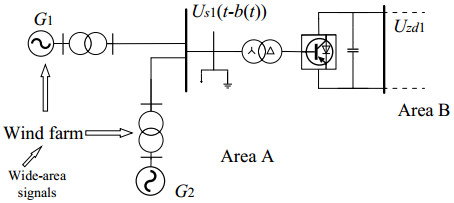
In the process of large-scale wind farms integration, the time delay is usually caused by the introduction of wide area control signal, which leads to the unstable operation of integrated transmission system. In order to solve this problem, using the control principle of interconnection and damping assignment passivity-based (IDA-PB), this paper puts forward a control method which applies voltage source converter high voltage direct current (VSC-HVDC) technology to the integrated system of time-delay wind farm and keeps the system running stably. In this method, the framework of time-delay port controlled Hamiltonian (PCH) system is constructed, and the energy shaping of the system is carried out by extending the IDA-PB control principle, thus the feedback controller of the system is designed. Around the problem of time-delay stabilization, the stability criterion is obtained by constructing Lyapunov-Krasovskii functional and introducing free weighting matrices. Finally, the simulation results show that the proposed method can effectively solve the time delay problem of the integrated transmission system and avoid the performance deterioration of the system.
Citation: Gaoran Wang, Weiwei Sun, Shuqing Wang. Stabilization of wind farm integrated transmission system with input delay[J]. AIMS Mathematics, 2021, 6(9): 9177-9193. doi: 10.3934/math.2021533
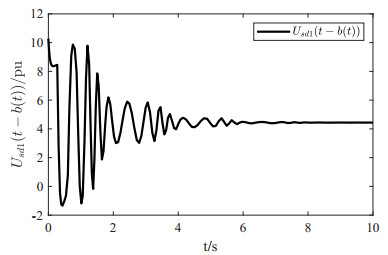
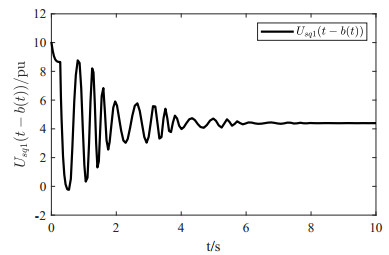
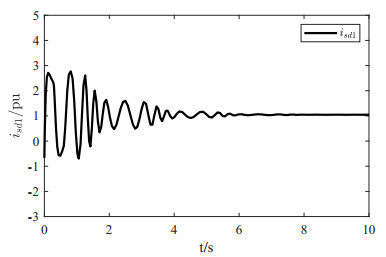
In the process of large-scale wind farms integration, the time delay is usually caused by the introduction of wide area control signal, which leads to the unstable operation of integrated transmission system. In order to solve this problem, using the control principle of interconnection and damping assignment passivity-based (IDA-PB), this paper puts forward a control method which applies voltage source converter high voltage direct current (VSC-HVDC) technology to the integrated system of time-delay wind farm and keeps the system running stably. In this method, the framework of time-delay port controlled Hamiltonian (PCH) system is constructed, and the energy shaping of the system is carried out by extending the IDA-PB control principle, thus the feedback controller of the system is designed. Around the problem of time-delay stabilization, the stability criterion is obtained by constructing Lyapunov-Krasovskii functional and introducing free weighting matrices. Finally, the simulation results show that the proposed method can effectively solve the time delay problem of the integrated transmission system and avoid the performance deterioration of the system.

| [1] | T. An, G. Tang, W. Wang, Research and application on multi-terminal and DC grids based on VSC-HVDC technology in China, High Volt., 2 (2017), 1–10. |
| [2] | Y. F. Guo, H. L. Gao, Q. W. Wu, H. R. Zhao, J. Ostergaard, M. Shahidehpour, Enhanced voltage control of VSC-HVDC connected offshore wind farms based on model predictive control, IEEE T. Sustain. Energ., 9 (2018), 474–487. |
| [3] | H. Z. Liu, Z. Chen, Contribution of VSC-HVDC to frequency regulation of power systems with offshore wind generation, IEEE T. Energy Conver., 30 (2015), 918–926. |
| [4] | J. Lin, Integrating the first HVDC-based offshore wind power into PJM system–A real project case study, IEEE T. Ind. Appl., 52 (2016), 1970–1978. |
| [5] | B. B. Shao, S. Q. Zhao, Y. H. Yang, B. F. Gao, F. Blaabjerg, Sub-synchronous oscillation characteristics and analysis of direct-drive wind farms with VSC-HVDC systems, IEEE T. Sustain. Energ., 12 (2021), 1127–1140. |
| [6] | S. B. Wang, X. Y. Meng, T. W. Chen, Wide-area control of power systems through delayed network communication, IEEE T. Contr. Syst. T., 20 (2012), 495–503. |
| [7] | B. Chaudhuri, R. Majumder, B. C. Pal, Wide-area measurement-based stabilizing control of power system considering signal transmission delay, IEEE T. Power Syst., 19 (2004), 1971–1979. |
| [8] | B. Yang, Y. Z. Sun, Damping factor based delay margin for wide area signals in power system damping control, IEEE T. Power Syst., 28 (2013), 3501–3502. |
| [9] | M. Li, Y. Chen, Wide-area stabiliser on sliding mode control for cross-area power systems with random delay and packet dropouts, Asian J. Control, 20 (2018), 2130–2142. |
| [10] | K. T. Yu, Y. M. Li, Adaptive fuzzy control for nonlinear systems with sampled data and time-varying input delay, AIMS Mathematics, 5 (2020), 2307–2325. |
| [11] | D. Yang, X. D. Li, J. L. Qiu, Output tracking control of delayed switched systems via state-dependent switching and dynamic output feedback, Nonlinear Anal.-Hybri., 32 (2019), 294–305. |
| [12] | X. Y. Yang, X. D. Li, Q. Xi, P. Y. Duan, Review of stability and stabilization for impulsive delayed systems, Math. Biosci. Eng., 15 (2018), 1495–1515. |
| [13] | W. W. Sun, M. Y. Qiu, X. Y. Lv, H$_\infty$ filter design for a class of delayed Hamiltonian systems with fading channel and sensor saturation, AIMS Mathematics, 5 (2020), 2909–2922. |
| [14] | Y. Liu, N. Chopra, Gravity-compensation-driven position regulation for robotic systems under input/output delays, IEEE T. Contr. Syst. T., 22 (2014), 995–1005. |
| [15] | S. Ahmed, H. P. Wang, M. S. Aslam, I. Ghous, I. Qaisar, Robust adaptive control of robotic manipulator with input time-varying delay, Int. J. Control, Autom. Syst., 17 (2019), 2193–2202. |
| [16] | Y. Kang, Z. J. Li, X. Q. Cao, D. H. Zhai, Robust control of motion/force for robotic manipulators with random time delays, IEEE T. Contr. Syst. T., 21 (2013), 1708–1718. |
| [17] | Q. He, J. K. Liu, An observer for a velocity-sensorless VTOL aircraft with time-varying measurement delay, Int. J. Syst. Sci., 47 (2016), 652–661. |
| [18] | S. W. Su, Y. Lin, Output tracking control for a velocity-sensorless VTOL aircraft with measurement delays, Int. J. Syst. Sci., 46 (2015), 885–895. |
| [19] | X. J. Jin, G. D. Yin, Y. J. Li, J. Q. Li, Stabilizing vehicle lateral dynamics with considerations of state delay of AFS for electric vehicles via robust gain-scheduling control, Asian J. Control, 18 (2016), 89–97. |
| [20] | M. Z. Huang, W. N. Gao, Z. P. Jiang, Connected cruise control with delayed feedback and disturbance: An adaptive dynamic programming approach, Int. J. Adapt. Control., 33 (2019), 356–370. |
| [21] | S. Y. Han, G. Y. Tang, Y. H. Chen, X. X. Yang, X. Yang, Optimal vibration control for vehicle active suspension discrete-time systems with actuator time delay, Asian J. Control, 15 (2013), 1579–1588. |
| [22] | D. Soudbakhsh, A. Chakrabortty, A. M. Annaswamy, A delay-aware cyber-physical architecture for wide-area control of power systems, Control Eng. Pract., 60 (2017), 171–182. |
| [23] | D. Efimov, J. Schiffer, R. Ortega, Robustness of delayed multistable systems with application to droop-controlled inverter-based microgrids, Int. J. Control, 89 (2016), 909–918. |
| [24] | J. Li, Z. H. Chen, D. S. Cai, W. Zhen, Q. Huang, Delay-dependent stability control for power system with multiple time-delays, IEEE T. Power Syst., 31 (2016), 2316–2326. |
| [25] | X. Li, R. Wang, S. Wu, S. N. Wu, G. M. Dimirovski, Exponential stability for multi-area power systems with time delays under load frequency controller failures, Asian J. Control, 19 (2017), 787–791. |
| [26] | H. Luo, I. A. Hiskens, Z. Hu, Stability analysis of load frequency control systems with sampling and transmission delay, IEEE T. Power Syst., 35 (2020), 3603–3615. |
| [27] | S. P. Wen, X. H. Yu, Z. G. Zeng, J. J. Wang, Event-triggering load frequency control for multiarea power systems with communication delays, IEEE T. Ind. Electron., 63 (2016), 1308–1317. |
| [28] | Y. H. Gui, C. H. Kim, C. C. Chung, Improved low-voltage ride through capability for PMSG wind turbine based on port-controlled hamiltonian system, Int. J. Control Autom. Syst., 14 (2016), 1195–1204. |
| [29] | H. H. Song, Y. B. Qu, Energy-based modelling and control of wind energy conversion system with DFIG, Int. J. Control, 84 (2011), 281–292. |
| [30] | W. W. Sun, Y. Wu, L. P. Wang, Trajectory tracking of constrained robotic systems via a hybrid control strategy, Neurocomputing, 330 (2019), 188–195. |
| [31] | Y. Ren, W. W. Sun, Robust adaptive control for robotic systems with input time-varying delay using Hamiltonian method, IEEE/CAA J. Automat., 5 (2018), 852–859. |
| [32] | Y. Guo, Z. Xi, D. Cheng, Speed regulation of permanent magnet synchronous motor via feedback dissipative Hamiltonian realisation, IET Control Theory A., 1 (2007), 281–290. |
| [33] | A. Yaghmaei, M. J. Yazdanpanah, Structure preserving observer design for port-Hamiltonian systems, IEEE T. Automat. Contr, 64 (2019), 1214–1220. |
| [34] | X. M. Fan, L. Guan, C. J. Xia, T. Y. Ji, IDA-PB control design for VSC-HVDC transmission based on PCHD model, Int. T. Electr. Energy., 25 (2015), 2133–2143. |
| [35] | S. Y. Dai, X. F. Koutsoukos, Safety analysis of integrated adaptive cruise and lane keeping control using multi-modal port-Hamiltonian systems, Nonlinear Anal.-Hybri., 35 (2020), 100816. |
| [36] | S. Aoues, F. L. Cardoso-Ribeiro, D. Matignon, D. Alazard, Modeling and control of a rotating flexible spacecraft: A port-Hamiltonian approach, IEEE T. Contr. Syst. T., 27 (2019), 355–362. |
| [37] | W. W. Sun, B. Z. Fu, Adaptive control of time-varying uncertain nonlinear systems with input delay: A Hamiltonian approach, IET Control Theory A., 10 (2016), 1844–1858. |
| [38] | W. W. Sun, X. Y. Lv, K. L. Wang, L. P. Wang, Observer-based output feedback stabilisation and $L_2$-disturbance attenuation of uncertain Hamiltonian systems with input and output delays, Int. J. Syst. Sci., 50 (2019), 2565–2578. |
| [39] | J. Schiffer, E. Fridman, R. Ortega, J. Raischde, Stability of a class of delayed port-Hamiltonian systems with application to microgrids with distributed rotational and electronic generation, Automatica, 74 (2016), 71–79. |

Figures(7)

Gaoran Wang, Weiwei Sun, Shuqing Wang. Stabilization of wind farm integrated transmission system with input delay[J]. AIMS Mathematics, 2021, 6(9): 9177-9193. doi: 10.3934/math.2021533







 DownLoad:
DownLoad: