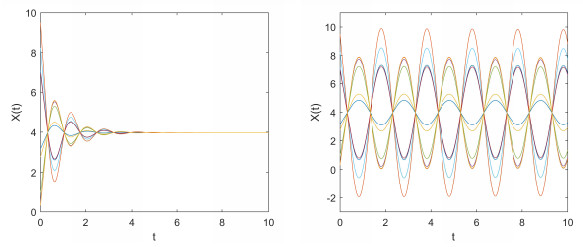
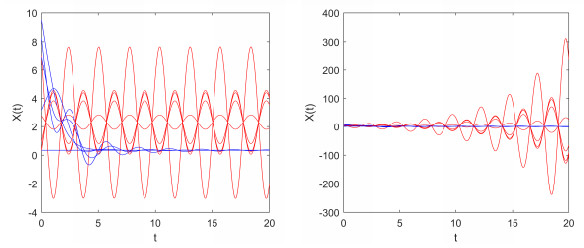
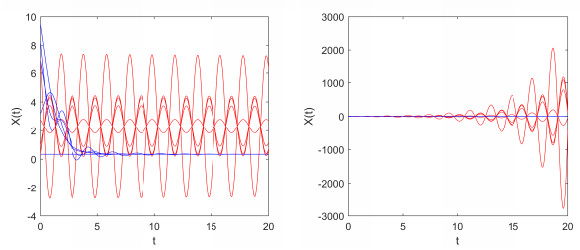
How to understand the dynamical consensus patterns in network systems is of particular significance in both theories and applications. In this paper, we are interested in investigating the influences of distributed processing delay on the consensus patterns in a network model. As new observations, we show that the desired network model undergoes both weak consensus and periodic consensus behaviors when the parameters reach a threshold value and the connectedness of the network system may be absent. In results, some criterions of weak consensus and periodic consensus with exponential convergent rate are established by the standard functional differential equations analysis. An analytic formula is given to calculate the asymptotic periodic consensus in terms of model parameters and the initial time interval. Also, we post the threshold values for some typical distributions included uniform distribution and Gamma distribution. Finally, we give the numerical simulation and analyse the influences of different delays on the consensus.
Citation: Yicheng Liu, Yipeng Chen, Jun Wu, Xiao Wang. Periodic consensus in network systems with general distributed processing delays[J]. Networks and Heterogeneous Media, 2021, 16(1): 139-153. doi: 10.3934/nhm.2021002
How to understand the dynamical consensus patterns in network systems is of particular significance in both theories and applications. In this paper, we are interested in investigating the influences of distributed processing delay on the consensus patterns in a network model. As new observations, we show that the desired network model undergoes both weak consensus and periodic consensus behaviors when the parameters reach a threshold value and the connectedness of the network system may be absent. In results, some criterions of weak consensus and periodic consensus with exponential convergent rate are established by the standard functional differential equations analysis. An analytic formula is given to calculate the asymptotic periodic consensus in terms of model parameters and the initial time interval. Also, we post the threshold values for some typical distributions included uniform distribution and Gamma distribution. Finally, we give the numerical simulation and analyse the influences of different delays on the consensus.

| [1] | Reaching a consensus. J. Am. Stat. Assoc. (1974) 69: 118-121. |
| [2] |
Information flow and cooperative control of vehicle formations. IEEE Trans. Autom. Control (2004) 49: 1465-1476. 
|
| [3] |
Stability analysis of linear coupled differential–difference systems with general distributed delays. IEEE Transactions on Automatic Control (2020) 65: 1356-1363.
|
| [4] |
J. K. Hale and S. M. V. Lunel, Introduction to Functional Differential Equations, Springer-Verlag, Berlin, 1993. doi: 10.1007/978-1-4612-4342-7
|
| [5] |
Consensus and synchronization in discrete-time networks of multi-agents with stochastically switching topologies and time delays. Networks and Heterogeneous Media (2011) 6: 329-349.
|
| [6] | A spectral element approach for the stability of delay systems. Int. J. Numer. Meth. Engng. (2011) 87: 566-592. |
| [7] |
N. A. Lynch, Distributed Algorithms, San Francisco, CA: Morgan Kaufmann, 1996. doi: 10.1108/IMDS-01-2014-0013
|
| [8] |
Stability and robustness analysis for switched systems with time-varying delays. SIAM J. Control Optim. (2018) 56: 158-182.
|
| [9] |
Consensus problems with distributed delays, with application to traffic flow models. SIAM J. Control Optim. (2009) 48: 77-101.
|
| [10] | I. C. Morarescu, W. Michiels and M. Jungers, Synchronization of coupled nonlinear oscillatiors with gamma-distributed delays, in American Control Conference, ACC 2013, (2013), Washington, United States. |
| [11] |
Consensus problems in networks of agents with switching topology and time-delays. IEEE Trans. Autom. Control (2004) 49: 1520-1533.
|
| [12] |
A. V. Proskurnikov, Average consensus in networks with nonlinearly delayed couplings and switching topology, Automatica, 49 (2013) 2928–2932. doi: 10.1016/j.automatica.2013.06.007
|
| [13] |
D. Serre, Matrices, Graduate Texts in Mathematics, 216 (2010), Springer. doi: 10.1007/978-1-4419-7683-3
|
| [14] |
Stability in a linear delay system without instantaneous negative feedback. SIAM J. Math. Anal. (2002) 33: 1297-1304.
|
| [15] |
New stability conditions for systems with distributed delays. Automatica (2013) 49: 3467-3475.
|
| [16] |
Novel type of phase transition in a system of self-driven particles. Phys. Rev. Lett. (1995) 75: 1226-1229.
|
Figures(10) / Tables(4)
Yicheng Liu, Yipeng Chen, Jun Wu, Xiao Wang. Periodic consensus in network systems with general distributed processing delays[J]. Networks and Heterogeneous Media, 2021, 16(1): 139-153. doi: 10.3934/nhm.2021002







 DownLoad:
DownLoad: