In the rapidly evolving landscape of the digital age, the call for intelligent governance has become paramount. This study offers a nuanced exploration of global sustainable governance, integrating the Seven Pillars of Sustainability (7PS) framework and innovation culture. Utilizing structural equation modeling and data from diverse government organizations, this research empirically established the 7PS framework's pivotal role in enhancing organizational sustainability, supported by a robust 95% confidence level. Notably, it unveiled the transformative influence of innovation culture in amplifying the 7PS's impact. The methodological innovation lies in strategically applying the fuzzy analytic hierarchy process (AHP), assigning priority weights to 7PS criteria, and identifying culture as the linchpin. This approach provided a robust framework for dissecting the complex interplay of emerging technologies, sustainable engineering, and cybersecurity. The study delves into the X.0 wave/age (X.0 = 5.0) theory, offering insights into the intricate dynamics of innovation, sustainability, and governance. Beyond academic discourse, this research informs practical strategies globally, particularly for small and medium-sized enterprises (SMEs) transitioning to SME 5.0/hybrid SMEs. Emphasizing inclusivity and diversity as catalysts for innovation, it scrutinizes contemporary challenges amid technological evolution and cybersecurity threats. Functioning as a visionary compass, the study elucidates the path to a 7PS sustainable future. It signifies a paradigm shift, transcending boundaries between knowledge domains. The fusion of the 7PS framework, X.0 wave theory, and fuzzy AHP navigates global governance, digital resilience, and cybersecurity, offering a transformative roadmap. This research contributes by substantiating the pivotal role of culture in emerging technologies, augmenting global tech-sustainable governance, fortifying digital resilience, and safeguarding cybersecurity.
Citation: Hamid Doost Mohammadian, Omid Alijani, Mohammad Rahimi Moghadam, Behnam Ameri. Navigating the future by fuzzy AHP method: Enhancing global tech-sustainable governance, digital resilience, & cybersecurity via the SME 5.0, 7PS framework & the X.0 Wave/Age theory in the digital age[J]. AIMS Geosciences, 2024, 10(2): 371-398. doi: 10.3934/geosci.2024020
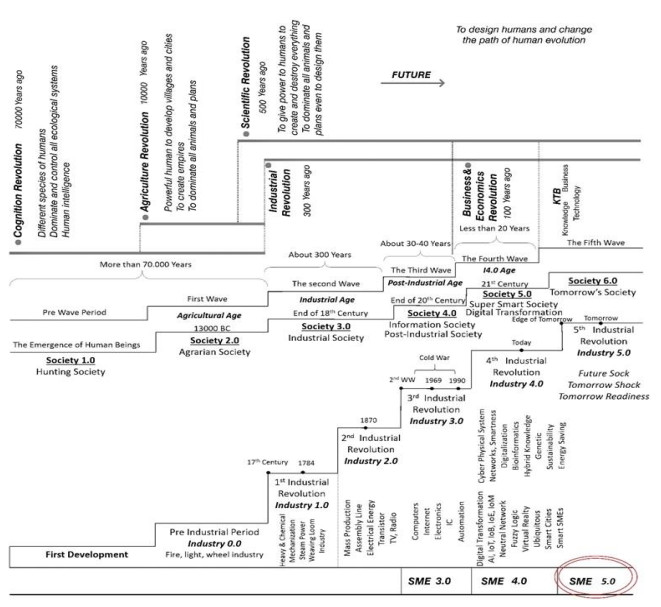
In the rapidly evolving landscape of the digital age, the call for intelligent governance has become paramount. This study offers a nuanced exploration of global sustainable governance, integrating the Seven Pillars of Sustainability (7PS) framework and innovation culture. Utilizing structural equation modeling and data from diverse government organizations, this research empirically established the 7PS framework's pivotal role in enhancing organizational sustainability, supported by a robust 95% confidence level. Notably, it unveiled the transformative influence of innovation culture in amplifying the 7PS's impact. The methodological innovation lies in strategically applying the fuzzy analytic hierarchy process (AHP), assigning priority weights to 7PS criteria, and identifying culture as the linchpin. This approach provided a robust framework for dissecting the complex interplay of emerging technologies, sustainable engineering, and cybersecurity. The study delves into the X.0 wave/age (X.0 = 5.0) theory, offering insights into the intricate dynamics of innovation, sustainability, and governance. Beyond academic discourse, this research informs practical strategies globally, particularly for small and medium-sized enterprises (SMEs) transitioning to SME 5.0/hybrid SMEs. Emphasizing inclusivity and diversity as catalysts for innovation, it scrutinizes contemporary challenges amid technological evolution and cybersecurity threats. Functioning as a visionary compass, the study elucidates the path to a 7PS sustainable future. It signifies a paradigm shift, transcending boundaries between knowledge domains. The fusion of the 7PS framework, X.0 wave theory, and fuzzy AHP navigates global governance, digital resilience, and cybersecurity, offering a transformative roadmap. This research contributes by substantiating the pivotal role of culture in emerging technologies, augmenting global tech-sustainable governance, fortifying digital resilience, and safeguarding cybersecurity.

| [1] |
Mardani A, Zavadskas EK, Streimikiene D, et al. (2016) Using fuzzy multiple criteria decision making approaches for evaluating energy saving technologies and solutions in five star hotels: A new hierarchical framework. Energy 117: 131–148. https://doi.org/10.1016/j.energy.2016.10.076 doi: 10.1016/j.energy.2016.10.076

|
| [2] |
Dobson A (2007) Environmental citizenship: Towards sustainable development. Sustainable Dev 15: 276–285. https://doi.org/10.1002/sd.344 doi: 10.1002/sd.344
|
| [3] |
Littig B, Griessler E (2005) Social sustainability: a catchword between political pragmatism and social theory. Int J Sust Dev 8: 65–79. https://doi.org/10.1504/IJSD.2005.007375 doi: 10.1504/IJSD.2005.007375
|
| [4] |
Hopwood B, Mellor M, O'Brien G (2005) Sustainable development: mapping different approaches. Sustainable Dev 13: 38–52. https://doi.org/10.1002/sd.244 doi: 10.1002/sd.244
|
| [5] |
Dobin C (2008) Measuring innovation culture in organizations: The development of a generalized innovation culture construct using exploratory factor analysis. Eur J Innov Manag 11: 539–559. https://doi.org/10.1108/14601060810911156 doi: 10.1108/14601060810911156
|
| [6] |
Eizenberg E, Jabareen Y (2017) Social sustainability: A new conceptual framework. Sustainability 9: 68. https://doi.org/10.3390/su9010068 doi: 10.3390/su9010068
|
| [7] |
Mohammadian HD, Langari ZG, Kamalian AR, et al. (2023) Promoting sustainable global innovative smart governance through the 5 th wave theory, via Fuzzy AHP for future SMEs (SME 5.0/hybrid SMEs). AIMS Geosci 9: 123–152. https://doi.org/10.3934/geosci.2023008 doi: 10.3934/geosci.2023008
|
| [8] |
Goyal S, Garg D, Luthra S (2021) Sustainable production and consumption: Analysing barriers and solutions for maintaining green tomorrow by using fuzzy-AHP—fuzzy-TOPSIS hybrid framework. Environ Dev Sustain 23: 16934–16980. https://doi.org/10.1007/s10668-021-01357-5 doi: 10.1007/s10668-021-01357-5
|
| [9] |
Jamwal A, Agrawal R, Sharma M (2023) Challenges and opportunities for manufacturing SMEs in adopting industry 4.0 technologies for achieving sustainability: Empirical evidence from an emerging economy. Oper Manag Res. https://doi.org/10.1007/s12063-023-00428-2 doi: 10.1007/s12063-023-00428-2
|
| [10] | Mohammadian HD, Langari ZG, Castro M, et al. (2022) A Study of MOOCs Project (MODE IT), Techniques, and Know How-Do How Best Practices and Lessons from the Pandemic through the Tomorrow Age Theory. 2022 IEEE Learning with MOOCS (LWMOOCS), 179–191. https://doi.org/10.1109/LWMOOCS53067.2022.9927790 |
| [11] | Mohammadian HD, Wittberg V, Castro M, et al. (2020) The 5th Wave and i-Sustainability Plus Theories as Solutions for SocioEdu Consequences of Covid-19. 2020 IEEE Learning With MOOCS (LWMOOCS), 118–123. https://doi.org/10.1109/LWMOOCS50143.2020.9234360 |
| [12] | Mohammadian HD, Shahhoseini H, Castro M, et al. (2020) Digital transformation in academic society and innovative ecosystems in the world beyond Covid19-pandemic with using 7PS model for IoT. 2020 IEEE Learning With MOOCS (LWMOOCS), 112–117. https://doi.org/10.1109/LWMOOCS50143.2020.9234328 |
| [13] | Mohammadian HD, Langari ZG, Castro M, et al. (2022) Smart Governance for Educational Sustainability: Hybrid SMEs & the 5 th wave theory Towards Mapping the Future Education in Post-Covid Era. 2022 IEEE Global Engineering Education Conference (EDUCON), 1916–1926. https://doi.org/10.1109/EDUCON52537.2022.9766580 |
| [14] | Mohammadian HD, Bakhtiari AK, Castro M, et al. (2022) The Development of a Readiness Assessment Framework for Tomorrow's SMEs/SME 5.0 for Adopting the Educational Components of future of I4.0. 2022 IEEE Global Engineering Education Conference (EDUCON), 1699–1708. https://doi.org/10.1109/EDUCON52537.2022.9766580 |
| [15] | Mohammadian HD, Castro M, Wittberg V (2022) Doost Sme Ranking Model (DSRM) for the Edu. SMEs Development, based on Guter Mittelstand, MOOCs & Related Projects as German Best Practice Towards: Future Edu Readiness to Achieve SME 5.0. 2022 IEEE Learning with MOOCS (LWMOOCS), 161–178. https://doi.org/10.1109/LWMOOCS53067.2022.9927831 |
| [16] | Mohammadian HD, Langari ZG, Wittberg V (2022) Cyber Government for Sustainable Governance: Examining Solutions to Tomorrow's Crises and Implications through the 5 th wave theory, Edu 5.0 concept, and 9PSG model. 2022 IEEE Global Engineering Education Conference (EDUCON), 1737–1746. https://doi.org/10.1109/EDUCON52537.2022.9766774 |
| [17] | Mohammadian HD (2022) Mapping the Future SMEs' HR Competencies via IoE Technologies and 7PS Model Through the Fifth Wave Theory, Chemma, N, El Amine Abdelli M, Awasthi A, Mogaji E, Ed., Management and Information Technology in the Digital Era: Challenges and Perspectives, Emerald Publishing Limited, 141–171. https://doi.org/10.1108/S1877-636120220000029010 |
| [18] |
Spangenberg JH (2004) Reconciling sustainability and growth: criteria, indicators, policies. Sustainable Dev 12: 74–86. https://doi.org/10.1002/sd.229 doi: 10.1002/sd.229
|
| [19] |
Hervás-Oliver JL, Parrilli MD, Rodríguez-Pose A, et al. (2021) The drivers of SME innovation in the regions of the EU. Res Policy 50: 104316. https://doi.org/10.1016/j.respol.2021.104316 doi: 10.1016/j.respol.2021.104316
|
| [20] |
Shi L, Han L, Yang F, et al. (2019) The evolution of sustainable development theory: Types, goals, and research prospects. Sustainability 11: 7158. https://doi.org/10.3390/su11247158 doi: 10.3390/su11247158
|
| [21] |
Camilleri MA (2022) Strategic attributions of corporate social responsibility and environmental management: The business case for doing well by doing good! Sustainable Dev 30: 409–422. https://doi.org/10.1002/sd.2256 doi: 10.1002/sd.2256
|
| [22] |
Porter ME, Linde CVD (1995) Toward a new conception of the environment-competitiveness relationship. J Econ Perspect 9: 97–118. https://doi.org/10.1257/jep.9.4.97 doi: 10.1257/jep.9.4.97
|
| [23] |
Tang M, Walsh G, Lerner D, et al. (2018) Green innovation, managerial concern and firm performance: An empirical study. Bus Strateg Environ 27: 39–51. https://doi.org/10.1002/bse.1981 doi: 10.1002/bse.1981
|
| [24] |
Dempsey N, Bramley G, Power S, et al. (2011) The social dimension of sustainable development: Defining urban social sustainability. Sustainable Dev 19: 289–300. https://doi.org/10.1002/sd.417 doi: 10.1002/sd.417
|
| [25] |
Takalo SK, Tooranloo HS, Shahabaldini Parizi Z (2021) Green innovation: A systematic literature review. J Cleaner Prod 279: 122474. https://doi.org/10.1016/j.jclepro.2020.122474 doi: 10.1016/j.jclepro.2020.122474
|
| [26] | El Amine Abdelli M, Sghaier A, Akbaba A, et al. (2023) Smart Cities for Sustainability: Approaches and Solutions, Emerald Publishing Limited, Leeds, 32: 233–242. https://doi.org/10.1108/S1877-636120230000033017 |





Figures(6) / Tables(1)

Hamid Doost Mohammadian, Omid Alijani, Mohammad Rahimi Moghadam, Behnam Ameri. Navigating the future by fuzzy AHP method: Enhancing global tech-sustainable governance, digital resilience, & cybersecurity via the SME 5.0, 7PS framework & the X.0 Wave/Age theory in the digital age[J]. AIMS Geosciences, 2024, 10(2): 371-398. doi: 10.3934/geosci.2024020







 DownLoad:
DownLoad: