In the application of physics-informed neural networks (PINNs) for solutions of partial differential equations, the optimizer may fall into a bad local optimal solution during the training of the network. In this case, the shape of the desired solution may deviate from that of the real solution. To address this problem, we have combined the priori information and knowledge transfer with PINNs. The physics-informed neural networks with a priori information (pr-PINNs) were introduced here, which allow the optimizer to converge to a better solution, improve the training accuracy, and reduce the training time. For the experimental examples, different kinds of localized wave solutions for several types of Korteweg-de Vries (KdV) equations were solved using pr-PINNs. Multi-soliton solutions of the KdV equation, multi-soliton and lump solutions of the (2+1)-dimensional KdV equation, and higher-order rational solutions of the combined KdV-mKdV equation have been solved by pr-PINNs. By comparing the results of pr-PINNs with PINNs under the same configuration, pr-PINNs show higher accuracy and lower cost in solving different solutions of nonlinear evolution equations due to the combination of the priori information with PINNs, which enables the neural network to capture the characteristics of the solution during training. The good performance of the proposed method will have important potential application value for the solutions of real-world problems.
Citation: Zhi-Ying Feng, Xiang-Hua Meng, Xiao-Ge Xu. The data-driven localized wave solutions of KdV-type equations via physics-informed neural networks with a priori information[J]. AIMS Mathematics, 2024, 9(11): 33263-33285. doi: 10.3934/math.20241587
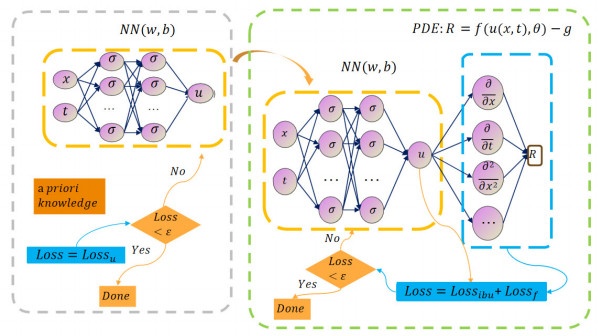
In the application of physics-informed neural networks (PINNs) for solutions of partial differential equations, the optimizer may fall into a bad local optimal solution during the training of the network. In this case, the shape of the desired solution may deviate from that of the real solution. To address this problem, we have combined the priori information and knowledge transfer with PINNs. The physics-informed neural networks with a priori information (pr-PINNs) were introduced here, which allow the optimizer to converge to a better solution, improve the training accuracy, and reduce the training time. For the experimental examples, different kinds of localized wave solutions for several types of Korteweg-de Vries (KdV) equations were solved using pr-PINNs. Multi-soliton solutions of the KdV equation, multi-soliton and lump solutions of the (2+1)-dimensional KdV equation, and higher-order rational solutions of the combined KdV-mKdV equation have been solved by pr-PINNs. By comparing the results of pr-PINNs with PINNs under the same configuration, pr-PINNs show higher accuracy and lower cost in solving different solutions of nonlinear evolution equations due to the combination of the priori information with PINNs, which enables the neural network to capture the characteristics of the solution during training. The good performance of the proposed method will have important potential application value for the solutions of real-world problems.

| [1] |
J. Sirignano, K. Spiliopoulos, DGM: A deep learning algorithm for solving partial differential equations, J. Comput. Phys., 375 (2018), 1339–1364. https://doi.org/10.1016/j.jcp.2018.08.029 doi: 10.1016/j.jcp.2018.08.029

|
| [2] |
M. Raissi, G. E. Karniadakis, Hidden physics models: Machine learning of nonlinear partial differential equations, J. Comput. Phys., 357 (2018), 125–141. https://doi.org/10.1016/j.jcp.2017.11.039 doi: 10.1016/j.jcp.2017.11.039
|
| [3] |
M. Raissi, P. Perdikaris, G. E. Karniadakis, Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations, J. Comput. Phys., 378 (2019), 686–707. https://doi.org/10.1016/j.jcp.2018.10.045 doi: 10.1016/j.jcp.2018.10.045
|
| [4] |
S. Lin, Y. Chen, Physics-informed neural network methods based on Miura transformations and discovery of new localized wave solutions, Phys. D, 445 (2023), 133629. http://dx.doi.org/10.1016/j.physd.2022.133629 doi: 10.1016/j.physd.2022.133629
|
| [5] | A. S. Krishnapriyan, A. Gholami, S. Zhe, R. M. Kirby, M. W. Mahoney, Characterizing possible failure modes in physics-informed neural networks, Adv. Neural Inform. Process. Syst., 34 (2021), 26548–26560. |
| [6] | W. Li, C. Zhang, C. Wang, H. Guan, D. Tao, Revisiting PINNs: Generative adversarial physics-informed neural networks and point-weighting method, arXiv: 2205.08754, 2022. https://doi.org/10.48550/arXiv.2205.08754 |
| [7] |
A. D. Jagtap, E. Kharazmi, G. E. Karniadakis, Conservative physics-informed neural networks on discrete domains for conservation laws: Applications to forward and inverse problems, Comput. Methods Appl. Mech. Eng., 365 (2020), 113028. https://doi.org/10.1016/j.cma.2020.113028 doi: 10.1016/j.cma.2020.113028
|
| [8] |
A. D. Jagtap, G. E. Karniadakis, Extended physics-informed neural networks (XPINNs): A generalized space-time domain decomposition based deep learning framework for nonlinear partial differential equations, Commun. Comput. Phys., 28 (2020), 2002–2041. http://dx.doi.org/10.4208/cicp.oa-2020-0164 doi: 10.4208/cicp.oa-2020-0164
|
| [9] |
E. L. Bourodimos, Linear and nonlinear wave motion, Rev. Geophys., 6 (1968), 103–128. https://doi.org/10.1029/RG006i002p00103 doi: 10.1029/RG006i002p00103
|
| [10] |
U. Waheed, E. Haghighat, T. Haghighat, C. Song, Q. Hao, PINNeik: Eikonal solution using physics-informed neural networks, Comput. Geosci., 155 (2021), 104833. https://doi.org/10.1016/j.cageo.2021.104833 doi: 10.1016/j.cageo.2021.104833
|
| [11] |
X. Huang, T. Alkhalifah, PINNup: Robust neural network wavefield solutions using frequency upscaling and neuron splitting, J. Geophys. Res. Solid Earth, 127 (2022), e2021JB023703. https://doi.org/10.1029/2021JB023703 doi: 10.1029/2021JB023703
|
| [12] |
X. Huang, T. Alkhalifah, Efficient physics-informed neural networks using hash encoding, J. Comput. Phys., 501 (2024), 112760. https://doi.org/10.1016/j.jcp.2024.112760 doi: 10.1016/j.jcp.2024.112760
|
| [13] |
X. Huang, T. Alkhalifah, GaborPINN: Efficient physics informed neural networks using multiplicative filtered networks, IEEE Geosci. Remote Sens. Lett., 20 (2023), 3003405. http://dx.doi.org/10.1109/LGRS.2023.3330774 doi: 10.1109/LGRS.2023.3330774
|
| [14] |
T. Alkhalifah, X. Huang, Physics-informed neural wavefields with Gabor basis functions, Neural Netw., 175 (2024) 106286. https://dx.doi.org/10.1016/j.neunet.2024.106286 doi: 10.1016/j.neunet.2024.106286
|
| [15] |
M. Raissi, A. Yazdani, G. E. Karniadakis, Hidden fluid mechanics: Learning velocity and pressure fields from flow visualizations, Science, 367 (2020), 1026–1030. https://doi.org/10.1126/science.aaw4741 doi: 10.1126/science.aaw4741
|
| [16] |
W. X. Qiu, Z. Z. Si, D. S. Mou, C. Q. Dai, J. T. Li, W. Liu, Data-driven vector degenerate and nondegenerate solitons of coupled nonlocal nonlinear Schrödinger equation via improved PINN algorithm, Nonlinear Dyn., 2024. https://doi.org/10.1007/s11071-024-09648-y doi: 10.1007/s11071-024-09648-y
|
| [17] |
J. W. Miles, The Korteweg-de Vries equation: A historical essay, J. Fluid Mech., 106 (1981), 131–147. https://doi.org/10.1017/S0022112081001559 doi: 10.1017/S0022112081001559
|
| [18] |
M. Wadati, The modified Korteweg-de Vries equation, J. Phys. Soc. Jan., 34 (1973), 1289–1296. https://doi.org/10.1143/JPSJ.34.1289 doi: 10.1143/JPSJ.34.1289
|
| [19] |
J. C. Preisig, T. F. Duda, Coupled acoustic mode propagation through continental-shelf internal solitary waves, IEEE J. Ocean. Eng., 22 (1997), 256–269. http://dx.doi.org/10.1109/48.585945 doi: 10.1109/48.585945
|
| [20] |
M. A. Guidry, D. M. Lukin, K. Y. Yang, R. Trivedi, J. Vu$\breve{\rm{c}}$ković, Quantum optics of soliton microcombs, Nat. Photon., 16 (2022), 52–58. http://dx.doi.org/10.1038/s41566-021-00901-z doi: 10.1038/s41566-021-00901-z
|
| [21] |
L. L. Bonilla, M. Carretero, F. Terragni, B. Birnir, Soliton driven angiogenesis, Sci. Rep., 6 (2016), 31296. https://doi.org/10.1038/srep31296 doi: 10.1038/srep31296
|
| [22] |
R. R. Yuan, Y. Shi, S. L. Zhao, J. X. Zhao, The combined KdV-mKdV equation: Bilinear approach and rational solutions with free multi-parameters, Results Phys., 55 (2023), 107188. http://dx.doi.org/10.1016/j.rinp.2023.107188 doi: 10.1016/j.rinp.2023.107188
|
| [23] |
J. Li, Y. Chen, Solving second-order nonlinear evolution partial differential equations using deep learning, Commun. Theor. Phys., 72 (2020), 105005. http://dx.doi.org/10.1088/1572-9494/aba243 doi: 10.1088/1572-9494/aba243
|
| [24] |
J. Li, Y. Chen, A deep learning method for solving third-order nonlinear evolution equations, Commun. Theor. Phys., 72 (2020), 115003. http://dx.doi.org/10.1088/1572-9494/abb7c8 doi: 10.1088/1572-9494/abb7c8
|
| [25] |
Z. Zhou, L. Wang, Z. Yan, Data-driven discoveries of Bäklund transformations and soliton evolution equations via deep neural network learning schemes, Phys. Lett. A, 450 (2022), 128373. https://doi.org/10.1016/j.physleta.2022.128373 doi: 10.1016/j.physleta.2022.128373
|
| [26] |
S. F. Sun, S. F. Tian, B. Li, The data-driven rogue waves of the Hirota equation by using Mix-training PINNs approach, Phys. D, 465 (2024), 134202. https://doi.org/10.1016/j.physd.2024.134202 doi: 10.1016/j.physd.2024.134202
|
| [27] |
S. F. Tian, Z. J. Niu, B. Li, Mix-training physics-informed neural networks for high-order rogue waves of cmKdV equation, Nonlinear Dyn., 111 (2023), 16467–16482. https://doi.org/10.1007/s11071-023-08712-3 doi: 10.1007/s11071-023-08712-3
|
| [28] |
Z. Zhou, Z. Yan, Is the neural tangent kernel of PINNs deep learning general partial differential equations always convergent?, Phys. D, 457 (2024), 133987. https://doi.org/10.1016/j.physd.2023.133987 doi: 10.1016/j.physd.2023.133987
|
| [29] |
Q. Zhang, H. Gao, Z. H. Zhan, J. Li, H. Zhang, Growth optimizer: A powerful metaheuristic algorithm for solving continuous and discrete global optimization problems, Knowl. Based Syst., 261 (2023), 110206. https://doi.org/10.1016/j.knosys.2022.110206 doi: 10.1016/j.knosys.2022.110206
|
| [30] |
T. Lindeberg, Discrete approximations of Gaussian smoothing and Gaussian derivatives, J. Math. Imaging Vis., 66 (2024), 759–800. https://doi.org/10.1007/s10851-024-01196-9 doi: 10.1007/s10851-024-01196-9
|
| [31] |
N. J. Zabusky, C. J. Galvin, Shallow-water waves, the Korteweg-deVries equation and solitons, J. Fluid Mech., 47 (1971), 811–824. https://doi.org/10.1017/S0022112071001393 doi: 10.1017/S0022112071001393
|
| [32] | R. Hirota, The direct method in soliton theory, Cambridge: Cambridge University Press, 2004. https://doi.org/10.1017/CBO9780511543043 |
| [33] | A. Daw, J. Bu, S. Wang, P. Perdikaris, A. Karpatne, Mitigating propagation failures in physics-informed neural networks using retain-resample-release (R3) sampling, arXiv: 2207.02338, 2023. https://doi.org/10.48550/arXiv.2207.02338 |
| [34] |
M. Bokaeeyan, A. Ankiewicz, N. Akhmediev, Bright and dark rogue internal waves: The Gardner equation approach, Phys. Rev. E, 99 (2019), 062224. https://doi.org/10.1103/PhysRevE.99.062224 doi: 10.1103/PhysRevE.99.062224
|



















Figures(20) / Tables(5)

Zhi-Ying Feng, Xiang-Hua Meng, Xiao-Ge Xu. The data-driven localized wave solutions of KdV-type equations via physics-informed neural networks with a priori information[J]. AIMS Mathematics, 2024, 9(11): 33263-33285. doi: 10.3934/math.20241587







 DownLoad:
DownLoad: