Pipes and offsets are the sets obtained by displacing the points of their progenitor $ S $ (i.e., spine curve or base surface, respectively) a constant distance $ d $ along normal lines. We review existing results and elucidate the relationship between the smoothness of pipes/offsets and the reach $ R $ of the progenitor, a fundamental concept in Federer's celebrated paper where he introduced the family of sets with positive reach. Most CAD literature on pipes/offsets overlooks this concept despite its relevance, so we remedy this deficiency with this survey. The reach admits a geometric interpretation, as the minimal distance between $ S $ and its cut locus. For a closed $ S $, the condition $ d < R $ means a singularity-free pipe/offset, coinciding with the level set at a distance $ d $ from the progenitor. This condition also implies that pipes/offsets inherit the smoothness class $ C^k $, $ k\ge1 $, of a closed progenitor. These results hold in spaces of arbitrary dimension, for pipe hypersurfaces from spines or offsets to base hypersurfaces.
Citation: Javier Sánchez-Reyes, Leonardo Fernández-Jambrina. On the reach and the smoothness class of pipes and offsets: a survey[J]. AIMS Mathematics, 2022, 7(5): 7742-7758. doi: 10.3934/math.2022435
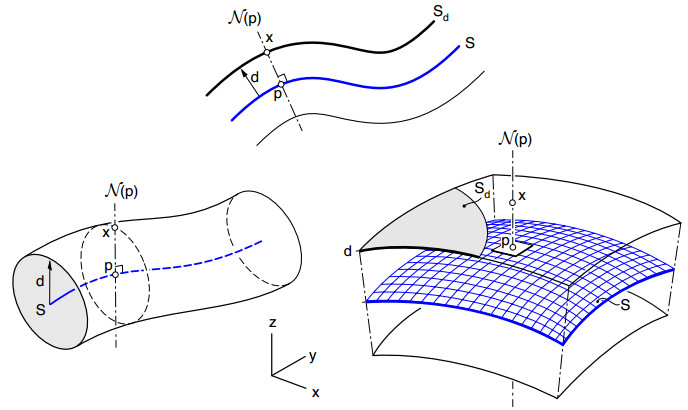
Pipes and offsets are the sets obtained by displacing the points of their progenitor $ S $ (i.e., spine curve or base surface, respectively) a constant distance $ d $ along normal lines. We review existing results and elucidate the relationship between the smoothness of pipes/offsets and the reach $ R $ of the progenitor, a fundamental concept in Federer's celebrated paper where he introduced the family of sets with positive reach. Most CAD literature on pipes/offsets overlooks this concept despite its relevance, so we remedy this deficiency with this survey. The reach admits a geometric interpretation, as the minimal distance between $ S $ and its cut locus. For a closed $ S $, the condition $ d < R $ means a singularity-free pipe/offset, coinciding with the level set at a distance $ d $ from the progenitor. This condition also implies that pipes/offsets inherit the smoothness class $ C^k $, $ k\ge1 $, of a closed progenitor. These results hold in spaces of arbitrary dimension, for pipe hypersurfaces from spines or offsets to base hypersurfaces.

| [1] | R. E. Barnhill, Geometry Processing for Design and Manufacturing, Philadelphia: SIAM, 1992. |
| [2] | N. M. Patrikalakis, T. Maekawa, Shape interrogation for Computer Aided Design and Manufacturing, Berlin: Springer, 2002. |
| [3] | J. Hoschek, D. Lasser, Fundamentals of Computer Aided Geometric Design, Wellesley, MA: AK Peters, 1993. |
| [4] | H. Pottmann, A. Asperl, M. Hofer, A. Kilian, Architectural geometry, Exton: Bentley Institute Press, 2007. |
| [5] | H. Pottmann, M. Eigensatz, A. Vaxman, J. Wallner, Architectural geometry, Comput. Graph., 47 (2015), 145–164. https://doi.org/10.1016/j.cag.2014.11.002 |
| [6] |
T. Maekawa, N. M. Patrikalakis, T. Sakkalis, G. Yu, Analysis and applications of pipe surfaces, Comput. Aided Geom. Des., 15 (1998), 437–458. https://doi.org/10.1016/S0167-8396(97)00042-3 doi: 10.1016/S0167-8396(97)00042-3

|
| [7] | M. do Carmo, Differential Geometry of Curves and Surfaces, Upper Saddle River, NJ: Prentice-Hall, 1976. |
| [8] | A. Gray, E. Abbena, S. Salomon, Modern Differential Geometry of Curves and Surfaces with Mathematica, 3rd Ed., Boca Raton, FL: Chapman & Hall/CRC, 2006. |
| [9] |
T. Maekawa, An overview of offset curves and surfaces, Comput.-Aided Des., 31 (1999), 165–163. https://doi.org/10.1016/S0010-4485(99)00013-5 doi: 10.1016/S0010-4485(99)00013-5
|
| [10] |
J. G. Alcázar, J. R. Sendra, Local shape of offsets to algebraic curves, J. Symb. Comput., 42 (2007), 38–351. https://doi.org/10.1016/j.jsc.2006.12.001 doi: 10.1016/j.jsc.2006.12.001
|
| [11] |
J. G. Alcázar, Good local behavior of offsets to rational regular algebraic surfaces, J. Symb. Comput., 43 (2008), 845–857. https://doi.org/10.1016/j.jsc.2008.04.001 doi: 10.1016/j.jsc.2008.04.001
|
| [12] | J. G. Alcázar, Good global behavior of offsets to plane algebraic curves J. Symb. Comput., 43 (2008), 659–680. https://doi.org/10.1016/j.jsc.2008.01.003 |
| [13] | H. Federer, Curvature measures, Trans. Amer. Math. Soc., 93 (1959), 418–491. |
| [14] |
J. Wallner, T. Sakkalis, T. Maekawa, H. Pottmann, G. Yu, Self-intersections of offset curves and surfaces, International Journal of Shape Modeling, 7 (2001), 1–21. https://doi.org/10.1142/S0218654301000023 doi: 10.1142/S0218654301000023
|
| [15] |
T. Sakkalis, T. J. Peters, J. Bisceglio, Isotopic approximations and interval solids, Comput.-Aided Des., 36 (2014), 1089–1100. https://doi.org/10.1016/j.cad.2004.01.008 doi: 10.1016/j.cad.2004.01.008
|
| [16] |
T. Hermann, On the smoothness of offset surfaces, Comput. Aided Geom. Des., 15 (1998), 529–533. https://doi.org/10.1016/S0167-8396(98)00002-8 doi: 10.1016/S0167-8396(98)00002-8
|
| [17] | J. Peters, Geometric continuity, in: G. Farin, J. Hoschek, M.-S. Kim (Eds.), Handbook of Computer Aided Geometric Design, North Holland/Elsevier, (2002), 193–227. https://doi.org/10.1016/B978-044451104-1/50009-5 |
| [18] | G. Farin, NURBS: from Projective Geometry to Practical Use, 2th ed., Natick, MA: AK Peters, 1999. |
| [19] | G. Farin, Curves and surfaces for CAGD: a practical guide, 5th ed., San Francisco, CA: Morgan Kaufmann, 2002. |
| [20] | M. Spiegel, Differential Geometry, New York: Schaum McGraw-Hill, 1969. |
| [21] | M. Berger, B. Gostiaux, Differential Geometry: Manifolds, Curves and Surfaces, New York: Springer, 1988. |
| [22] | V. Peters, Solid Modeling, in: G. Farin, J. Hoschek, M.-S. Kim (Eds.), Handbook of Computer Aided Geometric Design, North Holland/Elsevier, 2002. https://doi.org/10.1016/B978-044451104-1/50021-6 |
| [23] | K. Lucas, Submanifolds of dimension $n-1$ in $E^n$ with normals satisfying a Lipschitz condition, Studies in Eigenvalue Problems, Technical Report 18, Department of Mathematics, University of Kansas, 1957, Sect. 2. |
| [24] |
M. Ghomi, R. Howard, Tangent cones and regularity of real hypersurfaces, J. Reine Angew. Math., 697 (2014), 221–247. https://doi.org/10.1515/crelle-2013-0091 doi: 10.1515/crelle-2013-0091
|
| [25] |
M. W. Jones, J. A. Bærentzen, M. Sramek, 3D Distance Fields: A Survey of Techniques and Applications, IEEE Trans. Vis. Comput. Graph., 12 (2006), 581–599. https://doi.org/10.1109/TVCG.2006.56 doi: 10.1109/TVCG.2006.56
|
| [26] | C. Thäle, 50 years sets with positive reach - a survey -, Surv. Math. Appl., 3 (2008), 123–165. |
| [27] |
J. Wallner, Self-intersections and smoothness of general offset surfaces, J. Geom., 70 (2001), 176–190. https://doi.org/10.1142/S0218654301000023 doi: 10.1142/S0218654301000023
|
| [28] |
R. T. Farouki, Exact offset procedures for simple solids, Comput. Aided Geom. Des., 2 (1985), 257–279. https://doi.org/10.1016/S0167-8396(85)80002-9 doi: 10.1016/S0167-8396(85)80002-9
|
| [29] | R. L. Foote, Regularity of the distance function, Proc. Am. Math. Soc., 92 (1984), 153–155. https://doi.org/2045171 |
| [30] |
R. T. Farouki, C. A. Neff, Analytic properties of plane offset curves, Comput. Aided Geom. Des., 7 (1990), 83–99. https://doi.org/10.1016/0167-8396(90)90023-K doi: 10.1016/0167-8396(90)90023-K
|
| [31] | R. T. Farouki, Pythagorean-Hodograph Curves: Algebra and Geometry Inseparable, Berlin: Springer, 2008. |
| [32] |
J.-K. Seong, G. Elber, M.-S. Kim, Trimming local and global self-intersections in offset curves/surfaces using distance maps, Comput. Aided Geom. Des., 29 (2006), 555–564. https://doi.org/10.1016/j.cad.2005.08.002 doi: 10.1016/j.cad.2005.08.002
|
| [33] |
J.-J. Kim, J. Lee, M.-S. Kim, G. Elber, Efficient offset trimming for planar rational curves using biarc trees, Comput.-Aided Des., 29 (2012), 183–193. https://doi.org/10.1016/j.cagd.2012.03.014 doi: 10.1016/j.cagd.2012.03.014
|
| [34] |
J. G. Alcázar, J. Caravantes, G. M. Diaz-Toca, A new method to compute the singularities of offsets to rational plane curves, J. Comput. Appl. Math., 290 (2015), 385–402. https://doi.org/10.1016/j.cam.2015.06.001 doi: 10.1016/j.cam.2015.06.001
|
| [35] |
Q. Y. Hong, Y. Park, M.-S. Kim, G. Elber, Trimming offset surface self-intersections around near-singular regions, Comput. Graph., 82 (2019), 84–94. https://doi.org/10.1016/j.cag.2019.05.016 doi: 10.1016/j.cag.2019.05.016
|
| [36] | F. E. Wolter, Cut Locus and Medial Axis in Global Shape Interrogation and Representation, technical report, MIT, 1993. |
| [37] |
E. C. Sherbrooke, N.M. Patrikalakis, F.-E. Wolter, Differential and Topological Properties of Medial Axis Transforms, Graphical Models and Image processing, 58 (1996), 574–592. https://doi.org/10.1016/j.cag.2019.05.016 doi: 10.1016/j.cag.2019.05.016
|
| [38] |
E. Kosinka, Z. Šír, $C^2$ Hermite interpolation by Minkowski Pythagorean hodograph curves and medial axis transform approximation, Comput. Aided Geom. Des., 27 (2010), 631–643. https://doi.org/10.1016/j.cagd.2010.04.005 doi: 10.1016/j.cagd.2010.04.005
|
| [39] |
M. Bizzarri, M. Lávička, J. Vrček, Linear computational approach to interpolations with polynomial Minkowski Pythagorean hodograph curves, J. Comput. Appl. Math., 361 (2019), 283–295. https://doi.org/10.1016/j.cam.2019.04.029 doi: 10.1016/j.cam.2019.04.029
|
| [40] | M. Bizzarri, M. Lávička, Interpolation of Hermite data by clamped Minkowski Pythagorean hodograph B-spline curves, J. Comput. Appl. Math., 392 (2021). https://doi.org/10.1016/j.cam.2021.113469 |
| [41] | F. Chazal, D. Cohen-Steiner, A. Lieutier, B. Thibert, Shape smoothing using double offsets, SPM '07: Proceedings of the 2007 ACM symposium on Solid and physical modeling, (2007), 133–158. |
| [42] | F. Chazal, D. Cohen-Steiner, A. Lieutier, Q. Mérigot, B. Thibert, Inference of Curvature Using Tubular Neighborhoods. In: Najman L., Romon P. (eds), Modern Approaches to Discrete Curvature. Lecture Notes in Mathematics, 2184 (2017), 133–158, Springer. |
| [43] |
E. Horobeţ, M. Weinstein, Offset hypersurfaces and persistent homology of algebraic varieties, Comput. Aided Geom. Des., 74 (2019), 101767. https://doi.org/10.1016/j.cagd.2019.101767 doi: 10.1016/j.cagd.2019.101767
|
| [44] |
R. Ramamurthy, R. T. Farouki, Voronoi diagram and medial axis algorithm for planar domains with curved boundaries I. Theoretical foundations, J. Comput. Appl. Math., 102 (1999), 119–141. https://doi.org/10.1016/S0377-0427(98)00211-8 doi: 10.1016/S0377-0427(98)00211-8
|
| [45] |
R. Ramamurthy, R. T. Farouki, Voronoi diagram and medial axis algorithm for planar domains with curved boundaries — II. Detailed algorithm description, J. Comput. Appl. Math., 102 (1999), 253–277. https://doi.org/10.1016/S0377-0427(98)00223-4 doi: 10.1016/S0377-0427(98)00223-4
|
| [46] | S. G. Krantz, H. R. Parks, The Implicit Function Theorem: History, Theory and Applications, Springer, 2003. |
| [47] | S. G. Krantz, H. R. Parks, Distance to $C^k$ Hypersurfaces, J. Differ. Equ., 40 (1981), 116–120. |
| [48] | D. Gilbarg, N. Trudinger, Elliptic Partial Differential Equations of Second Order, Berlin: Springer, 1977. |
| [49] | S. G. Krantz, H. R. Parks, The Geometry of Domains in Space, Boston, USA: Birkhäuser, 1999. |
| [50] | E. Giusti, Minimal Surfaces and Functions of Bounded Variation, Boston, USA: Birkhäuser, 1984. |
| [51] | S. Gallot, D. Hulin, J. Lafontaine, Riemannian Geometry, Berlin: Springer, 2004. |
| [52] |
N. Kleinjohann, Nächste Punkte in der Riemannschen Geometrie, Math. Zeit., 38 (1981), 327–344. https://doi.org/10.1007/BF01214610 doi: 10.1007/BF01214610
|
| [53] | V. Bangert, Sets with positive reach, Arch. Math, 38 (1982), 54–57. https: //doi.org/10.1007/BF01304757 |
| [54] |
C. Mantegazza, A. C. Mennucci, Hamilton-Jacobi Equations and Distance Functions on Riemannian Manifolds, Appl. Math. Optim., 47 (2003), 1–25. https://doi.org/10.1007/s00245-002-0736-4 doi: 10.1007/s00245-002-0736-4
|
| [55] |
R. Farouki, The approximation of non-degenerate offset surfaces, Comput. Aided Geom. Des., 3 (1986), 15–43. https://doi.org/10.1016/0167-8396(86)90022-1 doi: 10.1016/0167-8396(86)90022-1
|
| [56] |
E. Arrondo, J. Sendra, J. R. Sendra, Parametric generalized offsets to hypersurfaces, J. Symb. Comput., 23 (1997), 267–285. https://doi.org/10.1006/jsco.1996.0088 doi: 10.1006/jsco.1996.0088
|
| [57] |
J. R. Sendra, J. Sendra, Algebraic analysis of offsets to hypersurfaces, Math. Z., 234 (2000), 697–719. https://doi.org/10.1007/s002090050004 doi: 10.1007/s002090050004
|
| [58] |
J. G. Alcázar, Local shape of generalized offsets to algebraic curves, J. Symb. Comput., 47 (2012), 327–341. https://doi.org/10.1016/j.jsc.2011.12.001 doi: 10.1016/j.jsc.2011.12.001
|
| [59] |
X. Chen, Q. Lin, Properties of generalized offset curves and surfaces, J. Appl. Math., 13 (2014), 124240. https://doi.org/10.1155/2014/124240 doi: 10.1155/2014/124240
|
| [60] |
V. Bulut, A. Caliskan, The exchange variations of offset curves and surfaces, Results Math., 67 (2015), 303–332. https://doi.org/10.1007/s00025-015-0445-3 doi: 10.1007/s00025-015-0445-3
|










Figures(11)

Javier Sánchez-Reyes, Leonardo Fernández-Jambrina. On the reach and the smoothness class of pipes and offsets: a survey[J]. AIMS Mathematics, 2022, 7(5): 7742-7758. doi: 10.3934/math.2022435







 DownLoad:
DownLoad: