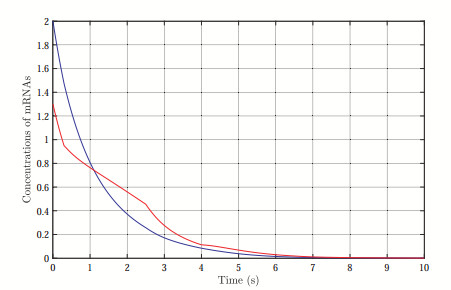
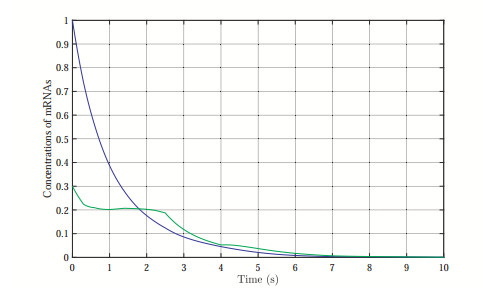
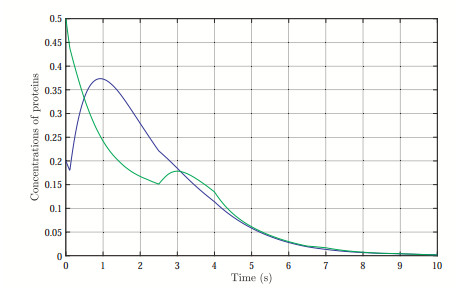
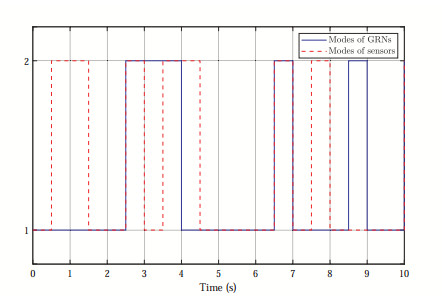
In this paper, the distributed state estimation problem of genetic regulatory networks (GRNs) with hidden Markovian jumping parameters (HMJPs) is explored. Furthermore, in order to improve the communication efficiency among state estimation sensors, the event-triggered strategy is employed in the distributed framework for sensor networks. Particularly, by considering the fact that the true modes are always unaccessible, a novel nonsynchronous state estimation (NSE) strategy is utilized based on observed hidden mode information. By means of Lyapunov-Krasovski method, sufficient stochastic state estimation analysis and synthesis results are established, such that the concentrations of mRNA and protein in GRNs can be both well estimated by convex optimization. Finally, an illustrative example with relevant simulations results is provided to validate the applicability and effectiveness of the developed state estimation approach.
Citation: Chao Ma, Yanfeng Lu. Distributed nonsynchronous event-triggered state estimation of genetic regulatory networks with hidden Markovian jumping parameters[J]. Mathematical Biosciences and Engineering, 2022, 19(12): 13878-13910. doi: 10.3934/mbe.2022647
In this paper, the distributed state estimation problem of genetic regulatory networks (GRNs) with hidden Markovian jumping parameters (HMJPs) is explored. Furthermore, in order to improve the communication efficiency among state estimation sensors, the event-triggered strategy is employed in the distributed framework for sensor networks. Particularly, by considering the fact that the true modes are always unaccessible, a novel nonsynchronous state estimation (NSE) strategy is utilized based on observed hidden mode information. By means of Lyapunov-Krasovski method, sufficient stochastic state estimation analysis and synthesis results are established, such that the concentrations of mRNA and protein in GRNs can be both well estimated by convex optimization. Finally, an illustrative example with relevant simulations results is provided to validate the applicability and effectiveness of the developed state estimation approach.

| [1] |
L. Chen, K. Aihara, Stability of genetic regulatory networks with time delay, IEEE Trans. Circuits Syst. I Fundam. Theory Appl., (2002), 602–608. https://doi.org/10.1109/TCSI.2002.1001949 doi: 10.1109/TCSI.2002.1001949

|
| [2] |
S Pandiselvi, R Raja, Q. Zhu, G. Rajchakit, A state estimation $h_{\infty}$ issue for discrete-time stochastic impulsive genetic regulatory networks in the presence of leakage, multiple delays and markovian jumping parameters, J. Franklin Inst., 355 (2018), 2735–2761. https://doi.org/10.1016/j.jfranklin.2017.12.036 doi: 10.1016/j.jfranklin.2017.12.036
|
| [3] |
H. Shen, S. Huo, H. Yan, J. Park, V. Sreeram, Distributed dissipative state estimation for markov jump genetic regulatory networks subject to round-robin scheduling, IEEE Trans. Neural Networks Learn. Syst., 31 (2019), 762–771. https://doi.org/10.1109/TNNLS.2019.2909747 doi: 10.1109/TNNLS.2019.2909747
|
| [4] |
H. D. Jong, Modeling and simulation of genetic regulatory systems: a literature review, J. Comput. Biol., 9 (2002), 67–103. https://doi.org/10.1089/10665270252833208 doi: 10.1089/10665270252833208
|
| [5] |
N. Vijesh, S. K. Chakrabarti, J. Sreekumar, Modeling of gene regulatory networks: A review, J. Biomed. Sci. Eng., 6 (2013), 223. http://dx.doi.org/10.4236/jbise.2013.62A027 doi: 10.4236/jbise.2013.62A027
|
| [6] |
D. Yue, Z. Guan, J. Li, F. Liu, J. W. Xiao, G. Ling, Stability and bifurcation of delay-coupled genetic regulatory networks with hub structure, J. Franklin Inst., 356 (2019), 2847–2869. https://doi.org/10.1016/j.jfranklin.2018.11.030 doi: 10.1016/j.jfranklin.2018.11.030
|
| [7] |
J. Liang, J. Lam, Robust state estimation for stochastic genetic regulatory networks, Int. J. Syst. Sci., 41 (2010), 47–63. https://doi.org/10.1080/00207720903141434 doi: 10.1080/00207720903141434
|
| [8] |
W. Guo, G. Yang, W. Wu, L. He, M. Sun, A parallel attractor finding algorithm based on boolean satisfiability for genetic regulatory networks, PloS One, 9 (2014), e94258. https://doi.org/10.1371/journal.pone.0094258 doi: 10.1371/journal.pone.0094258
|
| [9] |
Y. Zhu, Q. Zhang, Z. Wei, L. Zhang, Robust stability analysis of markov jump standard genetic regulatory networks with mixed time delays and uncertainties, Neurocomputing, 110 (2013), 44–50. https://doi.org/10.1016/j.neucom.2012.09.033 doi: 10.1016/j.neucom.2012.09.033
|
| [10] |
C. Ma, Q. Zeng, L. Zhang, Y. Zhu, Passivity and passification for markov jump genetic regulatory networks with time-varying delays, Neurocomputing, 136 (2014), 321–326. https://doi.org/10.1016/j.neucom.2013.12.028 doi: 10.1016/j.neucom.2013.12.028
|
| [11] |
S Lakshmanan, F. A Rihan, R Rakkiyappan, J. H. Park. Stability analysis of the differential genetic regulatory networks model with time-varying delays and markovian jumping parameters, Nonlinear Anal. Hybrid Syst., 14 (2014), 1–15. https://doi.org/10.1016/j.nahs.2014.04.003 doi: 10.1016/j.nahs.2014.04.003
|
| [12] |
J. Liang, J. Lam, Z. Wang, State estimation for markov-type genetic regulatory networks with delays and uncertain mode transition rates, Phys. Lett. A, 373 (2009), 4328–4337. https://doi.org/10.1016/j.physleta.2009.09.055 doi: 10.1016/j.physleta.2009.09.055
|
| [13] |
Y. Sun, G. Feng, J. Cao, Stochastic stability of markovian switching genetic regulatory networks, Phys. Lett. A, 373 (2009), 1646–1652. https://doi.org/10.1016/j.physleta.2009.03.017 doi: 10.1016/j.physleta.2009.03.017
|
| [14] |
Z. H. Guan, D. Yue, B. Hu, T. Li, F. Liu, Cluster synchronization of coupled genetic regulatory networks with delays via aperiodically adaptive intermittent control, IEEE Trans. NanoBioscience, 16 (2017), 585–599. https://doi.org/10.1109/TNB.2017.2738324 doi: 10.1109/TNB.2017.2738324
|
| [15] |
B. Cai, R. Weng, R. X. Zhang, Y. Liang, L. Zhang, Stabilization of a class of fuzzy stochastic jump systems with partial information on jump and sojourn parameters, Sci. China Technol. Sci., 64 (2021), 353–363. https://doi.org/10.1007/s11431-019-1514-8 doi: 10.1007/s11431-019-1514-8
|
| [16] |
J. Cheng, Y. Shan, J. Cao, J. Park, Nonstationary control for t–s fuzzy markovian switching systems with variable quantization density, IEEE Trans. Fuzzy Syst., 29 (2020), 1375–1385. https://doi.org/10.1109/TFUZZ.2020.2974440 doi: 10.1109/TFUZZ.2020.2974440
|
| [17] |
J. Cheng, J. H. Park, X. Zhao, H. R. Karimi, J. Cao, Quantized nonstationary filtering of networked markov switching rsnss: A multiple hierarchical structure strategy, IEEE Trans. Autom. Control, 65 (2019), 4816–4823. https://doi.org/10.1109/TAC.2019.2958824 doi: 10.1109/TAC.2019.2958824
|
| [18] |
M. Ogura, A. Cetinkaya, T. Hayakawa, V. M. Preciado, State-feedback control of markov jump linear systems with hidden-markov mode observation, Automatica, 89 (2018), 65–72. https://doi.org/10.1016/j.automatica.2017.11.022 doi: 10.1016/j.automatica.2017.11.022
|
| [19] |
Z. G. Wu, P. Shi, Z. Shu, H. Su, R. Lu, Passivity-based asynchronous control for markov jump systems, IEEE Trans. Autom. Control, 62 (2016), 2020–2025. https://doi.org/10.1109/TAC.2016.2593742 doi: 10.1109/TAC.2016.2593742
|
| [20] |
H. Qi, S. S. Iyengar, K. Chakrabarty, Distributed sensor networks—a review of recent research, J. Franklin Inst., 338 (2001), 655–668. https://doi.org/10.1016/S0016-0032(01)00026-6 doi: 10.1016/S0016-0032(01)00026-6
|
| [21] |
K. Shen, Z. Jing, P. Dong, A consensus nonlinear filter with measurement uncertainty in distributed sensor networks, IEEE Signal Process. Lett., 24 (2017), 1631–1635. https://doi.org/10.1109/LSP.2017.2751611 doi: 10.1109/LSP.2017.2751611
|
| [22] |
X. Wang, G. P. Jiang, H. Su, X. Wang, Robust global coordination of networked systems with input saturation and external disturbances, IEEE Transa. Syst. Man Cybern. Syst., 51 (2020), 7788–7800. https://doi.org/10.1109/TSMC.2020.2980295 doi: 10.1109/TSMC.2020.2980295
|
| [23] |
H. Xu, S. Liu, B. Wang, J. Wang, Distributed-observer-based distributed control law for affine nonlinear systems and its application on interconnected cruise control of intelligent vehicles, IEEE Trans. Intell. Veh., 2022 (2022), forthcoming. https://doi.org/10.1109/TIV.2022.3163773. doi: 10.1109/TIV.2022.3163773
|
| [24] |
X. Zhang, K. Hengster-Movrić, M. Šebek, W. Desmet, C. Faria, Distributed observer and controller design for spatially interconnected systems, IEEE Trans. Control Syst. Technol., 27 (2017), 1–13. https://doi.org/10.1109/TCST.2017.2769019 doi: 10.1109/TCST.2017.2769019
|
| [25] |
K. Liu, Y. Chen, Z. Duan, J. Lü, Cooperative output regulation of lti plant via distributed observers with local measurement, IEEE Trans. Cybern., 48 (2017), 2181–2191. https://doi.org/10.1109/TCYB.2017.2728812 doi: 10.1109/TCYB.2017.2728812
|
| [26] |
B. Huang, Y. Zou, Z. Meng, Distributed-observer-based nash equilibrium seeking algorithm for quadratic games with nonlinear dynamics, IEEE Trans. Syst. Man Cybern. Syst., 51 (2020), 7260–7268. https://doi.org/10.1109/TSMC.2020.2968127 doi: 10.1109/TSMC.2020.2968127
|
| [27] |
H. Xu, J. Wang, B. Wang, H. Wang, I. Brahmia, An improved distributed nonlinear observers for leader-following consensus via differential geometry approach, IEEE Trans. Syst. Man Cybern. Syst., 2021 (2021), forthcoming. https://doi.org/10.1109/TSMC.2021.3136207 doi: 10.1109/TSMC.2021.3136207
|
| [28] |
X. Ge, Q. L. Han, X. M. Zhang, L. Ding, F. Yang, Distributed event-triggered estimation over sensor networks: A survey, IEEE Trans. Cybern., 50 (2019), 1306–1320. https://doi.org/10.1109/TCYB.2019.2917179 doi: 10.1109/TCYB.2019.2917179
|
| [29] |
W. Li, Y. Jia, J. Du, Event-triggered kalman consensus filter over sensor networks, IET Control Theory Appl., 10 (2015), 103–110. https://doi.org/10.1049/iet-cta.2015.0508 doi: 10.1049/iet-cta.2015.0508
|
| [30] |
C. Deng, C. Wen, J. Huang, X. M. Zhang, Y. Zou, Distributed observer-based cooperative control approach for uncertain nonlinear mass under event-triggered communication, IEEE Trans. Autom. Control, 67 (2021), 2669–2676. https://doi.org/10.1109/TAC.2021.3090739 doi: 10.1109/TAC.2021.3090739
|
| [31] |
X. Wang, H. Su, X. Wang, G. Chen, Fully distributed event-triggered semiglobal consensus of multi-agent systems with input saturation, IEEE Trans. Ind. Electron., 64 (2016), 5055–5064. https://doi.org/10.1109/TIE.2016.2642879 doi: 10.1109/TIE.2016.2642879
|
| [32] |
S. Bosse, A. Lechleiter, A hybrid approach for structural monitoring with self-organizing multi-agent systems and inverse numerical methods in material-embedded sensor networks, Mechatronics, 34 (2016), 12–37. https://doi.org/10.1016/j.mechatronics.2015.08.005 doi: 10.1016/j.mechatronics.2015.08.005
|
| [33] |
P. Gil, H. Martins, F. Januário, Detection and accommodation of outliers in wireless sensor networks within a multi-agent framework, Appl. Soft Comput., 42 (2016), 204–214. https://doi.org/10.1016/j.asoc.2015.12.042 doi: 10.1016/j.asoc.2015.12.042
|
| [34] |
P. Park, J. W. Ko, C. Jeong, Reciprocally convex approach to stability of systems with time-varying delays, Automatica, 47 (2011), 235–238. https://doi.org/10.1016/j.automatica.2010.10.014 doi: 10.1016/j.automatica.2010.10.014
|
| [35] |
S. Dong, W. Ren, Z. G. Wu, H. Su, $h_{\infty}$ output consensus for markov jump multiagent systems with uncertainties, IEEE Trans. Cybern., 50 (2018), 2264–2273. https://doi.org/10.1109/TCYB.2018.2884762 doi: 10.1109/TCYB.2018.2884762
|

Figures(7)

Chao Ma, Yanfeng Lu. Distributed nonsynchronous event-triggered state estimation of genetic regulatory networks with hidden Markovian jumping parameters[J]. Mathematical Biosciences and Engineering, 2022, 19(12): 13878-13910. doi: 10.3934/mbe.2022647







 DownLoad:
DownLoad: