The methodology named LIFE (Linear-in-Flux-Expressions) was developed with the purpose of simulating and analyzing large metabolic systems. With LIFE, the number of model parameters is reduced by accounting for correlations among the parameters of the system. Perturbation analysis on LIFE systems results in less overall variability of the system, leading to results that more closely resemble empirical data. These systems can be associated to graphs, and characteristics of the graph give insight into the dynamics of the system.
This work addresses two main problems: 1. for fixed metabolite levels, find all fluxes for which the metabolite levels are an equilibrium, and 2. for fixed fluxes, find all metabolite levels which are equilibria for the system. We characterize the set of solutions for both problems, and show general results relating stability of systems to the structure of the associated graph. We show that there is a structure of the graph necessary for stable dynamics. Along with these general results, we show how stability analysis from the fields of network flows, compartmental systems, control theory and Markov chains apply to LIFE systems.
Citation: Nathaniel J. Merrill, Zheming An, Sean T. McQuade, Federica Garin, Karim Azer, Ruth E. Abrams, Benedetto Piccoli. Stability of metabolic networks via Linear-in-Flux-Expressions[J]. Networks and Heterogeneous Media, 2019, 14(1): 101-130. doi: 10.3934/nhm.2019006
The methodology named LIFE (Linear-in-Flux-Expressions) was developed with the purpose of simulating and analyzing large metabolic systems. With LIFE, the number of model parameters is reduced by accounting for correlations among the parameters of the system. Perturbation analysis on LIFE systems results in less overall variability of the system, leading to results that more closely resemble empirical data. These systems can be associated to graphs, and characteristics of the graph give insight into the dynamics of the system.
This work addresses two main problems: 1. for fixed metabolite levels, find all fluxes for which the metabolite levels are an equilibrium, and 2. for fixed fluxes, find all metabolite levels which are equilibria for the system. We characterize the set of solutions for both problems, and show general results relating stability of systems to the structure of the associated graph. We show that there is a structure of the graph necessary for stable dynamics. Along with these general results, we show how stability analysis from the fields of network flows, compartmental systems, control theory and Markov chains apply to LIFE systems.

| [1] |
Efficient generation and selection of virtual populations in quantitative systems pharmacology models. Systems Pharmacology (2016) 5: 140-146. 
|
| [2] | (1993) Algebraic Graph Theory. Cambridge university press. |
| [3] |
A. Bressan and B. Piccoli, Introduction to Mathematical Control Theory, AIMS series on applied mathematics, Philadelphia, 2007. |
| [4] |
F. Bullo, Lectures on Network Systems, Edition 1, 2018, (revision 1.0 -May 1, 2018), 300 pages and 157 exercises, CreateSpace, ISBN 978-1-986425-64-3. |
| [5] |
J. S. Caughman and J. J. P. Veerman, Kernels of directed graph laplacians, The Electronic Journal of Combinatorics, 13 (2006), Research Paper 39, 8 pp. |
| [6] |
E. Çinlar, Introduction to stochastic processes, Prentice-Hall, Englewood Cliffs, N. J., 1975. |
| [7] |
P. De Leenheer, The Zero Deficiency Theorem, Notes for the Biomath Seminar I - MAP6487, Fall 09, Oregon State University (2009), Available on-line: http://math.oregonstate.edu/ deleenhp/teaching/fall09/MAP6487/notes-zero-def.pdf |
| [8] |
Dynamics of open chemical systems and the algebraic structure of the underlying reaction network. Chemical Engineering Science (1974) 29: 775-787.
|
| [9] |
Maximal flow through a network. Canadian Journal of Mathematics (1956) 8: 399-404.
|
| [10] |
D. Gale, H. Kuhn and A. W. Tucker, Linear Programming and the Theory of Games -Chapter XII, in Koopmans, Activity Analysis of Production and Allocation, 1951, 317-335 |
| [11] |
J. Gunawardena, A linear framework for time-scale separation in nonlinear biochemical systems, PloS One, 7 (2012), e36321. |
| [12] |
G. T. Heineman, G. Pollice and S. Selkow, Chapter 8: Network flow algorithms, in Algorithms in a Nutshell, Oreilly Media, 2008, 226-250. |
| [13] |
Laplacian dynamics on general graphs. Bulletin of Mathematical Biology (2013) 75: 2118-2149.
|
| [14] |
Qualitative theory of compartmental systems. SIAM Review (1993) 35: 43-79.
|
| [15] |
Timescale analysis of rule based biochemical reaction networks. Biotechnology Progress (2012) 28: 33-44.
|
| [16] |
Asymptotic behavior of nonlinear compartmental systems: Nonoscillation and stability. IEEE Transactions on Circuits and Systems (1978) 25: 372-378.
|
| [17] |
An O(|V|3) algorithm for finding maximum flows in networks. Information Processing Letters (1978) 7: 277-278.
|
| [18] |
S. T. McQuade, Z. An, N. J. Merrill, R. E. Abrams, K. Azer and B. Piccoli, Equilibria for large metabolic systems and the LIFE approach, In 2018 Annual American Control Conference (ACC). IEEE, (2018) pp. 2005-2010. |
| [19] |
S. T. McQuade, R. E. Abrams, J. S. Barrett, B. Piccoli and Karim Azer, Linear-in-flux-expressions methodology: Toward a robust mathematical framework for quantitative systems pharmacology simulators, Gene Regulation and Systems Biology, 11 (2017). |
| [20] |
C. D. Meyer, Matrix Analysis and Applied Linear Albegra, Society for Industrial and Applied Mathematics (SIAM), Philadelphia, PA, 2000. |
| [21] | (2006) Systems Biology. Cambridge University Press. |
| [22] | Using quantitative systems pharmacology for novel drug discovery. Expert Opinion on Drug Discovery (2015) 10: 1315-1331. |
| [23] |
Theory for the systemic definition of metabolic pathways and their use in interpreting metabolic function from a pathway-oriented perspective. Journal of Theoretical Biology (2000) 203: 229-248.
|
| [24] |
A network dynamics approach to chemical reaction networks. International Journal of Control (2016) 89: 731-745.
|





Figures(6)
Nathaniel J. Merrill, Zheming An, Sean T. McQuade, Federica Garin, Karim Azer, Ruth E. Abrams, Benedetto Piccoli. Stability of metabolic networks via Linear-in-Flux-Expressions[J]. Networks and Heterogeneous Media, 2019, 14(1): 101-130. doi: 10.3934/nhm.2019006

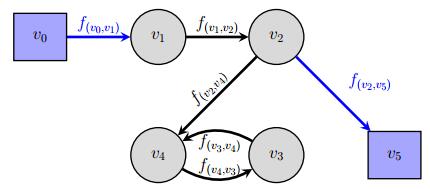
A directed graph
A directed graph
A directed graph where vertices
A directed cycle graph
Reverse Cholesterol Transport Network from [19]. This network contains 6 vertices which represent metabolites, 10 edges which represent fluxes and 2 virtual vertices
The trajectories of the values of metabolites over 25 hours






 DownLoad:
DownLoad: