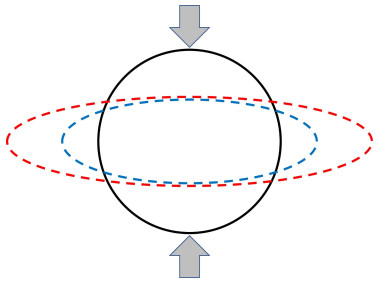
Arterial deformations arise in blood flow when surrounding tissue invades the space available for a blood vessel to maintain its circular cross section, the most immediate effects being a reduction in blood flow and redistribution of shear stress. Here we consider deformations from circular to elliptic cross sections. Solution of this problem in steady flow is fairly straightforward. The focus in the present paper is on pulsatile flow where the change from circular to elliptic cross sections is associated with a transition in the character of the equations governing the flow from Bessel to Mathieu equations. The main aim of our study is to examine the hemodynamic consequences of the change from circular to elliptic cross sections and on possible implications of this change in blood flow regulation. The study of this problem has been hampered in the past because of difficulties involved in the solution of the governing equations. In the present study we describe methods we have used to overcome some of these difficulties and present a comprehensive set of results based on these methods. In particular, vessel deformation is examined under two different conditions relevant to blood flow regulation: (i) keeping cross sectional area constant and (ii) keeping cross sectional circumference constant. The results provide an important context for the mechanism of neurovascular control of blood flow under the pathological conditions of vessel deformation. The difficulty which has characterized this problem is that it involves elements of mathematics which are well outside the scope of a clinical/physiological study, while it actually involves clinical/physiological elements which are well outside the scope of a mathematical study. We hope that the context which we provide in this paper helps resolve this difficulty.
Citation: Chris Brimacombe, Robert M. Corless, Mair Zamir. Elliptic cross sections in blood flow regulation[J]. AIMS Mathematics, 2023, 8(10): 23108-23145. doi: 10.3934/math.20231176
Arterial deformations arise in blood flow when surrounding tissue invades the space available for a blood vessel to maintain its circular cross section, the most immediate effects being a reduction in blood flow and redistribution of shear stress. Here we consider deformations from circular to elliptic cross sections. Solution of this problem in steady flow is fairly straightforward. The focus in the present paper is on pulsatile flow where the change from circular to elliptic cross sections is associated with a transition in the character of the equations governing the flow from Bessel to Mathieu equations. The main aim of our study is to examine the hemodynamic consequences of the change from circular to elliptic cross sections and on possible implications of this change in blood flow regulation. The study of this problem has been hampered in the past because of difficulties involved in the solution of the governing equations. In the present study we describe methods we have used to overcome some of these difficulties and present a comprehensive set of results based on these methods. In particular, vessel deformation is examined under two different conditions relevant to blood flow regulation: (i) keeping cross sectional area constant and (ii) keeping cross sectional circumference constant. The results provide an important context for the mechanism of neurovascular control of blood flow under the pathological conditions of vessel deformation. The difficulty which has characterized this problem is that it involves elements of mathematics which are well outside the scope of a clinical/physiological study, while it actually involves clinical/physiological elements which are well outside the scope of a mathematical study. We hope that the context which we provide in this paper helps resolve this difficulty.

| [1] | U. Ascher, J. Christiansen, R. D. Russell, COLSYS–a collocation code for boundary-value problems, Codes for Boundary-Value problems in ordinary differential equations, (1978), 164–185. Springer. https://doi.org/10.1007/3-540-09554-3_12 |
| [2] | U. M. Ascher, R. M. Mattheij, R. D. Russell, Numerical solution of boundary value problems for ordinary differential equations, SIAM, 1995. https://doi.org/10.1137/1.9781611971231 |
| [3] |
L. C. Berselli, F. Guerra, B. Mazzolai, E. Sinibaldi, Pulsatile viscous flows in elliptical vessels and annuli: solution to the inverse problem, with application to blood and cerebrospinal fluid flow, SIAM J. Appl. Math., 74 (2014), 40–59. https://doi.org/10.1137/120903385 doi: 10.1137/120903385

|
| [4] |
C. Brimacombe, R. M. Corless, M. Zamir, Computation and applications of Mathieu functions: A historical perspective, SIAM Rev., 63 (2021), 653–720. https://doi.org/10.1137/20M135786X doi: 10.1137/20M135786X
|
| [5] |
Y. S. Chatzizisis, A. U. Coskun, M. Jonas, E. R. Edelman, C. L. Feldman, P. H. Stone, Role of endothelial shear stress in the natural history of coronary atherosclerosis and vascular remodeling: molecular, cellular, and vascular behavior, J. Am. Coll. Cardiol., 49 (2007), 2379–2393. https://doi.org/10.1016/j.jacc.2007.02.059 doi: 10.1016/j.jacc.2007.02.059
|
| [6] | R. M. Corless, E. Postma, Blends in Maple, Maple in Mathematics Education and Research: 4th Maple Conference, MC 2020, Waterloo, Ontario, Canada, November 2–6, 2020, Revised Selected Papers 4, (2021), 167–184. Springer International Publishing. https://doi.org/10.1007/978-3-030-81698-8_12 |
| [7] |
A. Delfino, J. E. Moore Jr, J. J. Meister, Lateral deformation and movement effects on flow through distensible tube models of blood vessels, Biorheology, 31 (1994), 533–547. https://doi.org/10.3233/BIR-1994-31503 doi: 10.3233/BIR-1994-31503
|
| [8] |
S. Gupta, D. Poulikakos, V. Kurtcuoglu, Analytical solution for pulsatile viscous flow in a straight elliptic annulus and application to the motion of the cerebrospinal fluid, Phys. Fluids, 20 (2008), 093607. https://doi.org/10.1063/1.2988858 doi: 10.1063/1.2988858
|
| [9] |
K. Gustafsson, M. Lundh, G. Söderlind, A PI stepsize control for the numerical solution of ordinary differential equations, BIT, 28 (1988), 270–287. https://doi.org/10.1007/BF01934091 doi: 10.1007/BF01934091
|
| [10] | E. Hairer, G. Wanner, Solving ordinary differential equations Ⅱ: Stiff and differential-algebraic problems, volume 14, 2002. Springer Verlag. |
| [11] | E. Hairer, S. P. Nørsett, G. Wanner, Solving ordinary differential equations: Nonstiff problems, Springer, 1993. |
| [12] |
M. Haslam, M. Zamir, Pulsatile flow in tubes of elliptic cross sections, Ann. Biomed. Eng., 26 (1998), 780–787. https://doi.org/10.1114/1.106 doi: 10.1114/1.106
|
| [13] | M. C. Haslam, Mechanics of oscillating flow in tubes of elliptic cross-section, Master's thesis, 1998. |
| [14] |
H. A. Himburg, D. M. Grzybowski, A. L. Hazel, J. A. LaMack, X. M. Li, M. H. Friedman, Spatial comparison between wall shear stress measures and porcine arterial endothelial permeability, American Journal of Physiology-Heart and Circulatory Physiology, 286 (2004), H1916–H1922. https://doi.org/10.1152/ajpheart.00897.2003 doi: 10.1152/ajpheart.00897.2003
|
| [15] |
C. Hunter, B. Guerrieri, The eigenvalues of Mathieu's equation and their branch points, Stud. Appl. Math., 64 (1981), 113–141. https://doi.org/10.1002/sapm1981642113 doi: 10.1002/sapm1981642113
|
| [16] |
S. Ilie, G. Soderlind, R. M. Corless, Adaptivity and computational complexity in the numerical solution of odes, J. Complexity, 24 (2008), 341–361. https://doi.org/10.1016/j.jco.2007.11.004 doi: 10.1016/j.jco.2007.11.004
|
| [17] | D. N. Irani, Cerebrospinal fluid in clinical practice, Philadelphia: Elsevier, 2009. |
| [18] |
K. Kansy, Elementare fehlerdarstellung fur ableitungen bei der Hermite-interpolation, Numer. Math., 21 (1973), 350–354. https://doi.org/10.1007/BF01436389 doi: 10.1007/BF01436389
|
| [19] | V. Kurtcuoglu, Computational Fluid Dynamics for the Assessment of Cerebrospinal Fluid Flow and Its Coupling with Cerebral Blood Flow, New York: Springer, 2011. https://doi.org/10.1007/978-1-4419-9997-9_8 |
| [20] | D. F. Lawden, Elliptic functions and applications, New York: Springer, 2013. |
| [21] |
F. Loth, M. A. Yardimci, N. Alperin, Hydrodynamic modeling of cerebrospinal fluid motion within the spinal cavity, J. Biomech. Eng., 123 (2001), 71–79. https://doi.org/10.1115/1.1336144 doi: 10.1115/1.1336144
|
| [22] |
A. M. Malek, S. L. Alper, S. Izumo, Hemodynamic shear stress and its role in atherosclerosis, Jama, 282 (1999), 2035–2042. https://doi.org/10.1001/jama.282.21.2035 doi: 10.1001/jama.282.21.2035
|
| [23] | E. Mathieu, Memoire sur le mouvement vibratoire d'une membrane de forme elliptique, Journal de mathematiques pures et appliquees, 13 (1868), 137–203. |
| [24] | N. W. McLachlan, Theory and application of Mathieu functions, Clarendon Press, 1951. |
| [25] | J. Meixner, F. W. Schäfke, G. Wolf, Mathieu functions, Springer, 1980. https://doi.org/10.1007/BFb0096196 |
| [26] |
M. Mezzarobba, NumGfun: a package for numerical and analytic computation with D-finite functions, Proceedings of the 2010 International Symposium on Symbolic and Algebraic Computation, (2010), 139–145. https://doi.org/10.1145/1837934.1837965 doi: 10.1145/1837934.1837965
|
| [27] |
M. R. Moreno, J. E. Moore, R. Meuli, Cross-sectional deformation of the aorta as measured with magnetic resonance imaging, J. Biomech. Eng., 120 (1998), 18–21. https://doi.org/10.1115/1.2834298 doi: 10.1115/1.2834298
|
| [28] | P. M. C. Morse, H. Feshbach, Methods of theoretical physics, volume 2, Technology Press, 1946. |
| [29] |
N. S. Nedialkov, J. D. Pryce, Solving differential-algebraic equations by Taylor series (i): Computing Taylor coefficients, BIT, 45 (2005), 561–591. https://doi.org/10.1007/s10543-005-0019-y doi: 10.1007/s10543-005-0019-y
|
| [30] |
T. P. Padera, B. R. Stoll, J. B. Tooredman, D. Capen, E. di Tomaso, R. K. Jain, Pathology: cancer cells compress intratumour vessels, Nature, 427 (2004), 695. https://doi.org/10.1038/427695a doi: 10.1038/427695a
|
| [31] | R. Quadir, Flow in tubes of non-circular cross-sections, PhD Thesis, University of Western Ontario, 1993. |
| [32] |
C. Rackauckas, Q. Nie, DifferentialEquations.jl – a performant and feature-rich ecosystem for solving differential equations in Julia, Journal of Open Research Software, 5 (2017), 15. https://doi.org/10.5334/jors.151 doi: 10.5334/jors.151
|
| [33] |
M. B. Robertson, U. Kohler, P. R. Hoskins, I. Marshall, Flow in elliptical vessels calculated for a physiological waveform, J. Vasc. Res., 38 (2001), 73–82. https://doi.org/10.1159/000051032 doi: 10.1159/000051032
|
| [34] |
T. Roose, P. A. Netti, L. L. Munn, Y. Boucher, R. K. Jain, Solid stress generated by spheroid growth estimated using a linear poroelasticity model, Microvasc. Res., 66 (2003), 204–212. https://doi.org/10.1016/S0026-2862(03)00057-8 doi: 10.1016/S0026-2862(03)00057-8
|
| [35] | L. B. Rowell, Human cardiovascular control, Oxford University Press: USA, 1993. https://doi.org/10.1249/00005768-199312000-00021 |
| [36] |
A. M. Shaaban, A. J. Duerinckx, Wall shear stress and early atherosclerosis: a review, Am. J. Roentgenol., 174 (2000), 1657–1665. https://doi.org/10.2214/ajr.174.6.1741657 doi: 10.2214/ajr.174.6.1741657
|
| [37] |
L. F. Shampine, R. M. Corless, Initial value problems for ODEs in problem solving environments, J. Comput. Appl. Math., 125 (2000), 31–40. https://doi.org/10.1016/S0377-0427(00)00456-8 doi: 10.1016/S0377-0427(00)00456-8
|
| [38] |
G. Soderlind, L. Jay, M. Calvo, Stiffness 1952–2012: Sixty years in search of a definition, BIT, 55 (2015), 531–558. https://doi.org/10.1007/s10543-014-0503-3 doi: 10.1007/s10543-014-0503-3
|
| [39] |
H. W. Stockman, Effect of anatomical fine structure on the flow of cerebrospinal fluid in the spinal subarachnoid space, J. Biomech. Eng., 128 (2006), 106–114. https://doi.org/10.1115/1.2132372 doi: 10.1115/1.2132372
|
| [40] |
T. Stylianopoulos, J. D. Martin, V. P. Chauhan, S. R. Jain, B. Diop-Frimpong, N. Bardeesy, et al., Causes, consequences, and remedies for growth-induced solid stress in murine and human tumors, Proceedings of the National Academy of Sciences, 109 (2012), 15101–15108. https://doi.org/10.1073/pnas.1213353109 doi: 10.1073/pnas.1213353109
|
| [41] |
A. Wouk, Collocation for initial value problems, BIT, 16 (1976), 215–222. https://doi.org/10.1007/BF01931372 doi: 10.1007/BF01931372
|
| [42] | M. Zamir, The physics of pulsatile flow, Springer, 2000. https://doi.org/10.1007/978-1-4612-1282-9 |
| [43] | M. Zamir, The physics of coronary blood flow, New York: Springer, 2005. |
| [44] | M. Zamir, Hemo-dynamics, New York: Springer, 2016. https://doi.org/10.1007/978-3-319-24103-6 |
| [45] |
C. H. Ziener, M. Ruckl, T. Kampf, W. R. Bauer, H. P. Schlemmer, Mathieu functions for purely imaginary parameters, J. Comput. Appl. Math., 236 (2012), 4513–4524. https://doi.org/10.1016/j.cam.2012.04.023 doi: 10.1016/j.cam.2012.04.023
|
Figures(17) / Tables(1)

Chris Brimacombe, Robert M. Corless, Mair Zamir. Elliptic cross sections in blood flow regulation[J]. AIMS Mathematics, 2023, 8(10): 23108-23145. doi: 10.3934/math.20231176







 DownLoad:
DownLoad: