Citation: M. P. Cooper, C. A. Griffiths, K. T. Andrzejewski, C. Giannetti. Motion optimisation for improved cycle time and reduced vibration in robotic assembly of electronic components[J]. AIMS Electronics and Electrical Engineering, 2019, 3(3): 274-289. doi: 10.3934/ElectrEng.2019.3.274

| [1] |
Crama Y, Flippo OE, Van De Klundert J, et al. (1997) The assembly of printed circuit boards: A case with multiple machines and multiple board types. Eur J Oper Res 98: 457–472. doi: 10.1016/S0377-2217(96)00228-7

|
| [2] |
Crama Y, Van De Klundert J and Spieksman F (2002) Production planning problems in printed circuit board assembly. Discrete Appl Math 123: 339–361. doi: 10.1016/S0166-218X(01)00345-6
|
| [3] |
Moghaddam M and Nof SY (2016) Parallelism of Pick-and Place operations by multi-gripper robotic arms. Robot Com-Int Manuf 42: 135–146. doi: 10.1016/j.rcim.2016.06.004
|
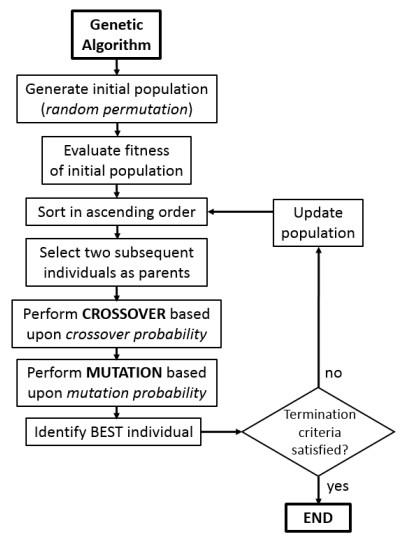
| [4] | Holland JH (1975) Adaptation in natural and artificial systems: An introductory analysis with applications to biology, control, and artificial intelligence. University of Michigan Press. |
| [5] |
Hong DS and Cho HS (1999) A genetic-algorithm-based approach to the generation of robotic assembly sequences. Control Eng Pract 7: 151–159. doi: 10.1016/S0967-0661(98)00177-4
|
| [6] |
Andrzejewski KT, Cooper MP, Griffiths CA, et al. (2018) Optimisation process for robotic assembly of electronic components. The International Journal of Advanced Manufacturing Technology 99: 2523–2535. doi: 10.1007/s00170-018-2645-y
|
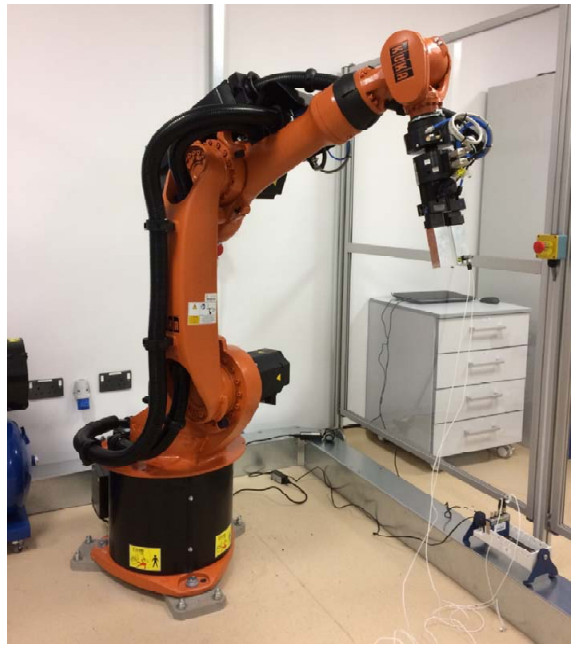
| [7] | KUKA (2017) KR16. Available from: www.kuka.com/en-us/products/robotics-systems/industrial-robots/kr-16. |
| [8] |
Cen L and Melkote SN (2017) Effect of Robot Dynamics on the Machining Forces in Robotic Milling. Procedia Manufacturing 10: 486–496. doi: 10.1016/j.promfg.2017.07.034
|
| [9] | Guo Y, Dong H, Wang G, et al. (2015) Vibration analysis and suppression in robotic boring process. Int J Mach Tool Manu 101: 102–110. |
| [10] |
Sahu S, Choudhury BB and Biswal BB (2017) A Vibration Analysis of a 6 Axis Industrial Robot Using FEA. Materials Today: Proceedings 4: 2403–2410. doi: 10.1016/j.matpr.2017.02.090
|
Figures(11) / Tables(2)

M. P. Cooper, C. A. Griffiths, K. T. Andrzejewski, C. Giannetti. Motion optimisation for improved cycle time and reduced vibration in robotic assembly of electronic components[J]. AIMS Electronics and Electrical Engineering, 2019, 3(3): 274-289. doi: 10.3934/ElectrEng.2019.3.274







 DownLoad:
DownLoad: