Non-linear behavior in building frame structures is inevitable and expected in moderate to severe seismic events. This behavior tends to be concentrated at the ends of beams and columns of moment-resisting frames. These critical regions, where plastic hinges form, are important for the global stability of the structural system. Depending on the available ductility, these mechanisms are responsible for the permanent deformations that the structure undergoes, leaving the remaining parts of the structural elements in the elastic regime, and hence in the safe zone. The importance of these mechanisms led to the search for an adequate model capable of well-capturing the non-linearity phenomena involved. The development of versatile hysteresis models with degradation features has been the aim of different studies. Hence, this paper presents a parametric study based on a smooth hysteresis model, a further modification to the well-known Bouc-Wen model, developed by Sivaselvan and Reinhorn, with a physical interpretation appropriate to the study of the non-linear behavior of civil engineering structures, particularly, building structures. Furthermore, an optimization procedure is implemented to calibrate the mentioned model's parameters, attempting to replicate the actual cyclic response of a reinforced concrete frame structure. The effect of each parameter in the hysteresis response will help on the understanding and on the possibilities of this kind of model in simulating different types of structural systems or different materials.
Citation: Pedro Folhento, Rui Barros, Manuel Braz-Césa. Parametric study on a Bouc-Wen model with degradation features for the study of cyclic behavior of a reinforced concrete frame[J]. AIMS Materials Science, 2021, 8(6): 899-916. doi: 10.3934/matersci.2021055
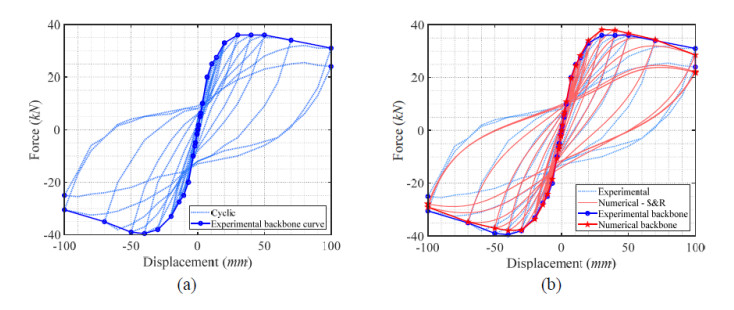
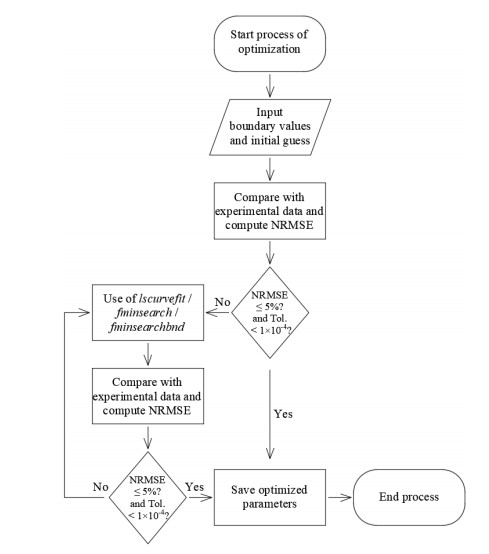
Non-linear behavior in building frame structures is inevitable and expected in moderate to severe seismic events. This behavior tends to be concentrated at the ends of beams and columns of moment-resisting frames. These critical regions, where plastic hinges form, are important for the global stability of the structural system. Depending on the available ductility, these mechanisms are responsible for the permanent deformations that the structure undergoes, leaving the remaining parts of the structural elements in the elastic regime, and hence in the safe zone. The importance of these mechanisms led to the search for an adequate model capable of well-capturing the non-linearity phenomena involved. The development of versatile hysteresis models with degradation features has been the aim of different studies. Hence, this paper presents a parametric study based on a smooth hysteresis model, a further modification to the well-known Bouc-Wen model, developed by Sivaselvan and Reinhorn, with a physical interpretation appropriate to the study of the non-linear behavior of civil engineering structures, particularly, building structures. Furthermore, an optimization procedure is implemented to calibrate the mentioned model's parameters, attempting to replicate the actual cyclic response of a reinforced concrete frame structure. The effect of each parameter in the hysteresis response will help on the understanding and on the possibilities of this kind of model in simulating different types of structural systems or different materials.

| [1] | Krasnosel'skij MA, Pokrovskij AV (1983) Systems with Hysteresis, Berlin, Germany: Springer. |
| [2] | Visintin A (1994) Differential Models of Hysteresis. Berlin Heidelberg, Germany: Springer-Verlag. |
| [3] | Apostolos B (2017) Effects of strength hardening, stiffness degradation, strength deterioration and pinching on the seismic response of SDoF systems[Master's thesis]. Delft University of Technology, The Netherlands. |
| [4] | Federal Emergency Management Agency (FEMA) (2009) Effects of strength and stiffness degradation on seismic response, P440A, California. |
| [5] | Otani S (2002) Nonlinear earthquake response analysis of reinforced concrete buildings. University of Tokyo, Japan. |
| [6] |
Vaiana N, Sessa S, Marmo F, et al. (2018) A class of uniaxial phenomenological models for simulating hysteretic phenomena in rate-independent mechanical systems and materials. Nonlinear Dynam 93: 1647-1669. doi: 10.1007/s11071-018-4282-2

|
| [7] |
Vaiana N, Sessa S, Rosati L (2021) A generalized class of uniaxial rate-independent models for simulating asymmetric mechanical hysteresis phenomena. Mech Syst Signal Pr 146: 106984. doi: 10.1016/j.ymssp.2020.106984
|
| [8] |
Vaiana N, Capuano R, Sessa S, et al. (2021) Nonlinear dynamic analysis of seismically base-isolated structures by a novel openSees hysteretic material model. Appl Sci 11: 900. doi: 10.3390/app11030900
|
| [9] |
Do T, Filippou F (2017) A damage model for structures with degrading response. Earthq Eng Struct D 47: 311-332. doi: 10.1002/eqe.2952
|
| [10] |
Mazza F (2019) A plastic-damage hysteretic model to reproduce strength stiffness degradation. B Earthq Eng 17: 3517-3544. doi: 10.1007/s10518-019-00606-3
|
| [11] |
Sivaselvan M, Reinhorn A (2000) Hysteretic models for deteriorating inelastic structures. J Eng Mech 126: 633-640. doi: 10.1061/(ASCE)0733-9399(2000)126:6(633)
|
| [12] | Clough RW (1966) Effects of stiffness degradation on earthquake ductility requirement, UCB/SESM 1966/16, University of California, Berkeley, USA. |
| [13] | Nielsen N, Imbeault F (1971) Validity of various hysteretic systems, Proceedings of the 3rd Japan National Conference on Earthquake Engineering, 707-714. |
| [14] | Otani S (1981) Hysteresis model of reinforced concrete for earthquake response analysis. J Fac Eng 36: 407-441. |
| [15] | Fukada Y (1969) Study on the restoring force characteristics of reinforced concrete buildings, Proceedings Kanto Branch Symposium, Architectural Institute of Japan, 40: 121-124 (in Japanese). |
| [16] |
Takeda T, Sozen M, Nielsen N (1970) Reinforced concrete response to simulated earthquakes. J Struct Div 96: 2557-2573. doi: 10.1061/JSDEAG.0002765
|
| [17] | Takeda T, Sozen MA, Nielsen NN (1971) Reinforced concrete response to simulated earthquakes, OHBAYASHI-GUMI Technical Research Report 5, 19-26, Tokyo, Japan. |
| [18] | Eto H, Takeda T (1973) Elasto plastic earthquake response analysis of reinforced concrete frame structure, Architectural Institute of Japan, 1261-1262, Tokyo, Japan (in Japanese). |
| [19] | Kabeyasawa T, Shiohara H, Otani S, et al. (1983) Analysis of the full-scale seven-story reinforced concrete test structure. J Fac Eng 37: 431-478. |
| [20] | Park Y, Reinhorn A, Kunnath S (1987) IDARC: Inelastic Damage Analysis of Reinforced Concrete Frame-Shear-Wall Structures, NCEER-87-0008, National Center for Earthquake Engineering Research, University at Buffalo, State University of New York, Buffalo, New York, USA. |
| [21] | Costa AG, Costa AC (1987) Modelo histerético das relações forças-deslocamentos adequado à análise sísmica de estruturas, Laboratório Nacional de Engenharia Civil (LNEC), Lisbon, Portugal. |
| [22] | Rodrigues H, Varum H, Costa A (2005) Modelo numérico não-linear para painéis de alvenaria de enchimento em pórticos de betão armado, Ⅶ Congreso de Métodos Numéricos en Ingeniería (SEMINI) and Ⅸ Congresso Nacional de Mecânica Aplicada e Computacional (APMTAC), 381: 4-7, Granada, Spain. |
| [23] |
Ismail M, Ikhouane F, Rodellar J (2009) The hysteresis Bouc-Wen model, a survey. Arch Comput Method E 16: 161-188. doi: 10.1007/s11831-009-9031-8
|
| [24] | Sivaselvan M, Reinhorn A (1999) Hysteretic models for cyclic behavior of deteriorating inelastic structures, MCEER-99-0018, Multidisciplinary Center for Earthquake Engineering Research, New York. |
| [25] | Bouc R (1968) Forced vibration of mechanical systems with hysteresis, In: Rupakhety R, Olafsson S, Bessaon B, Proceedings of the Fourth Conference on Non-linear Oscillation, Prague: Academia. |
| [26] | Wen Y (1976) Method for random vibration of hysteretic systems. J Eng Mech-ASCE 102: 249-263. |
| [27] |
Wen Y (1980) Equivalent linearization for hysteretic system under random excitation. J Appl Mech 47: 150-154. doi: 10.1115/1.3153594
|
| [28] |
Baber TT, Noori MN (1985) Random vibration of degrading pinching systems. J Eng Mech-ASCE 11: 1010-1026. doi: 10.1061/(ASCE)0733-9399(1985)111:8(1010)
|
| [29] |
Foliente G (1995) Hysteresis modeling of wood joints and structural systems. J Struct Eng 121: 1013-1022. doi: 10.1061/(ASCE)0733-9445(1995)121:6(1013)
|
| [30] | Reinhorn A, Mandan A, Valles R, et al. (1995) Modeling of masonry infill panels for structural analysis, NCEER-95-0018, National Center for Earthquake Engineering, USA. |
| [31] | The MathWorks, Inc, MATLAB R2019a 9.6.0.1072779, Natick, Massachusetts, USA. |
| [32] | Pires F (1990) Influência das paredes de alvenaria no comportamento de estruturas reticuladas de betão armado sujeitas a acções horizontais[PhD Thesis]. LNEC, Lisboa. |
| [33] | Braz-César M, Oliveira D, Barros R (2008) Comparison of cyclic response of reinforced concrete infilled frames with experimental results. 14th World Conference on Earthquake Engineering, Beijing, China. |
| [34] |
Ray T, Reinhorn A (2014) Enhanced smooth hysteretic model with degrading properties. J Struct Eng 140: 04013028. doi: 10.1061/(ASCE)ST.1943-541X.0000798
|
| [35] |
Ma F, Zhang H, Bockstedte A, et al. (2004) Parameter analysis of the differential model of hysteresis. J Appl Mech 71: 342-349. doi: 10.1115/1.1668082
|
| [36] | Charalampakis A (2010) Parameters of Bouc-Wen hysteretic model revisited. 9th HSTAM International Congress on Mechanics, Cyprus. |
| [37] | Braz-César M, Barros R (2013) Experimental and numerical analysis of MR dampers. 4th ECCOMAS Thematic Conference on Computational Methods in Structural Dynamics and Earthquake Engineering, Greece. |
| [38] |
Tsiatas GC, Charalampakis AE (2018) A new hysteretic nonlinear energy sink (HNES). Commun Nonlinear Sci 60: 1-11. doi: 10.1016/j.cnsns.2017.12.014
|
| [39] |
Charalampakis A, Tsiatas G (2018) Effects of hysteresis and negative stiffness on seismic response rreduction: A case study based on the 1999 Athens, Greece earthquake. Front Built Environ 4: 00023. doi: 10.3389/fbuil.2018.00023
|
| [40] | D'Errico J, fminsearchbnd, fminsearchcon. MATLAB Central File Exchange, 2021. Available from: https://www.mathworks.com/matlabcentral/fileexchange/8277-fminsearchbnd-fminsearchcon. |

Figures(15)

Pedro Folhento, Rui Barros, Manuel Braz-Césa. Parametric study on a Bouc-Wen model with degradation features for the study of cyclic behavior of a reinforced concrete frame[J]. AIMS Materials Science, 2021, 8(6): 899-916. doi: 10.3934/matersci.2021055







 DownLoad:
DownLoad: