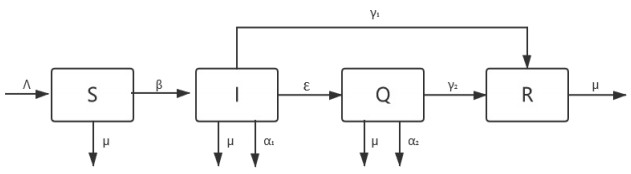
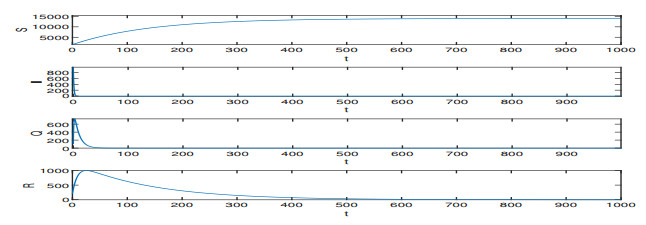
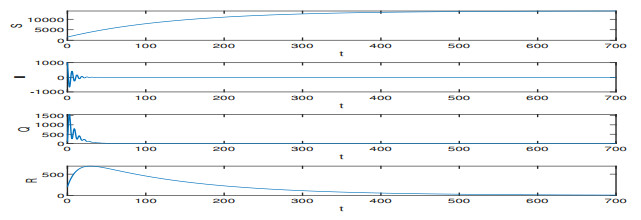
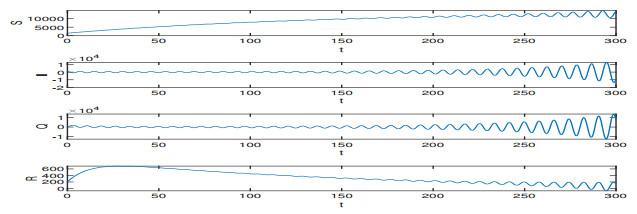
Based on the $ SIQR $ model, we consider the influence of time delay from infection to isolation and present a delayed differential equation (DDE) according to the characteristics of the COVID-19 epidemic phenomenon. First, we consider the existence and stability of equilibria in the above delayed $ SIQR $ model. Second, we analyze the existence of Hopf bifurcations associated with two equilibria, and we verify that Hopf bifurcations occur as delays crossing some critical values. Then, we derive the normal form for Hopf bifurcation by using the multiple time scales method for determining the stability and direction of bifurcation periodic solutions. Finally, numerical simulations are carried out to verify the analytic results.
Citation: Shishi Wang, Yuting Ding, Hongfan Lu, Silin Gong. Stability and bifurcation analysis of $ SIQR $ for the COVID-19 epidemic model with time delay[J]. Mathematical Biosciences and Engineering, 2021, 18(5): 5505-5524. doi: 10.3934/mbe.2021278
Based on the $ SIQR $ model, we consider the influence of time delay from infection to isolation and present a delayed differential equation (DDE) according to the characteristics of the COVID-19 epidemic phenomenon. First, we consider the existence and stability of equilibria in the above delayed $ SIQR $ model. Second, we analyze the existence of Hopf bifurcations associated with two equilibria, and we verify that Hopf bifurcations occur as delays crossing some critical values. Then, we derive the normal form for Hopf bifurcation by using the multiple time scales method for determining the stability and direction of bifurcation periodic solutions. Finally, numerical simulations are carried out to verify the analytic results.

| [1] |
J. Liu, W. Xie, Y. Wang, Y. Xiong, S. Chen, J. Han, et al., A comparative overview of COVID-19, MERS and SARS: Review article, Int. J. Surg., 81 (2020), 1–8. doi: 10.1016/j.ijsu.2020.07.032

|
| [2] | C. Huang, Y. Wang, X. Li, L. Ren, J. Zhao, Y. Hu, et al., Clinical features of patients infected with 2019 novel coronavirus in Wuhan, China, lancet, 395 (2020), 497–506. |
| [3] | C. A. Varotsos, V. F. Krapivin, Y. Xue, Diagnostic model for the society safety under COVID-19 pandemic conditions, Saf. Sci., 136 (2021), 105164. |
| [4] | C. A. Varotsos, V. F. Krapivin, A new model for the spread of COVID-19 and the improvement of safety, Saf. Sci., 132 (2020), 104962. |
| [5] |
U. Avila-Ponce de León, Á. G. C. Pérez, E. Avila-Vales, An SEIARD epidemic model for COVID-19 in Mexico: Mathematical analysis and state-level forecast, Chaos Solitons Fractals, 140 (2020), 110165. doi: 10.1016/j.chaos.2020.110165
|
| [6] | S. Annas, Muh. Isbar Pratama, Muh. Rifandi, W. Sanusi, S. Side, Stability analysis and numerical simulation of SEIR model for pandemic COVID-19 spread in Indonesia, Chaos Solitons Fractals, 139 (2020), 110072. |
| [7] |
I. Cooper, A. Mondal, C. G. Antonopoulos, A SIR model assumption for the spread of COVID-19 in different communities, Chaos Solitons Fractals, 139 (2020), 110057. doi: 10.1016/j.chaos.2020.110057
|
| [8] |
A. Comunian, R. Gaburro, M. Giudici, Inversion of a SIR-based model: A critical analysis about the application to COVID-19 epidemic, Physica D, 413 (2020), 132674. doi: 10.1016/j.physd.2020.132674
|
| [9] |
C. Varotsos, J. Christodoulakis, A. Kouremadas, E. F. Fotaki, The Signature of the Coronavirus Lockdown in Air Pollution in Greece, Water Air Soil Pollut., 232 (2021), 119. doi: 10.1007/s11270-021-05055-w
|
| [10] | Z. Liu, P. Magal, O. Seydi, G. Webb, A COVID-19 epidemic model with latency period, Infect. Dis. Model., 5 (2020), 323–337. |
| [11] | R. Xu, Global dynamics of an SEIS epidemic model with saturation incidence and latent period, Appl. Math. Comput., 218 (2012), 7927–7938. |
| [12] | P. Yang, Y. Wang, Dynamics for an SEIRS epidemic model with time delay on a scale-free network, Physica A, 527 (2019), 121290. |
| [13] |
Y. Wang, J. Cao, G. Q. Sun, J. Li, Effect of time delay on pattern dynamics in a spatial epidemic model, Physica A, 412 (2014), 137–148. doi: 10.1016/j.physa.2014.06.038
|
| [14] |
Q.-M. Liu, C.-S. Deng, M.-C. Sun, The analysis of an epidemic model with time delay on scale-free networks, Physica A, 410 (2014), 79–87. doi: 10.1016/j.physa.2014.05.010
|
| [15] |
H. Lu, Y. Ding, S. Gong, S. Wang, Mathematical modeling and dynamic analysis of SIQR model with delay for pandemic COVID-19, Math. Biosci. Eng., 18 (2021), 3197–3214. doi: 10.3934/mbe.2021159
|
| [16] | D. Greenhalgh, Hopf Bifurcation in Epidemic Models with a Latent Period and Nonpermanent Immunity, Math. Comput. Model., 25 (1997), 85–107. |
| [17] | Y. Xie, Z. Wang, J. Lu, Y. Li, Stability analysis and control strategies for a new SIS epidemic model in heterogeneous networks, Appl. Math. Comput., 383 (2020), 125381. |
| [18] |
F. Wei, R. Xue, Stability and extinction of SEIR epidemic models with generalized nonlinear incidence, Math. Comput. Simul., 170 (2020), 1–15. doi: 10.1016/j.matcom.2018.09.029
|
| [19] |
Y. Yu, L. Ding, L. Lin, P. Hu, X. An, Stability of the SNIS epidemic spreading model with contagious incubation period over heterogeneous networks, Physica A, 526 (2019), 120878. doi: 10.1016/j.physa.2019.04.114
|
| [20] |
X. Wei, G. Xu, W. Zhou, Global stability of endemic equilibrium for a SIQRS epidemic model on complex networks, Physica A, 512 (2018), 203–214. doi: 10.1016/j.physa.2018.08.119
|
| [21] |
Z. Jiang, J. Wei, Stability and bifurcation analysis in a delayed SIR model, Chaos Solitons Fractals, 35 (2008), 609–619. doi: 10.1016/j.chaos.2006.05.045
|
| [22] |
Y. A. Kuznetsov, C. Piccardi, Bifurcation analysis of periodic SEIR and SIR epidemic models, J. Math. Biol., 32 (1994), 109–121. doi: 10.1007/BF00163027
|
| [23] |
H. L. Smith, Subharmonic Bifurcation in an S-I-R Epidemic Model, J. Math. Biol., 17 (1983), 163–177. doi: 10.1007/BF00305757
|
| [24] |
P. E. Kloeden, C. Pötzsche, Nonautonomous bifurcation scenarios in SIR models, Math. Meth. Appl. Sci., 38 (2015), 3495–3518. doi: 10.1002/mma.3433
|
| [25] |
J. Li, Z. Teng, G. Wang, L. Zhang, C. Hu, Stability and bifurcation analysis of an SIR epidemic model with logistic growth and saturated treatment, Chaos Solitons Fractals, 99 (2017), 63–71. doi: 10.1016/j.chaos.2017.03.047
|
| [26] | X.-Z. Li, W.-S. Li, M. Ghosh, Stability and bifurcation of an SIR epidemic model with nonlinear incidence and treatment, Appl. Math. Comput., 210 (2009), 141–150. |
| [27] |
Z. Hu, Z. Teng, L. Zhang, Stability and bifurcation analysis in a discrete SIR epidemic model, Math. Comput. Simul., 97 (2014), 80–93. doi: 10.1016/j.matcom.2013.08.008
|
| [28] |
J. Wang, S. Liu, B. Zheng, Y. Takeuchi, Qualitative and bifurcation analysis using an SIR model with a saturated treatment function, Math. Comput. Model., 55 (2012), 710–722. doi: 10.1016/j.mcm.2011.08.045
|
| [29] |
T. K. Kar, P. K. Mondal, Global dynamics and bifurcation in delayed SIR epidemic model, Nonlinear Anal. Real World Appl., 12 (2011), 2058–2068. doi: 10.1016/j.nonrwa.2010.12.021
|
| [30] | A. d'Onofrio, P. Manfredi, E. Salinelli, Bifurcation Thresholds in an SIR Model with Information-Dependent Vaccination, Math. Model. Nat. Phenom., 2 (2007), 3495–3518. |
| [31] | Y. Ding, W. Jiang, P. Yu, Hopf-zero bifurcation in a generalized Gopalsamy neural network model, Chaos Solitons Fractals, 70 (2012), 1037–1050. |
| [32] | Y. Wei, Z. Lu, Z. Du, Z. Zhang, Y. Zhao, S. Shen, Fitting and forecasting the trend of COVID-19 by $\mathrm{SEIR^{+CAQ}}$ dynamic model, Chin. J. Epidemiol., 41 (2020), 470–475, (Chinese). |
Figures(7) / Tables(1)

Shishi Wang, Yuting Ding, Hongfan Lu, Silin Gong. Stability and bifurcation analysis of $ SIQR $ for the COVID-19 epidemic model with time delay[J]. Mathematical Biosciences and Engineering, 2021, 18(5): 5505-5524. doi: 10.3934/mbe.2021278







 DownLoad:
DownLoad: