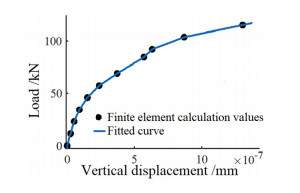
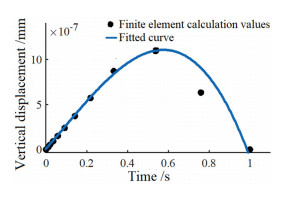
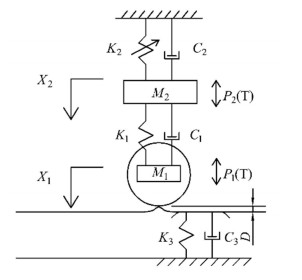
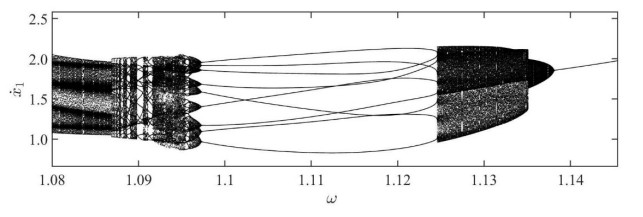
A two-degree-of-freedom vehicle wheel-rail impact vibration system model is developed, and the equivalent impact stiffness and damping of the rail are fitted applying ABAQUS, taking into account the high and low irregularity generated by the welded joints of the rail. A wheel-rail periodic interface with fixed impact was selected as the Poincaré map, and the fourth-order Runge-Kutta numerical method with variable step size was used to solve the system response. The dynamic characteristics of the system are investigated using a combination of the Bifurcation diagram, Phase plane diagram, the Poincaré map, the Time-domain diagram and the Frequency-domain diagram. It is verified that the vehicle wheel-rail impact vibration system has Hopf bifurcation, Neimark-Sacker bifurcation, Period-doubling bifurcation and Boundary crisis, and there are rich and complex nonlinear dynamic behavior changes. The research on the bifurcation and chaos characteristics of vehicle wheel-rail impact vibration systems can provide a reference for improving the stability of vehicle operation in engineering practice as well as the prediction and control of chaos in vehicle vibration reduction design.
Citation: Yang Jin, Wanxiang Li, Hongbing Zhang. Transition characteristics of the dynamic behavior of a vehicle wheel-rail vibro-impact system[J]. Electronic Research Archive, 2023, 31(11): 7040-7060. doi: 10.3934/era.2023357
A two-degree-of-freedom vehicle wheel-rail impact vibration system model is developed, and the equivalent impact stiffness and damping of the rail are fitted applying ABAQUS, taking into account the high and low irregularity generated by the welded joints of the rail. A wheel-rail periodic interface with fixed impact was selected as the Poincaré map, and the fourth-order Runge-Kutta numerical method with variable step size was used to solve the system response. The dynamic characteristics of the system are investigated using a combination of the Bifurcation diagram, Phase plane diagram, the Poincaré map, the Time-domain diagram and the Frequency-domain diagram. It is verified that the vehicle wheel-rail impact vibration system has Hopf bifurcation, Neimark-Sacker bifurcation, Period-doubling bifurcation and Boundary crisis, and there are rich and complex nonlinear dynamic behavior changes. The research on the bifurcation and chaos characteristics of vehicle wheel-rail impact vibration systems can provide a reference for improving the stability of vehicle operation in engineering practice as well as the prediction and control of chaos in vehicle vibration reduction design.

| [1] |
W. M. Zhai, G. J. Tu, J. M. Gao, Wheel-rail dynamics problem in rail welding area of subway line, J. Vibr. Meas. Diagn., 32 (2012), 701–708. https://doi.org/10.16450/j.cnki.issn.1004-6801.2012.05.021 doi: 10.16450/j.cnki.issn.1004-6801.2012.05.021

|
| [2] |
M. Dumitriu, D. I. Stănică, Study on the evaluation methods of the vertical ride comfort of railway vehicle—mean comfort method and Sperling's method, Appl. Sci., 11 (2021), 3953. https://doi.org/10.3390/app11093953 doi: 10.3390/app11093953
|
| [3] |
X. Liu, Z. He, Y. Wang, L. Yang, H. Wang, L. Cheng, The wheel flat identification based on variational modal decomposition—envelope spectrum method of the axlebox acceleration, Appl. Sci., 12 (2022), 6837. https://doi.org/10.3390/app12146837 doi: 10.3390/app12146837
|
| [4] |
S. K. Sharma, R. C. Sharma, J. Lee, H. Jang, Numerical and experimental analysis of DVA on the flexible-rigid rail vehicle carbody resonant vibration, Sensors, 22 (2022), 1922. https://doi.org/10.3390/s22051922 doi: 10.3390/s22051922
|
| [5] |
M. Dumitriu, D. I. Stănică, Effect of the anti-yaw damper on carbody vertical vibration and ride comfort of railway vehicle, Appl. Sci., 10 (2020), 8167. https://doi.org/10.3390/app10228167 doi: 10.3390/app10228167
|
| [6] |
J. Gómez-Bosch, J. Giner-Navarro, J. Carballeira, L. Baeza, A direct method for the extension of FastSim under non-Hertzian contact conditions, Veh. Syst. Dyn., 61 (2023), 2551–2569. https://doi.org/10.1080/00423114.2022.2120022 doi: 10.1080/00423114.2022.2120022
|
| [7] |
S. K. Sharma, A. Kumar, Ride performance of a high speed rail vehicle using controlled semi-active suspension system, Smart. Mater. Struct., 26 (2017), 055026. https://doi.org/10.1088/1361-665X/aa68f7 doi: 10.1088/1361-665X/aa68f7
|
| [8] |
J. D. Yau, M. D. Martínez-Rodrigo, A. Doménech, An equivalent additional damping approach to assess vehicle-bridge interaction for train-induced vibration of short-span railway bridges, Eng. Struct., 188 (2019), 469–479. https://doi.org/10.1016/j.engstruct.2019.01.144 doi: 10.1016/j.engstruct.2019.01.144
|
| [9] |
H. Tsunashima, Condition monitoring of railway tracks from car-body vibration using a machine learning technique, Appl. Sci., 9 (2019), 2734. https://doi.org/10.3390/app9132734 doi: 10.3390/app9132734
|
| [10] |
D. J. Thompson, G. Kouroussis, E. Ntotsios, Modelling, simulation and evaluation of ground vibration caused by rail vehicles, Veh. Syst. Dyn., 57 (2019), 936–983. https://doi.org/10.1080/00423114.2019.1602274 doi: 10.1080/00423114.2019.1602274
|
| [11] |
V. Kumar, V. Rastogi, P. M. Pathak, Simulation for whole-body vibration to assess ride comfort of a low–medium speed railway vehicle, Simulation, 93 (2017), 225–236. https://doi.org/10.1177/0037549716679254 doi: 10.1177/0037549716679254
|
| [12] |
R. Kulkarni, A. Qazizadeh, M. Berg, B. Dirks, I. Persson, Investigating the effect of the equivalent conicity function's nonlinearity on the dynamic behavior of a rail vehicle under typical service conditions, Veh. Syst. Dyn., 60 (2022), 3484–3503. https://doi.org/10.1080/00423114.2021.1962537 doi: 10.1080/00423114.2021.1962537
|
| [13] |
Y. W. Yu, C. C. Zhou, L. L. Zhao, Vertical dynamic model and analysis of bogie-body-seat system, J. Railway Sci. Eng., 15 (2018), 196–205. https://doi.org/10.19713/j.cnki.43-1423/u.2018.01.025 doi: 10.19713/j.cnki.43-1423/u.2018.01.025
|
| [14] |
V. E. Gozbenko, S. K. Kargapol'Tsev, B. O. Kuznetsov, A. I. Karlina, Y. I. Karlina, Determination of the principal coordinates in solving the problem of the vertical dynamics of the vehicle using the method of mathematical modeling, J. Phys.: Conf. Ser., 1333 (2019), 052007. https://doi.org/10.1088/1742-6596/1333/5/052007 doi: 10.1088/1742-6596/1333/5/052007
|
| [15] |
Z. Liu, J. L. Cheng, Y. T. Zhu, L. H. Zheng, Vertical vibration modeling and motion correlation analysis of rail vehicle (in Chinese), J. Jilin Univ. (Eng. Tech. Ed.), 50 (2020), 1600–1607. https://doi.org/10.13229/j.cnki.jdxbgxb20190559 doi: 10.13229/j.cnki.jdxbgxb20190559
|
| [16] |
L. Jing, K. Y. Wang, W. M. Zhai, Impact vibration behavior of railway vehicles: a state-of-the-art overview, Acta Mech. Sin., 37 (2021), 1193–1221. https://doi.org/10.1007/s10409-021-01140-9 doi: 10.1007/s10409-021-01140-9
|
| [17] |
C. Xiong, S. K. Liang, J. B. Wang, Influence of rubber joint stiffness of shock absorber on vertical vibration characteristics of railway vehicle (in Chinese), Mach. Build. Autom., 52 (2023), 7–10. https://doi.org/10.19344/j.cnki.issn1671-5276.2023.01.002 doi: 10.19344/j.cnki.issn1671-5276.2023.01.002
|
| [18] |
D. L. Si, C. Liang, L. W. Zhang, S. G. Wang, P. Wang, Research on shock vibration characteristics of wheel flat scar of vehicle with axle load 40t (in Chinese), J. Vibr. Eng., 35 (2022), 729–734. https://doi.org/10.16385/j.cnki.issn.1004-4523.2022.03.023 doi: 10.16385/j.cnki.issn.1004-4523.2022.03.023
|
| [19] |
J. N. Wang, L. Jing, Z. H. Huang, Considering the equivalent fatigue damage of wheel-rail material, the mechanical response of wheel-rail impact caused by wheel flat (in Chinese), J. Vibr. Shock, 41 (2022), 33–44. https://doi.org/10.13465/j.cnki.jvs.2022.02.005 doi: 10.13465/j.cnki.jvs.2022.02.005
|
| [20] |
D. C. Li, H. Song, G. Y. Meng, J. Meng, X. Chen, R. Xu, et al., Dynamic characteristics of wheel–rail collision vibration for high-speed train under crosswind, Veh. Syst. Dyn., 61 (2022), 1997–2022. https://doi.org/10.1080/00423114.2022.2093761 doi: 10.1080/00423114.2022.2093761
|
| [21] |
Z. C. Wei, Y. X. Li, I. Moroz, W. Zhang, Melnikov-type method for a class of planar hybrid piecewise-smooth systems with impulsive effect and noise excitation: Heteroclinic orbits, Chaos, 32 (2022), 103127. https://doi.org/10.1063/5.0106073 doi: 10.1063/5.0106073
|
| [22] |
Z. C. Wei, F. R. Wang, H. J. Li, W. Zhang, Jacobi stability analysis and impulsive control of a 5D self-exciting homopolar disc dynamo, Discrete Contin. Dyn. Syst. - Ser. B, 27 (2022), 5029–5045. https://doi.org/10.3934/dcdsb.2021263 doi: 10.3934/dcdsb.2021263
|
| [23] |
V. Korendiy, O. Kachur, V. Gurskyi, P. Krot, Studying the influence of the impact gap value on the average translational speed of the wheeled vibration-driven robot, Eng. Proc., 24 (2022), 25. https://doi.org/10.3390/IECMA2022-12897 doi: 10.3390/IECMA2022-12897
|
| [24] |
A. Afsharfard, Application of nonlinear magnetic vibro-impact vibration suppressor and energy harvester, Mech. Syst. Signal Process., 98 (2018), 371–381. https://doi.org/10.1016/j.ymssp.2017.05.010 doi: 10.1016/j.ymssp.2017.05.010
|
| [25] |
R. K. Mohanta, T. R. Chelliah, S. Allamsetty, A. Akula, R. Ghosh, Sources of vibration and their treatment in hydropower stations – A review, Eng. Sci. Technol. Int. J., 20 (2017), 637–648. https://doi.org/10.1016/j.jestch.2016.11.004 doi: 10.1016/j.jestch.2016.11.004
|
| [26] |
G. W. Luo, Period-doubling bifurcations and routes to chaos of the vibratory systems contacting stops, Phys. Lett. A, 323 (2004), 210–217. https://doi.org/10.1016/j.physleta.2004.01.071 doi: 10.1016/j.physleta.2004.01.071
|
| [27] |
F. W. Yin, G. W. Luo, C. H. Tong, Diversity and regularity of periodic shock vibration in vibration systems with clearance-elastic constraints (in Chinese), J. Vibr. Shock, 39 (2020), 1–10. https://doi.org/10.13465/j.cnki.jvs.2020.24.001 doi: 10.13465/j.cnki.jvs.2020.24.001
|
| [28] |
G. W. Luo, J. H. Xie, Study on periodic motion stability, bifurcation and chaotic formation process of a class of vibration systems with gaps (in Chinese), Chin. J. Solid Mech., 2003 (2003), 284–292. https://doi.org/10.19636/j.cnki.cjsm42-1250/o3.2003.03.005 doi: 10.19636/j.cnki.cjsm42-1250/o3.2003.03.005
|
| [29] |
X. H. Lv, G. W. Luo, Diversity and transition characteristics of periodic vibrations of vibration systems with Gaps (in Chinese), J. Vibr. Eng., 33 (2020), 688–697. https://doi.org/10.16385/j.cnki.issn.1004-4523.2020.04.006 doi: 10.16385/j.cnki.issn.1004-4523.2020.04.006
|
| [30] | S. Ma, L. Gao, X. B. Liu, J. Tu, J. L. Sun, Y. W. Wei, Measurement and analysis of unevenness of welded joints of ballastless track for passenger-freight common line (in Chinese), Railway Eng., 59 (2019), 152–156. |
| [31] |
J. M. Gao, W. M. Zhai, Dynamic effect and safety limits of rail weld irregularity on high-speed railways, Sci. Sin. Technol., 44 (2014), 697–706. https://doi.org/10.1360/N092014-00081 doi: 10.1360/N092014-00081
|
| [32] | TB/T3276−2011, Rail for high-speed railway, 2011. |
| [33] | G. Q. Cui, Research on reasonable stiffness of double block ballastless track (in Chinese), Railway Eng., (2009), 93–96. |
| [34] | S. J. Li, X. X. Ma, Application of the vibration measurement system in dynamic parameter measurement (in Chinese), Res. Explor. Lab., 38 (2019), 58–61. |
| [35] | W. T. Xu, Y. H. Zhang, G. W. Tang, G. J. Pan, Variable damping characteristics of Magnesium alloys and its Dynamic Analysis Method, Appl. Math. Mech., 41 (2020), 1297–1310. |
| [36] | D. Chen, Stiffness Analysis of Railway Vehicle Air Spring, Master's thesis, Southwest Jiaotong University, 2011. |
| [37] |
W. J. Yin, Y. Han, S. P. Yang, Dynamic analysis of air spring suspension system under forced vibration (in Chinese), China J. Highway Transp., 19 (2006), 117–121. https://doi.org/10.19721/j.cnki.1001-7372.2006.03.022 doi: 10.19721/j.cnki.1001-7372.2006.03.022
|
| [38] |
Q. Y. Zhou, The Hundred-year development history of rail type and measuring length in China (in Chinese), China Railway, 2022 (2022), 42–46. https://doi.org/10.19549/j.issn.1001-683x.2021.08.18.001 doi: 10.19549/j.issn.1001-683x.2021.08.18.001
|
| [39] |
J. Zeng, J. Y. Zhang, Z. Y. Shen, Hopf bifurcation and nonlinear oscillations in railway vehicle systems, Veh. Syst. Dyn., 33 (1999), 552–565. https://doi.org/10.1080/00423114.1999.12063111 doi: 10.1080/00423114.1999.12063111
|
| [40] |
J. Zeng, W. H. Zhang, H. Y. Dai, X. J. Wu, Z. Y. Shen, Hunting instability analysis and H∞ controlled stabilizer design for high-speed railway passenger car, Veh. Syst. Dyn., 29 (1998), 655–668. https://doi.org/10.1080/00423119808969593 doi: 10.1080/00423119808969593
|
| [41] | G. W. Luo, J. H. Xie, Periodic Motion and Bifurcation of Collisional Vibration System, Science Press, 2004. |

Figures(25) / Tables(2)
Yang Jin, Wanxiang Li, Hongbing Zhang. Transition characteristics of the dynamic behavior of a vehicle wheel-rail vibro-impact system[J]. Electronic Research Archive, 2023, 31(11): 7040-7060. doi: 10.3934/era.2023357







 DownLoad:
DownLoad: