This paper investigated the problem of multiview subspace clustering, focusing on feature learning with submanifold structure and exploring the invariant representations of multiple views. A novel approach was proposed in this study, termed deep Grassmannian multiview subspace clustering with contrastive learning (DGMVCL). The proposed algorithm initially utilized a feature extraction module (FEM) to map the original input samples into a feature subspace. Subsequently, the manifold modeling module (MMM) was employed to map the aforementioned subspace features onto a Grassmannian manifold. Afterward, the designed Grassmannian manifold network was utilized for deep subspace learning. Finally, discriminative cluster assignments were achieved utilizing a contrastive learning mechanism. Extensive experiments conducted on five benchmarking datasets demonstrate the effectiveness of the proposed method. The source code is available at https://github.com/Zoo-LLi/DGMVCL.
Citation: Rui Wang, Haiqiang Li, Chen Hu, Xiao-Jun Wu, Yingfang Bao. Deep Grassmannian multiview subspace clustering with contrastive learning[J]. Electronic Research Archive, 2024, 32(9): 5424-5450. doi: 10.3934/era.2024252
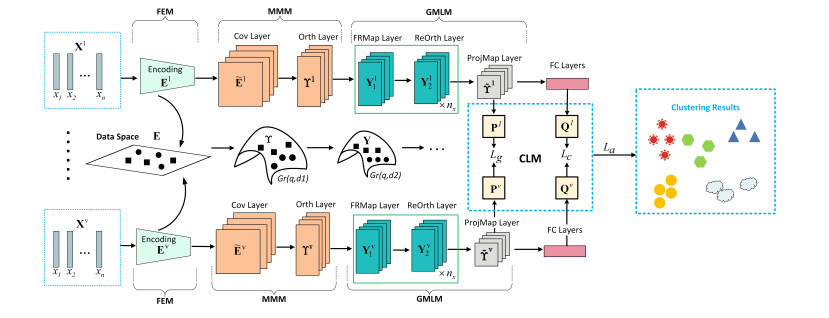
This paper investigated the problem of multiview subspace clustering, focusing on feature learning with submanifold structure and exploring the invariant representations of multiple views. A novel approach was proposed in this study, termed deep Grassmannian multiview subspace clustering with contrastive learning (DGMVCL). The proposed algorithm initially utilized a feature extraction module (FEM) to map the original input samples into a feature subspace. Subsequently, the manifold modeling module (MMM) was employed to map the aforementioned subspace features onto a Grassmannian manifold. Afterward, the designed Grassmannian manifold network was utilized for deep subspace learning. Finally, discriminative cluster assignments were achieved utilizing a contrastive learning mechanism. Extensive experiments conducted on five benchmarking datasets demonstrate the effectiveness of the proposed method. The source code is available at https://github.com/Zoo-LLi/DGMVCL.

| [1] |
M. C. Tsakiris, R. Vidal, Algebraic clustering of affine subspaces, IEEE Trans. Pattern Anal. Mach. Intell., 40 (2017), 482–489. https://doi.org/10.1109/TPAMI.2017.2678477 doi: 10.1109/TPAMI.2017.2678477

|
| [2] | C. You, C. G. Li, D. P. Robinson, R. Vidal, Is an affine constraint needed for affine subspace clustering?, in Proceedings of the IEEE/CVF International Conference on Computer Vision, (2019), 9915–9924. |
| [3] | P. Ji, M. Salzmann, H. Li, Shape interaction matrix revisited and robustified: Efficient subspace clustering with corrupted and incomplete data, in Proceedings of the IEEE International Conference on computer Vision, (2015), 4687–4695. |
| [4] |
J. Yang, J. Liang, K. Wang, P. L. Rosin, M. H. Yang, Subspace clustering via good neighbors, IEEE Trans. Pattern Anal. Mach. Intell., 42 (2019), 1537–1544. https://doi.org/10.1109/TPAMI.2019.2913863 doi: 10.1109/TPAMI.2019.2913863
|
| [5] | A. Gruber, Y. Weiss, Multibody factorization with uncertainty and missing data using the EM algorithm, in Proceedings of the 2004 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, (2004), 1–1. https://doi.org/10.1109/CVPR.2004.1315101 |
| [6] | S. R. Rao, R. Tron, R. Vidal, Y. Ma, Motion segmentation via robust subspace separation in the presence of outlying, incomplete, or corrupted trajectories, in 2008 IEEE Conference on Computer Vision and Pattern Recognition, (2008), 1–8. https://doi.org/10.1109/CVPR.2008.4587437 |
| [7] |
E. Elhamifar, R. Vidal, Sparse subspace clustering: Algorithm, theory, and applications, IEEE Trans. Pattern Anal. Mach. Intell., 35 (2013), 2765–2781. https://doi.org/10.1109/TPAMI.2013.57 doi: 10.1109/TPAMI.2013.57
|
| [8] |
Z. Kang, G. Shi, S. Huang, W. Chen, X. Pu, J. T. Zhou, et al., Multi-graph fusion for multi-view spectral clustering, Knowl.-Based Syst., 189 (2020), 105102. https://doi.org/10.1016/j.knosys.2019.105102 doi: 10.1016/j.knosys.2019.105102
|
| [9] |
G. Liu, Z. Lin, S. Yan, J. Sun, Y. Yu, Y. Ma, Robust recovery of subspace structures by low-rank representation, IEEE Trans. Pattern Anal. Mach. Intell., 35 (2012), 171–184. https://doi.org/10.1109/TPAMI.2012.88 doi: 10.1109/TPAMI.2012.88
|
| [10] |
J. Shi, J. Malik, Normalized cuts and image segmentation, IEEE Trans. Pattern Anal. Mach. Intell., 22 (2000), 888–905. https://doi.org/10.1109/34.868688 doi: 10.1109/34.868688
|
| [11] | J. Guo, Y. Sun, J. Gao, Y. Hu, B. Yin, Low rank representation on product grassmann manifolds for multi-view subspace clustering, in 2020 25th International Conference on Pattern Recognition (ICPR), (2021), 907–914. https://doi.org/10.1109/ICPR48806.2021.9412242 |
| [12] |
W. B. Hu, X. J. Wu, Multi-geometric sparse subspace clustering, Neural Process. Lett., 52 (2020), 849–867. https://doi.org/10.1007/s11063-020-10274-z doi: 10.1007/s11063-020-10274-z
|
| [13] |
D. Wei, X. Shen, Q. Sun, X. Gao, Discrete metric learning for fast image set classification, IEEE Trans. Image Process., 31 (2022), 6471–6486. https://doi.org/10.1109/TIP.2022.3212284 doi: 10.1109/TIP.2022.3212284
|
| [14] |
G. Cheng, C. Yang, X. Yao, L. Guo, J. Han, When deep learning meets metric learning: Remote sensing image scene classification via learning discriminative CNNs, IEEE Trans. Geosci. Remote Sens., 56 (2018), 2811–2821. https://doi.org/10.1109/TGRS.2017.2783902 doi: 10.1109/TGRS.2017.2783902
|
| [15] | K. Song, J. Han, G. Cheng, J. Lu, F. Nie, Adaptive neighborhood metric learning, IEEE Trans. Pattern Anal. Mach. Intell., 44 (2021), 4591–4604. |
| [16] | P. Ji, T. Zhang, H. Li, M. Salzmann, I. Reid, Deep subspace clustering networks, Adv. Neural Inf. Process. Syst., 30 (2017). |
| [17] |
H. Wang, Q. Wang, Q. Miao, X. Ma, Joint learning of data recovering and graph contrastive denoising for incomplete multi-view clustering, Inf. Fusion, 104 (2024), 102155. https://doi.org/10.1016/j.inffus.2023.102155 doi: 10.1016/j.inffus.2023.102155
|
| [18] |
W. Wu, X. Ma, Q. Wang, M. Gong, Q. Gao, Learning deep representation and discriminative features for clustering of multi-layer networks, Neural Networks, 170 (2024), 405–416. https://doi.org/10.1016/j.neunet.2023.11.053 doi: 10.1016/j.neunet.2023.11.053
|
| [19] |
J. Xu, Y. Ren, G. Li, L. Pan, C. Zhu, Z. Xu, Deep embedded multi-view clustering with collaborative training, Inf. Sci., 573 (2021). 279–290. https://doi.org/10.1016/j.ins.2020.12.073 doi: 10.1016/j.ins.2020.12.073
|
| [20] |
H. Wang, W. Zhang, X. Ma, Contrastive and adversarial regularized multi-level representation learning for incomplete multi-view clustering, Neural Networks, 172 (2024), 106102. https://doi.org/10.1016/j.neunet.2024.106102 doi: 10.1016/j.neunet.2024.106102
|
| [21] | Y. Yang, X. Ma, Graph contrastive learning for clustering of multi-layer networks, IEEE Trans. Big Data, 2023 (2023). https://doi.org/10.1109/TBDATA.2023.3343349 |
| [22] |
W. Guo, H. Che, M. F. Leung, Z. Yan, Adaptive multi-view subspace learning based on distributed optimization, Int. Things, 26 (2024), 101203. https://doi.org/10.1016/j.iot.2024.101203 doi: 10.1016/j.iot.2024.101203
|
| [23] | Z. Li, Q. Wang, Z. Tao, Q. Gao, Z. Yang, Deep adversarial multi-view clustering network, in Proceedings of the Twenty-Eighth International Joint Conference on Artificial Intelligence, 2 (2019), 4. |
| [24] |
H. Ma, W. Wu, A deep clustering framework integrating pairwise constraints and a VMF mixture model, Electron. Res. Arch., 32 (2024), 3952–3972. https://dx.doi.org/10.3934/era.2024177 doi: 10.3934/era.2024177
|
| [25] | Z. Chen, T. Xu, X. J. Wu, R. Wang, Z. Huang, J. Kittler, Riemannian local mechanism for spd neural networks, in Proceedings of the AAAI Conference on Artificial Intelligence, 37 (2023), 7104–7112. https://doi.org/10.1609/aaai.v37i6.25867 |
| [26] |
R. Wang, X. J. Wu, Z. Chen, C. Hu, J Kittler Spd manifold deep metric learning for image set classification, IEEE Trans. Neural Networks Learn. Syst., 35 (2024), 8924–8938. https://doi.org/10.1109/TNNLS.2022.3216811 doi: 10.1109/TNNLS.2022.3216811
|
| [27] | T. Liu, Z. Shi, Y. Liu, Visual clustering based on kernel sparse representation on grassmann manifolds, in 2017 IEEE 7th Annual International Conference on CYBER Technology in Automation, Control, and Intelligent Systems (CYBER), (2017), 920–925. https://doi.org/10.1109/CYBER.2017.8446507 |
| [28] |
R. Wang, X. J. Wu, Z. Liu, J. Kittler, Geometry-aware graph embedding projection metric learning for image set classification, IEEE Trans. Cognitive Dev. Syst., 14 (2022), 957–970. https://doi.org/10.1109/TCDS.2021.3086814 doi: 10.1109/TCDS.2021.3086814
|
| [29] |
R. Wang, X. J. Wu, J. Kittler, Graph embedding multi-kernel metric learning for image set classification with Grassmannian manifold-valued features, IEEE Trans. Multimedia, 23 (2021), 228–242. https://doi.org/10.1109/TMM.2020.2981189 doi: 10.1109/TMM.2020.2981189
|
| [30] |
R. Wang, X. J. Wu, T. Xu, C. Hu, J. Kittler, U-SPDNet: An SPD manifold learning-based neural network for visual classification, Neural networks, 161 (2023), 382–396. https://doi.org/10.1016/j.neunet.2022.11.030 doi: 10.1016/j.neunet.2022.11.030
|
| [31] | K. X. Chen, X. J. Wu, R. Wang, J. Kittler, Riemannian kernel based Nyström method for approximate infinite-dimensional covariance descriptors with application to image set classification, in 2018 24th International Conference on Pattern Recognition (ICPR), (2018), 651–656. https://doi.org/10.1109/ICPR.2018.8545822 |
| [32] |
T. Bendokat, R. Zimmermann, P. A. Absil, A grassmann manifold handbook: Basic geometry and computational aspects, Adv. Comput. Math., 50 (2024), 1–51. https://doi.org/10.1007/s10444-023-10090-8 doi: 10.1007/s10444-023-10090-8
|
| [33] |
D. Wei, X. Shen, Q. Sun, X. Gao, Z. Ren, Sparse representation classifier guided Grassmann reconstruction metric learning with applications to image set analysis, IEEE Trans. Multimedia, 25 (2022), 4307–4322. https://doi.org/10.1109/TMM.2022.3173535 doi: 10.1109/TMM.2022.3173535
|
| [34] | B. Wang, Y. Hu, J. Gao, Y. Sun, B. Yin, Low rank representation on Grassmann manifolds, in Computer Vision–ACCV 2014: 12th Asian Conference on Computer Vision, (2015), 81–96. https://doi.org/10.1007/978-3-319-16865-4_6 |
| [35] | X. Piao, Y. Hu, J. Gao, Y. Sun, B. Yin, Double nuclear norm based low rank representation on Grassmann manifolds for clustering, in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, (2019), 12075–12084. |
| [36] | C. Zhang, Q. Hu, H. Fu, P. Zhu, X. Cao, Latent multi-view subspace clustering, in Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, (2017), 4279–4287. |
| [37] | R. Li, C. Zhang, Q. Hu, P. Zhu, Z. Wang, Flexible multi-view representation learning for subspace clustering, in Proceedings of the Twenty-Eighth International Joint Conference on Artificial Intelligence, (2019), 2916–2922. |
| [38] | R. Zhou, Y. D. Shen, End-to-end adversarial-attention network for multi-modal clustering, in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, (2020), 14619–14628. |
| [39] |
Z. Kang, Z. Lin, X. Zhu, W. Xu, Structured graph learning for scalable subspace clustering: From single view to multiview, IEEE Trans. Cybern., 52 (2021), 8976–8986. https://doi.org/10.1109/TCYB.2021.3061660 doi: 10.1109/TCYB.2021.3061660
|
| [40] |
E. Pan, Z. Kang, High-order multi-view clustering for generic data, Inf. Fusion, 100 (2023), 101947. https://doi.org/10.1016/j.inffus.2023.101947 doi: 10.1016/j.inffus.2023.101947
|
| [41] |
J. Chen, S. Yang, X. Peng, D. Peng, Z. Wang, Augmented sparse representation for incomplete multiview clustering, IEEE Trans. Neural Networks Learn. Syst., 35 (2022), 4058–4071. https://doi.org/10.1109/TNNLS.2022.3201699 doi: 10.1109/TNNLS.2022.3201699
|
| [42] | T. Chen, S. Kornblith, M. Norouzi, G. Hinton, A simple framework for contrastive learning of visual representations, in International Conference on Machine Learning, (2020), 1597–1607. |
| [43] | Y. Tian, C. Sun, B. Poole, D. Krishnan, C. Schmid, P. Isola, What makes for good views for contrastive learning?, Adv. Neural Inf. Process. Syst., 33 (2020), 6827–6839. |
| [44] | T. Wang, P. Isola, Understanding contrastive representation learning through alignment and uniformity on the hypersphere, in International Conference on Machine Learning, (2020), 9929–9939. |
| [45] | M. Harandi, C. Sanderson, C. Shen, B. C. Lovell, Dictionary learning and sparse coding on Grassmann manifolds: An extrinsic solution, in Proceedings of the IEEE International Conference on Computer Vision (ICCV), (2013), 3120–3127. |
| [46] | Z. Huang, J. Wu, L. Van Gool, Building deep networks on Grassmann manifolds, in Proceedings of the AAAI Conference on Artificial Intelligence, (2018), 1137–1145. https://doi.org/10.1609/aaai.v32i1.11725 |
| [47] | A. Edelman, T. A. Arias, S. T. Smith, The geometry of algorithms with orthogonality constraints, SIAM J. Matrix Anal. Appl., (1998), 303–353. https://doi.org/10.1137/S0895479895290954 |
| [48] | P. A. Absil, R. Mahony, R. Sepulchre, Optimization Algorithms on Matrix Manifolds, Princeton University Press, 2009. |
| [49] | J. Hamm, D. D. Lee, Grassmann discriminant analysis: A unifying view on subspace-based learning, in Proceedings of the 25th International Conference on Machine Learning, (2008), 376–383. https://doi.org/10.1145/1390156.1390204 |
| [50] | J. Hamm, D. Lee, Extended Grassmann kernels for subspace-based learning, Adv. Neural Inf. Process. Syst., (2008), 21. |
| [51] | M. T. Harandi, C. Sanderson, S. Shirazi, B. C. Lovell, Graph embedding discriminant analysis on Grassmannian manifolds for improved image set matching, in CVPR 2011, (2011), 2705–2712. https://doi.org/10.1109/CVPR.2011.5995564 |
| [52] |
Z. Huang, S. Shan, R. Wang, H. Zhang, S. Lao, A. Kuerban, et al., A benchmark and comparative study of video-based face recognition on cox face database, IEEE Trans. Image Process., 24 (2015), 5967–5981. https://doi.org/10.1109/TIP.2015.2493448 doi: 10.1109/TIP.2015.2493448
|
| [53] | C. Cui, Y. Ren, J. Pu, X. Pu, L. He, Deep multi-view subspace clustering with anchor graph, preprint, arXiv: 2305.06939. https://doi.org/10.48550/arXiv.2305.06939 |
| [54] |
P. Xia, L. Zhang, F. Li, Learning similarity with cosine similarity ensemble, Inf. Sci., 307 (2015), 39–52. https://doi.org/10.1016/j.ins.2015.02.024 doi: 10.1016/j.ins.2015.02.024
|
| [55] | J. Chen, H. Mao, W. L. Woo, X. Peng, Deep multiview clustering by contrasting cluster assignments, in Proceedings of the IEEE/CVF International Conference on Computer Vision, (2023), 16752–16761. |
| [56] | A. Asuncion, D. Newman, UCI Machine Learning Repository, 2007. Available from: https://ergodicity.net/2013/07/ |
| [57] | J. Xu, Y. Ren, H. Tang, X. Pu, X. Zhu, M. Zeng, et al., Multi-VAE: Learning disentangled view-common and view-peculiar visual representations for multi-view clustering, in Proceedings of the IEEE/CVF International Conference on Computer Vision, (2021), 9234–9243. |
| [58] | H. Xiao, K. Rasul, R. Vollgraf, Fashion-mnist: A novel image dataset for benchmarking machine learning algorithms, preprint, arXiv: 1708.07747. https://doi.org/10.48550/arXiv.1708.07747 |
| [59] |
M. D. Addlesee, A. Jones, F. Livesey, F. Samaria, The ORL active floor [sensor system], IEEE Pers. Commun., 4 (1997), 35–41. https://doi.org/10.1109/98.626980 doi: 10.1109/98.626980
|
| [60] | F. F. Li, P. Perona, A bayesian hierarchical model for learning natural scene categories, in 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR'05), 2 (2005), 524–531. https://doi.org/10.1109/CVPR.2005.16 |
| [61] |
U. Von Luxburg, A tutorial on spectral clustering, Stat. Comput., 17 (2007), 395–416. https://doi.org/10.1007/s11222-007-9033-z doi: 10.1007/s11222-007-9033-z
|
| [62] | F. Nie, X. Wang, H. Huang, Clustering and projected clustering with adaptive neighbors, in Proceedings of the 20th ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, (2014), 977–986. https://doi.org/10.1145/2623330.2623726 |
| [63] | H. Tang, Y. Liu, Deep safe incomplete multi-view clustering: Theorem and algorithm, in International Conference on Machine Learning, (2022), 21090–21110. |
| [64] |
Y. Lin, Y. Gou, X. Liu, J. Bai, J. Lv, X. Peng, Dual contrastive prediction for incomplete multi-view representation learning, IEEE Trans. Pattern Anal. Mach. Intell., 45 (2022), 4447–4461. https://doi.org/10.1109/TPAMI.2022.3197238 doi: 10.1109/TPAMI.2022.3197238
|
| [65] | J. Xu, H. Tang, Y. Ren, L. Peng, X. Zhu, L. He, Multi-level feature learning for contrastive multi-view clustering, in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, (2022), 16051–16060. |
| [66] | L. Van der Maaten, G. Hinton, Visualizing data using t-SNE., J. Mach. Learn. Res., 9 (2008). |
| [67] |
Y. Cai, H. Che, B. Pan, M. F. Leung, C. Liu, S. Wen, Projected cross-view learning for unbalanced incomplete multi-view clustering, Inf. Fusion, 105 (2024), 102245. https://doi.org/10.1016/j.inffus.2024.102245 doi: 10.1016/j.inffus.2024.102245
|
| [68] | K. He, X. Zhang, S. Ren, J. Sun, Deep residual learning for image recognition, inn Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), (2016), 770–778. |







Figures(8) / Tables(9)
Rui Wang, Haiqiang Li, Chen Hu, Xiao-Jun Wu, Yingfang Bao. Deep Grassmannian multiview subspace clustering with contrastive learning[J]. Electronic Research Archive, 2024, 32(9): 5424-5450. doi: 10.3934/era.2024252







 DownLoad:
DownLoad: