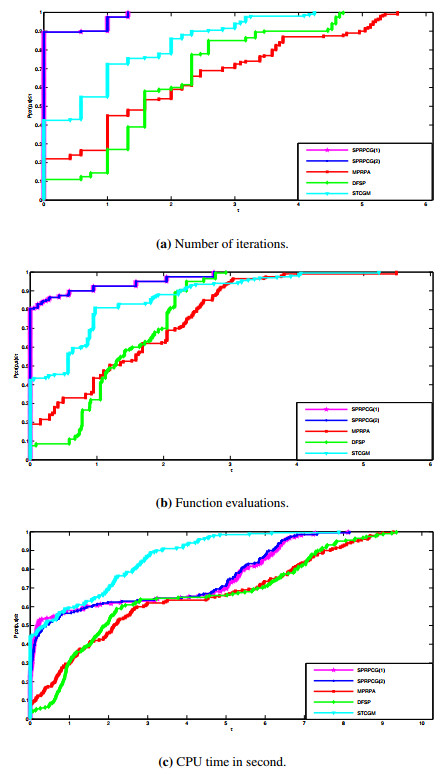
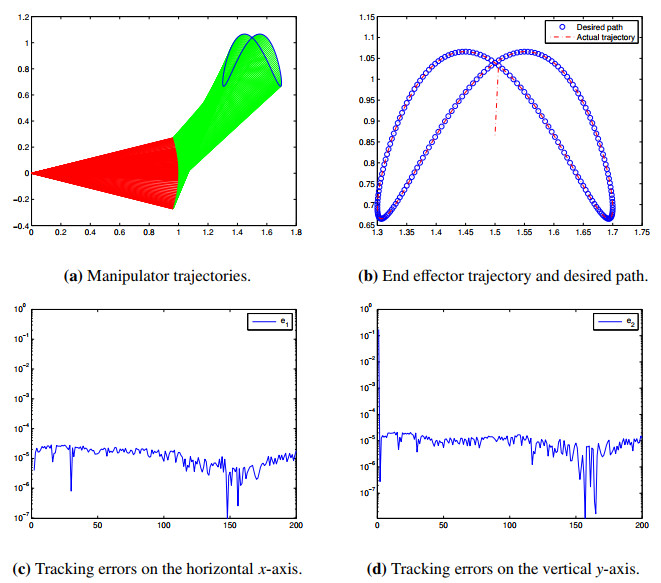
This paper proposes Polak-Ribi$ \grave{e} $re-Polyak (PRP) conjugate gradient (CG) directions based on two efficient scaling strategies. The first scaling parameter is determined by approaching the quasi-Newton direction, and the second by utilizing the well-known Barzilai-Borwein approach. In addition, we proposed two directions that satisfy the sufficient descent criterion regardless of the line search strategy. The proposed directions lead to a matrix-free algorithm for solving monotone-constrained nonlinear systems. The proposed algorithm's global convergence analysis is presented using some underlying assumptions. Furthermore, a detailed numerical comparison with other existing algorithms revealed that the proposed algorithm is both efficient and effective. Finally, the proposed technique is applied to the motion control problem of a two-joint planar robotic manipulator.
Citation: Jamilu Sabi'u, Ali Althobaiti, Saad Althobaiti, Soubhagya Kumar Sahoo, Thongchai Botmart. A scaled Polak-Ribi$ \grave{e} $re-Polyak conjugate gradient algorithm for constrained nonlinear systems and motion control[J]. AIMS Mathematics, 2023, 8(2): 4843-4861. doi: 10.3934/math.2023241
This paper proposes Polak-Ribi$ \grave{e} $re-Polyak (PRP) conjugate gradient (CG) directions based on two efficient scaling strategies. The first scaling parameter is determined by approaching the quasi-Newton direction, and the second by utilizing the well-known Barzilai-Borwein approach. In addition, we proposed two directions that satisfy the sufficient descent criterion regardless of the line search strategy. The proposed directions lead to a matrix-free algorithm for solving monotone-constrained nonlinear systems. The proposed algorithm's global convergence analysis is presented using some underlying assumptions. Furthermore, a detailed numerical comparison with other existing algorithms revealed that the proposed algorithm is both efficient and effective. Finally, the proposed technique is applied to the motion control problem of a two-joint planar robotic manipulator.

| [1] |
Z. Dai, H. Zhou, F Wen, S. He, Efficient predictability of stock return volatility: The role of stock market implied volatility, N. Am. J. Econ. Financ., 52 (2020), 101174. https://doi.org/10.1016/j.najef.2020.101174 doi: 10.1016/j.najef.2020.101174

|
| [2] |
M. Figueiredo, R. Nowak, S. J. Wright, Gradient projection for sparse reconstruction application to compressed sensing and other inverse problems, IEEE J-STSP, 1 (2007), 586–597. https://doi.org/10.1109/JSTSP.2007.910281 doi: 10.1109/JSTSP.2007.910281
|
| [3] | J. M. Ortega, W. C. Rheinboldt, Iterative solution of nonlinear equations in several variables, Academic Press, 1970. |
| [4] |
G. Zhou, K. C. Toh, Superlinear convergence of a Newton-type algorithm for monotone equations, J. Optim. Theory Appl., 125 (2005), 205–221. https://doi.org/10.1007/s10957-004-1721-7 doi: 10.1007/s10957-004-1721-7
|
| [5] |
J. Sabi'u, A. Shah, M. Y. Waziri, A modified Hager-Zhang conjugate gradient method with optimal choices for solving monotone nonlinear equations, Int. J. Comput. Math., 99 (2022), 332–354. https://doi.org/10.1080/00207160.2021.1910814 doi: 10.1080/00207160.2021.1910814
|
| [6] | E. Polak, G. Ribi$\grave{e}$re, Note sur la convergence de methods de directions conjugees, Rev. Fr. Inform. Rech. Oper., 16 (1969), 35–43. |
| [7] |
W. Cheng, A PRP type method for systems of monotone equations, Math. Comput. Model., 50 (2009), 15–20. https://doi.org/10.1016/j.mcm.2009.04.007 doi: 10.1016/j.mcm.2009.04.007
|
| [8] | M. Fukushima, L. Qi (Eds.), Reformulation: Nonsmooth, piecewise smooth, semismooth and smoothing methods, Kluwer Academic Publishers, 1999. |
| [9] |
G. Yu, A derivative-free method for solving large-scale nonlinear systems of equations, J. Ind. Manag. Optim., 6 (2010), 149–160. https://doi.org/10.3934/jimo.2010.6.149 doi: 10.3934/jimo.2010.6.149
|
| [10] |
M. Ahookhosh, K. Amini, S. Bahrami, Two derivative-free projection approaches for systems of large-scale nonlinear monotone equations, Numer. Algor., 64 (2013), 21–42. https://doi.org/10.1007/s11075-012-9653-z doi: 10.1007/s11075-012-9653-z
|
| [11] |
G. Yuan, M. Zhang, A three-terms Polak-Ribi$\grave{e}$re-Polyak conjugate gradient algorithm for large-scale nonlinear equations, J. Comput. Appl. Math., 286 (2015), 186–195. https://doi.org/10.1016/j.cam.2015.03.014 doi: 10.1016/j.cam.2015.03.014
|
| [12] |
J. Sabi'u, A. M. Gadu, A projected hybrid conjugate gradient method for solving large-scale system of nonlinear equations, Malays. J. Comput. Appl. Math., 1 (2018), 10–20. https://doi.org/10.37231/myjcam.2018.1.2.20 doi: 10.37231/myjcam.2018.1.2.20
|
| [13] |
A. B. Abubakar, P. Kumam, An improved three-term derivative-free method for solving nonlinear equations, Comput. Appl. Math., 37 (2018), 6760–6773. https://doi.org/10.1007/s40314-018-0712-5 doi: 10.1007/s40314-018-0712-5
|
| [14] |
A. M. Awwal, P. Kumam, A. B. Abubakar, Spectral modified Polak-Ribiére-Polyak projection conjugate gradient method for solving monotone systems of nonlinear equations, Appl. Math. Comput., 362 (2019), 124514. https://doi.org/10.1016/j.amc.2019.06.028 doi: 10.1016/j.amc.2019.06.028
|
| [15] |
J. Sabi'u, A. Shah, M. Y. Waziri, M. K. Dauda, A new hybrid approach for solving large-scale monotone nonlinear equations, J. Math. Fund. Sci., 52 (2020), 17–26. https://doi.org/10.5614/j.math.fund.sci.2020.52.1.2 doi: 10.5614/j.math.fund.sci.2020.52.1.2
|
| [16] |
H. Feng, T. Li, An accelerated conjugate gradient algorithm for solving nonlinear monotone equations and image restoration problems, Math. Probl. Eng., 2020 (2020), 7945467. https://doi.org/10.1155/2020/7945467 doi: 10.1155/2020/7945467
|
| [17] |
J. K. Liu, Derivative-free spectral PRP projection method for solving nonlinear monotone equations with convex constraints (Chinese), Math. Numer. Sin., 38 (2016), 113–124. https://doi.org/10.12286/jssx.2016.2.113 doi: 10.12286/jssx.2016.2.113
|
| [18] |
D. Feng, M. Sun, X. Wang, A family of conjugate gradient methods for large-scale nonlinear equations, J. Inequal. Appl., 2017 (2017), 236. https://doi.org/10.1186/s13660-017-1510-0 doi: 10.1186/s13660-017-1510-0
|
| [19] |
J. Guo, Z. Wan, A modified spectral PRP conjugate gradient projection method for solving large-scale monotone equations and its application in compressed sensing, Math. Probl. Eng., 2019 (2019), 5261830. https://doi.org/10.1155/2019/5261830 doi: 10.1155/2019/5261830
|
| [20] |
Y. Zhou, Y. Wu, X. Li, A new hybrid prpfr conjugate gradient method for solving nonlinear monotone equations and image restoration problems, Math. Probl. Eng., 2020 (2020), 6391321. https://doi.org/10.1155/2020/6391321 doi: 10.1155/2020/6391321
|
| [21] |
Y. Hu, Y. Wang, An efficient projected gradient method for convex constrained monotone equations with applications in compressive sensing, J. Appl. Math. Phys., 8 (2020), 983–998. https://doi.org/10.4236/jamp.2020.86077 doi: 10.4236/jamp.2020.86077
|
| [22] |
H. Guan, S. Wang, A modified conjugate gradient method for solving large-scale nonlinear equations, Math. Probl. Eng. 2021 (2021), 9919595. https://doi.org/10.1155/2021/9919595 doi: 10.1155/2021/9919595
|
| [23] |
A. B. Abubakar, P. Kumam, H. Mohammad, A. H. Ibrahim, PRP-like algorithm for monotone operator equations, Japan J. Indust. Appl. Math., 38 (2021), 805–822. https://doi.org/10.1007/s13160-021-00462-2 doi: 10.1007/s13160-021-00462-2
|
| [24] |
M. Y. Waziri, K. Ahmed, A. S. Halilu, A modified PRP-type conjugate gradient projection algorithm for solving large-scale monotone nonlinear equations with convex constraint, J. Comput. Appl. Math., 407 (2022), 114035. https://doi.org/10.1016/j.cam.2021.114035 doi: 10.1016/j.cam.2021.114035
|
| [25] |
J. Sabi'u, K. O. Aremu, A. Althobaiti, A. Shah, Scaled three-term conjugate gradient methods for solving monotone equations with application, Symmetry, 14 (2022), 936. https://doi.org/10.3390/sym14050936 doi: 10.3390/sym14050936
|
| [26] |
K. Amini, P. Faramarzi, S. Bahrami, A spectral conjugate gradient projection algorithm to solve the large-scale system of monotone nonlinear equations with application to compressed sensing, Int. J. Comput. Math., 99 (2022), 2290–2307. https://doi.org/10.1080/00207160.2022.2047180 doi: 10.1080/00207160.2022.2047180
|
| [27] |
J. Barzilai, J. M. Borwein, Two-point step size gradient methods, IMA J. Numer. Anal., 8 (1988), 141–148. https://doi.org/10.1093/imanum/8.1.141 doi: 10.1093/imanum/8.1.141
|
| [28] |
E. D. Dolan, J. J. Mor$\acute{e}$, Benchmarking optimization software with performance profiles, Math. Program., 91 (2002), 201–213. https://doi.org/10.1007/s101070100263 doi: 10.1007/s101070100263
|
| [29] |
Y. Zhang, L. He, C. Hu, J. Guo, J. Li, Y. Shi, General four-step discrete-time zeroing and derivative dynamics applied to time-varying nonlinear optimization, J. Comput. Appl. Math., 347 (2019), 314–329. https://doi.org/10.1016/j.cam.2018.08.017 doi: 10.1016/j.cam.2018.08.017
|
Figures(2) / Tables(5)

Jamilu Sabi'u, Ali Althobaiti, Saad Althobaiti, Soubhagya Kumar Sahoo, Thongchai Botmart. A scaled Polak-Ribi$ \grave{e} $re-Polyak conjugate gradient algorithm for constrained nonlinear systems and motion control[J]. AIMS Mathematics, 2023, 8(2): 4843-4861. doi: 10.3934/math.2023241







 DownLoad:
DownLoad: