If a subset of vertices of a graph, designed in such a way that the remaining vertices have unique identification (usually called representations) with respect to the selected subset, then this subset is named as a metric basis (or resolving set). The minimum count of the elements of this subset is called as metric dimension. This concept opens the gate for different new parameters, like fault-tolerant metric dimension, in which the failure of any member of the designed subset is tolerated and the remaining subset fulfills the requirements of the resolving set. In the pattern of the resolving sets, a concept was introduced where the representations of edges must be unique instead of vertices. This concept was called the edge metric dimension, and this as well as the previously mentioned concepts belong to the idea of resolvability parameters in graph theory. In this paper, we find all the above resolving parametric sets of a convex polytope $ {F}_{♃} $ and compare their cardinalities.
Citation: Ali N. A. Koam. Metric based resolvability of cycle related graphs[J]. AIMS Mathematics, 2024, 9(4): 9911-9925. doi: 10.3934/math.2024485
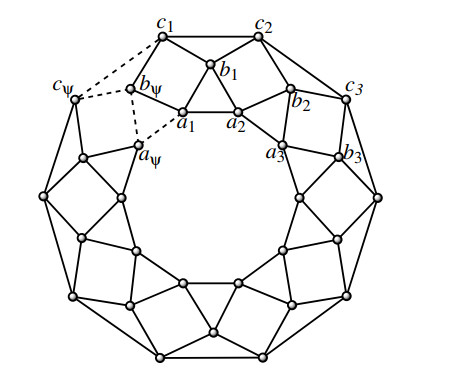
If a subset of vertices of a graph, designed in such a way that the remaining vertices have unique identification (usually called representations) with respect to the selected subset, then this subset is named as a metric basis (or resolving set). The minimum count of the elements of this subset is called as metric dimension. This concept opens the gate for different new parameters, like fault-tolerant metric dimension, in which the failure of any member of the designed subset is tolerated and the remaining subset fulfills the requirements of the resolving set. In the pattern of the resolving sets, a concept was introduced where the representations of edges must be unique instead of vertices. This concept was called the edge metric dimension, and this as well as the previously mentioned concepts belong to the idea of resolvability parameters in graph theory. In this paper, we find all the above resolving parametric sets of a convex polytope $ {F}_{♃} $ and compare their cardinalities.

| [1] |
M. Ahsan, Z. Zahid, S. Zafar, A. Rafiq, M. Sarwar Sindhu, M. Umar, Computing the edge metric dimension of convex polytopes related graphs, J. Math. Comput. Sci., 22 (2021), 174–188. http://doi.org/10.22436/jmcs.022.02.08 doi: 10.22436/jmcs.022.02.08

|
| [2] |
M. Azeem, M. F. Nadeem, Metric-based resolvability of polycyclic aromatic hydrocarbons, Eur. Phys. J. Plus, 136 (2021), 395. http://doi.org/10.1140/epjp/s13360-021-01399-8 doi: 10.1140/epjp/s13360-021-01399-8
|
| [3] |
J. Caceres, C. Hernando, M. Mora, I. M. Pelayo, M. L. Puertas, C. Seara, et al., On the metric dimension of Cartesian product of graphs, SIAM J. Discrete Math., 21 (2007), 423–441. http://doi.org/10.1137/050641867 doi: 10.1137/050641867
|
| [4] |
G. Chartrand, L. Eroh, M. A. Johnson, O. R. Oellermann, Resolvability in graphs and the metric dimension of a graph, Discrete Appl. Math., 105 (2000), 99–113. https://doi.org/10.1016/S0166-218X(00)00198-0 doi: 10.1016/S0166-218X(00)00198-0
|
| [5] | M. A. Chaudhry, I. Javaid, M. Salman, Fault-tolerant metric and partition dimension of graphs, Utilita Mathematica, 83 (2010), 187–199. |
| [6] | M. R. Garey, D. S. Johnson, Computers and intractability: A guide to the theory of NP-completeness, New York: W. H. Freeman and Company, 1979. |
| [7] | F. Harary, R. A. Melter, On the metric dimension of a graph, Ars Comb., 2 (1976), 191–195. |
| [8] | C. Hernando, M. Mora, P. J. Slater, D. R. Wood, Fault-tolerant metric dimension of graphs, In: Convexity in discrete structures, Ramanujan Mathematical Society Lecture Notes Series, 2008, 81–85. |
| [9] | I. Javaid, M. Salman, M. A. Chaudhry, S. Shokat, Fault-tolerance in resolvability, Utliltas Mathematica, 80 (2009), 263–275. |
| [10] |
A. Kelenc, N. Tratnik, I. G. Yero, Uniquely identifying the edges of a graph: the edge metric dimension, Discrete Appl. Math., 251 (2018), 204–220. https://doi.org/10.1016/j.dam.2018.05.052 doi: 10.1016/j.dam.2018.05.052
|
| [11] | S. Khuller, B. Raghavachari, A. Rosenfeld, Landmarks in graphs, Discrete Appl. Math., 70 (1996), 217–229. https://doi.org/10.1016/0166-218X(95)00106-2 |
| [12] |
A. N. A. Koam, A. Ahmad, Barycentric subdivision of Cayley graphs with constant edge metric dimension, IEEE Access, 8 (2020), 80624–80628. http://doi.org/10.1109/ACCESS.2020.2990109 doi: 10.1109/ACCESS.2020.2990109
|
| [13] |
J. B. Liu, M. F. Nadeem, H. M. A. Siddiqui, W. Nazir, Computing metric dimension of certain families of Toeplitz graphs, IEEE Access, 7 (2019), 126734–126741. http://doi.org/10.1109/ACCESS.2019.2938579 doi: 10.1109/ACCESS.2019.2938579
|
| [14] |
X. Ma, M. Feng, K. Wang, The strong metric dimension of the power graph of a finite group, Discrete Appl. Math., 239 (2018), 159–164. https://doi.org/10.1016/j.dam.2017.12.021 doi: 10.1016/j.dam.2017.12.021
|
| [15] |
P. D. Manuel, B. Rajan, I. Rajasingh, M. C. Monica, On minimum metric dimension of honeycomb networks, Journal of Discrete Algorithm, 6 (2008), 20–27. https://doi.org/10.1016/j.jda.2006.09.002 doi: 10.1016/j.jda.2006.09.002
|
| [16] |
R. A. Melter, I. Tomescu, Metric basis in digital geometry, Computer Vision, Graphics, and Image Processing, 25 (1984), 113–121. https://doi.org/10.1016/0734-189X(84)90051-3 doi: 10.1016/0734-189X(84)90051-3
|
| [17] |
M. F. Nadeem, M. Hassan, M. Azeem, S. U. D. Khan, M. R. Shaik, M. A. F. Sharaf, et al., Application of resolvability technique to investigate the different polyphenyl structures for polymer industry, J. Chem., 2021 (2021), 6633227. http://doi.org/10.1155/2021/6633227 doi: 10.1155/2021/6633227
|
| [18] |
M. F. Nadeem, M. Azeem, A. Khalil, The locating number of hexagonal Möbius ladder network, J. Appl. Math. Comput., 66 (2021), 149–165. http://doi.org/10.1007/s12190-020-01430-8 doi: 10.1007/s12190-020-01430-8
|
| [19] |
M. Perc, J. Gómez-Gardeñes, A. Szolnoki, L. M. Floría, Y. Moreno, Evolutionary dynamics of group interactions on structured populations: a review, J. R. Soc. Interface, 10 (2013), 20120997. http://doi.org/10.1098/rsif.2012.0997 doi: 10.1098/rsif.2012.0997
|
| [20] |
M. Perc, A. Szolnoki, Coevolutionary games—A mini review, Biosystems, 99 (2010), 109–125. https://doi.org/10.1016/j.biosystems.2009.10.003 doi: 10.1016/j.biosystems.2009.10.003
|
| [21] |
I. Peterin, I. G. Yero, Edge metric dimension of some graph operations, Bull. Malays. Math. Sci. Soc., 43 (2020), 2465–2477. http://doi.org/10.1007/s40840-019-00816-7 doi: 10.1007/s40840-019-00816-7
|
| [22] |
Z. Raza, M. S. Bataineh, The comparative analysis of metric and edge metric dimension of some subdivisions of the wheel graph, Asian-Eur. J. Math., 14 (2021), 2150062. https://doi.org/10.1142/S1793557121500625 doi: 10.1142/S1793557121500625
|
| [23] |
H. Raza, S. Hayat, M. Imran, X. F. Pan, Fault-tolerant resolvability and extremal structures of graphs, Mathematics, 7 (2019), 78–97. http://doi.org/10.3390/math7010078 doi: 10.3390/math7010078
|
| [24] |
H. Raza, S. Hayat, X. F. Pan, On the fault-tolerant metric dimension of certain interconnection networks, J. Appl. Math. Comput., 60 (2019), 517–535. http://doi.org/10.1007/s12190-018-01225-y doi: 10.1007/s12190-018-01225-y
|
| [25] |
H. Raza, S. Hayat, X. F. Pan, On the fault-tolerant metric dimension of convex polytopes, Appl. Math. Comput., 339 (2018), 172–185. https://doi.org/10.1016/j.amc.2018.07.010 doi: 10.1016/j.amc.2018.07.010
|
| [26] |
S. W. Saputro, R. Simanjuntak, S. Uttunggadewa, H. Assiyatun, E. T. Baskoro, A. N. M. Salman, et al., The metric dimension of the lexicographic product of graphs, Discrete Math., 313 (2013), 1045–1051. https://doi.org/10.1016/j.disc.2013.01.021 doi: 10.1016/j.disc.2013.01.021
|
| [27] |
A. Sebő, E. Tannier, On metric generators of graphs, Math. Oper. Res., 29 (2004), 383–393. http://doi.org/10.1287/moor.1030.0070 doi: 10.1287/moor.1030.0070
|
| [28] | P. J. Slater, Leaves of trees, In: Proceeding of the 6th Southeastern Conference on Combinatorics, Graph Theory, and Computing, Congressus Numerantium, 1975,549–559. |
| [29] |
M. Somasundari, F. S. Raj, Fault-tolerant resolvability of oxide interconnections, International Journal of Innovative Technology and Exploring Engineering, 8 (2019), 2278–3075. http://doi.org/10.35940/ijitee.L3245.1081219 doi: 10.35940/ijitee.L3245.1081219
|
| [30] |
S. Söderberg, H. S. Shapiro, A combinatory detection problem, The American Mathematical Monthly, 70 (1963), 1066–1070. http://doi.org/10.1080/00029890.1963.11992174 doi: 10.1080/00029890.1963.11992174
|
| [31] |
B. Yang, M. Rafiullah, H. M. A. Siddiqui, S. Ahmad, On resolvability parameters of some wheel-related graphs, J. Chem., 2019 (2019), 9259032. http://doi.org/10.1155/2019/9259032 doi: 10.1155/2019/9259032
|
| [32] |
I. G. Yero, Vertices, edges, distances and metric dimension in graphs, Electronic Notes in Discrete Mathematics, 55 (2016), 191–194. https://doi.org/10.1016/j.endm.2016.10.047 doi: 10.1016/j.endm.2016.10.047
|
| [33] |
Y. Zhang, S. Gao, On the edge metric dimension of convex polytopes and its related graphs, J. Comb. Optim., 39 (2020), 334–350. http://doi.org/10.1007/s10878-019-00472-4 doi: 10.1007/s10878-019-00472-4
|
Figures(1) / Tables(1)

Ali N. A. Koam. Metric based resolvability of cycle related graphs[J]. AIMS Mathematics, 2024, 9(4): 9911-9925. doi: 10.3934/math.2024485







 DownLoad:
DownLoad: