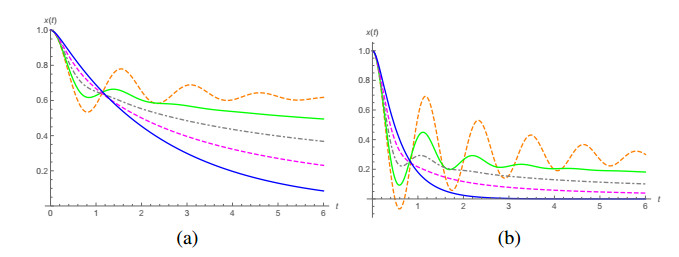
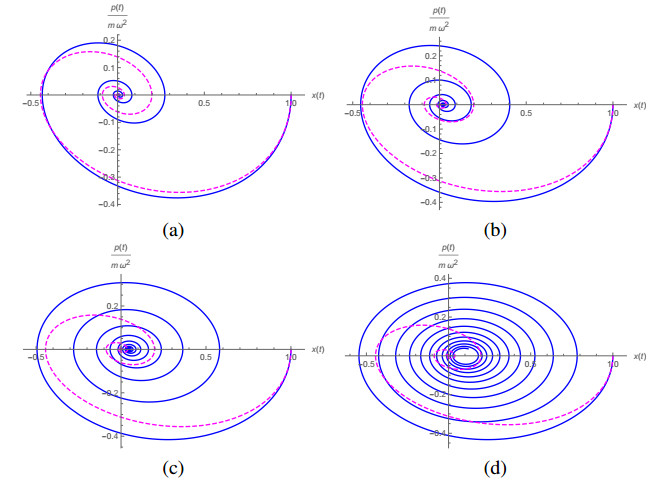
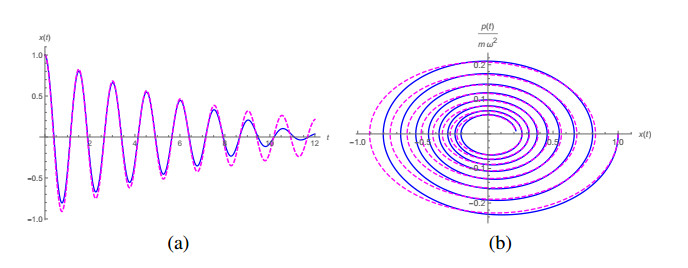
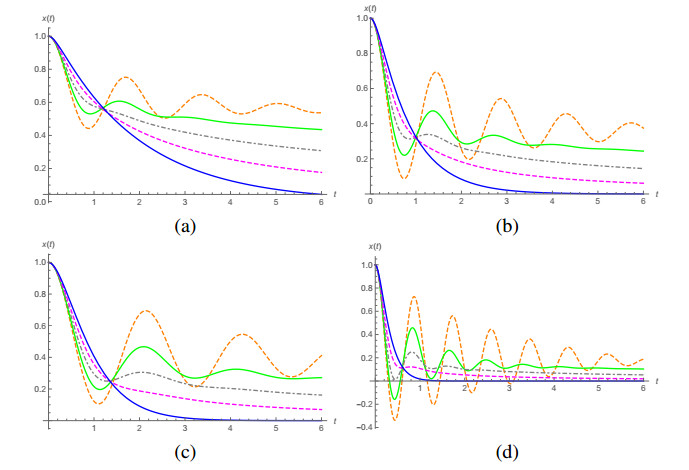
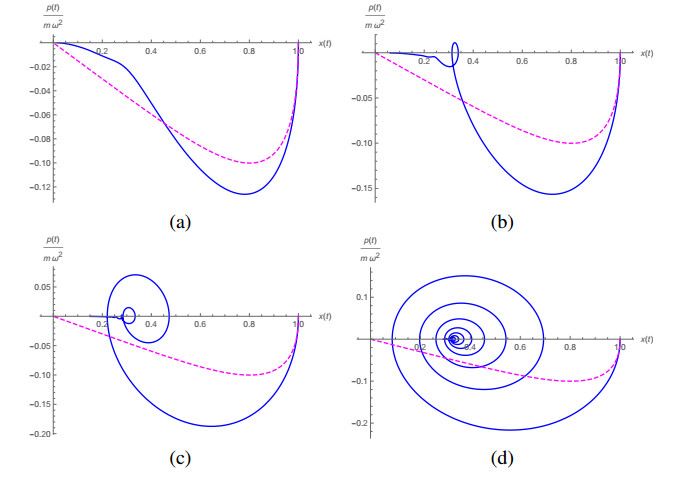
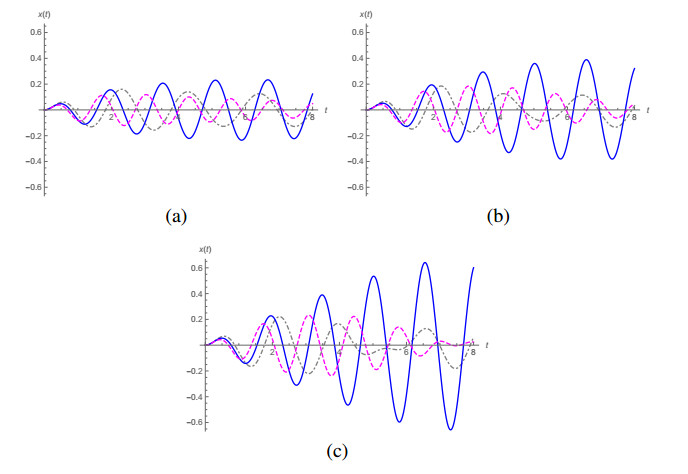
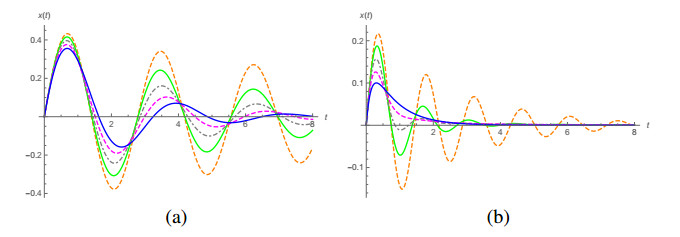
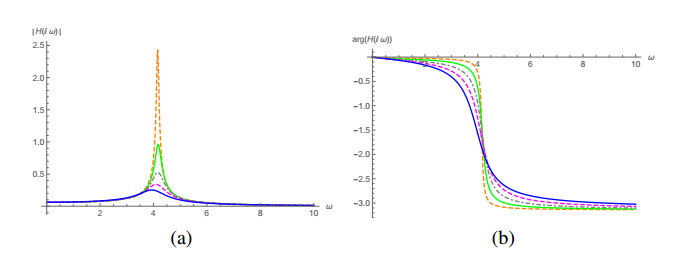
In this paper we discuss the model of fractional oscillator where the inertial and restoring force terms maintains their usual expression but the damping term involves a fractional derivative of Caputo type, the so called fractional Kelvin-Voigt oscillator. The transient solution of this model is given in terms of the so called bivariate Mittag-Leffler function, while the steady-state solution in response to a sinusoidal force involves a 4-variate Mittag-Leffler function. We give numerical examples comparing the solutions for different values of the order $ \alpha $ of the fractional derivative ($ 0 < \alpha \leq 1 $), and compare them with the usual $ \alpha = 1 $ solutions in the underdamped, overdamped and critically damped situations.
Citation: Jayme Vaz Jr., Edmundo Capelas de Oliveira. On the fractional Kelvin-Voigt oscillator[J]. Mathematics in Engineering, 2022, 4(1): 1-23. doi: 10.3934/mine.2022006
In this paper we discuss the model of fractional oscillator where the inertial and restoring force terms maintains their usual expression but the damping term involves a fractional derivative of Caputo type, the so called fractional Kelvin-Voigt oscillator. The transient solution of this model is given in terms of the so called bivariate Mittag-Leffler function, while the steady-state solution in response to a sinusoidal force involves a 4-variate Mittag-Leffler function. We give numerical examples comparing the solutions for different values of the order $ \alpha $ of the fractional derivative ($ 0 < \alpha \leq 1 $), and compare them with the usual $ \alpha = 1 $ solutions in the underdamped, overdamped and critically damped situations.

| [1] | K. B. Oldham, J. Spanier, Fractional calculus: theory and applications of differentiation and integration to arbitrary order, Dover Publications Inc., 2006. |
| [2] | R. Herrmann, Fractional calculus: an introduction for physicists, 3 Eds., World Scientific Publishing Co, 2018. |
| [3] | M. M. Merrschaert, A. Sikorskii, Stochastic and computational models for fractional calculus, 2 Eds., de Gruyter, 2019. |
| [4] | E. C. de Oliveira, Solved exercises in fractional calculus, Switzerland: Springer Nature, 2019. |
| [5] | I. Podlubny, Fractional differential equations, Academic Press, 1998. |
| [6] | A. A. Kilbas, H. M. Srivastava, J. J. Trujillo, Theory and applications of fractional differential equations, Elsevier, 2006. |
| [7] | A. Kochubei, Y. Luchko, Handbook of fractional calculus with applications – Volume 2: fractional differential equations, De Gruyter, 2019. |
| [8] |
F. Mainardi, Fractional relaxation-oscillation and fractional diffusion-wave phenomena, Chaos Soliton. Fract., 7 (1996), 1461–1477. doi: 10.1016/0960-0779(95)00125-5

|
| [9] |
B. N. Narahari Achar, J. W. Hanneken, T. Enck, T. Clarke, Dynamics of the fractional oscillator, Physica A, 297 (2001), 361–367. doi: 10.1016/S0378-4371(01)00200-X
|
| [10] |
Ya. E. Ryabov, A. Puzenko, Damped oscillations in view of the fractional oscillator equation, Phys. Rev. B, 66 (2002), 184201. doi: 10.1103/PhysRevB.66.184201
|
| [11] | A. A. Stanislavsky, Fractional oscillators, Phys. Rev. E, 70 (2004), 051103. |
| [12] | Yu. A. Rossikhin, M. V. Shitikova, New approach for the analysis of damped vibrations of fractional oscillators, Shock Vib., 16 (2009), 387676. |
| [13] | S. S. Ray, S. Sahoo, S. Das, Formulation and solutions of fractional continuously variable order mass–spring–damper systems controlled by viscoelastic and viscous–viscoelastic dampers, Adv. Mech. Eng., 8 (2016), 1–13. |
| [14] |
M. Berman, L. S. Cederbaum, Fractional driven-damped oscillator and its general closed form exact solution, Physica A, 505 (2018), 744–762. doi: 10.1016/j.physa.2018.03.044
|
| [15] |
R. Parovik, Mathematical modeling of linear fractional oscillators, Mathematics, 8 (2020), 1879. doi: 10.3390/math8111879
|
| [16] |
M. Li, Three classes of fractional oscillators, Symmetry, 10 (2018), 40. doi: 10.3390/sym10020040
|
| [17] |
Yu. A. Rossikhin, M. V. Shitikova, Application of fractional calculus for dynamic problems of solid mechanics: novel trends and recent results, Appl. Mech. Rev., 63 (2010), 010801. doi: 10.1115/1.4000563
|
| [18] |
Yu. A. Rossikhin, M. V. Shitikova, Application of fractional derivatives on the analysis of damped vibrations of viscoelastic single mass systems, Acta Mech., 120 (1997), 109–125. doi: 10.1007/BF01174319
|
| [19] | R. M. Christensen, Theory of viscoelasticity, 2 Eds., Academic Press Inc., 1982. |
| [20] | F. Mainardi, Fractional calculus and waves in linear viscoelasticity: an introduction to mathematical models, Imperial College Press, 2010. |
| [21] | R. L. Bagley, P. J. Torvik, A theoretical basis for the application of fractional calculus to viscoelasticity, J. Rheol., 21 (1983), 201–207. |
| [22] |
R. L. Bagley, P. J. Torvik, On the fractional calculus model of viscoelastic behaviour, J. Rheol., 30 (1986), 133–155. doi: 10.1122/1.549887
|
| [23] | F. Mainardi, R. Gorenflo, Time-fractional derivatives in relaxation processes: a tutorial survey, Fract. Calc. Appl. Anal., 10 (2007), 269–308. |
| [24] |
M. Di Paola, A. Pirrotta, A. Valenza, Visco-elastic behavior through fractional calculus: An easier method for best fitting experimental results, Mech. Mater., 43 (2011), 799–806. doi: 10.1016/j.mechmat.2011.08.016
|
| [25] | E. C. de Oliveira, J. A. Tenreiro Machado, A review of definitions for fractional derivatives and integral, Math. Probl. Eng., 2014 (2014), 238459. |
| [26] |
G. S. Teodoro, J. A. Tenreiro Machado, E. C. de Oliveira, A review of definitions of fractional derivatives and other operators, J. Comput. Phys., 388 (2019), 195–208. doi: 10.1016/j.jcp.2019.03.008
|
| [27] |
E. C. de Oliveira, S. Jarosz, J. Vaz Jr., Fractional calculus via Laplace transform and its application in relaxation processes, Commun. Nonlinear Sci., 69 (2019), 58–72. doi: 10.1016/j.cnsns.2018.09.013
|
| [28] | R. Gorenflo, A. A. Kilbas, F. Mainardi, S. Rogosin, Mittag-Leffler functions, related topics and applications, 2 Eds., Springer-Verlag GmbH Germany, 2020. |
| [29] | H. J. Haubold, A. M. Mathai, R. X. Saxena, Mittag-Leffler functions and their applications, J. Appl. Math., 2011 (2011), 298628. |
| [30] | G. B. Arfken, H. J. Weber, Mathematical methods for physicists, 6 Eds., Elsevier Science, 2006. |
| [31] | A. L. Soubhia, R. F. Camargo, E. C. de Oliveira, J. Vaz Jr., Theorem for series in three-parameter Mittag-Leffler function, Fract. Calc. Appl. Anal., 13 (2010), 9–20. |
| [32] | A. P. Prudnikov, Yu. A. Brychkov, O. I. Marichev, Integrals and series – Volume 1: elementary functions, Gordon and Breach, 1986. |
| [33] | A. H. Zemanian, Distribution theory and transform analysis: an introduction to generalized functions, with applications, Dover Publications Inc., 2010. |
| [34] | R. P. Kanwal, Generalized functions: theory and applications, 3. Eds., Birkhauser, 2004. |
| [35] | U. Graf, Applied Laplace transforms and z-transforms for scientists and engineers, Birkhauser, 2004. |
| [36] | D. V. Widder, The Laplace transform, Dover Publications Inc., 2010. |
| [37] | E. Wegert, G. Semmler, Phase plots of complex functions: a journey in illustration, Notices of AMS, 58 (2011), 768–780. |
Figures(9)

Jayme Vaz Jr., Edmundo Capelas de Oliveira. On the fractional Kelvin-Voigt oscillator[J]. Mathematics in Engineering, 2022, 4(1): 1-23. doi: 10.3934/mine.2022006







 DownLoad:
DownLoad: