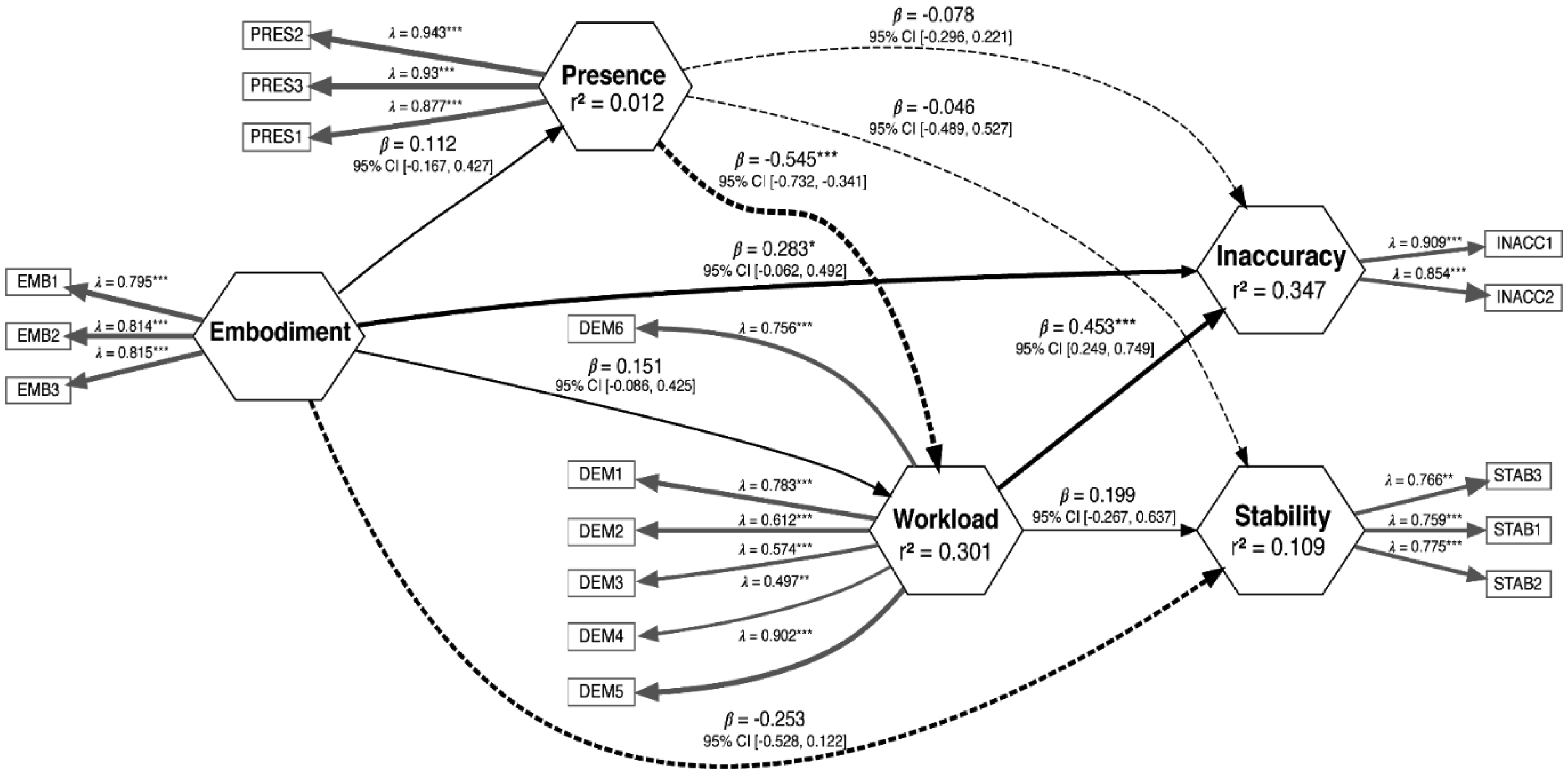
Embodiment (the sensation that arises when the properties of an external instrument are processed as if they are the attributes of one's own biological body) and (tele)presence (the sensation of being fully engaged and immersed in a location other than the physical space occupied by one's body) sustain the perception of the physical self and potentially improve performance in teleoperations (a system that enables human intelligence to control robots and requires implementing an effective human-machine interface). Embodiment and presence may be interdependent and influenced by right temporo-parietal junction (rTPJ) activity. We investigated the interplay between embodiment, (tele)presence, and performance in teleoperation, focusing on the role of the rTPJ. Participants underwent a virtual reality task with transcranial direct current stimulation (tDCS) twice, receiving either active or sham stimulation. Behavioral measures (driving inaccuracy, elapsed time in the lap, time spent in attentional lapses, short-term self-similarity, and long-term self-similarity), perceived workload (mental demand, physical demand, temporal demand, own performance, effort, and frustration), embodiment's components (ownership, agency, tactile sensations, location, and external appearance), and presence's components (realism, possibility to act, quality of interface, possibility to examine, self-evaluation of performance, haptic, and sounds) were assessed. The results showed that rTPJ stimulation decreased perceived ownership but enhanced presence with changes in the complexity of visuomotor adjustments (long and short-term self-similarity indices). Structural equation modeling revealed that embodiment increased visuomotor inaccuracy (a composite variable of overall performance, including deviations from the optimal trajectory and the time taken to complete the task), presence reduced workload, and workload increased inaccuracy. These results suggested a dissociation between embodiment and presence, with embodiment hindering performance. Prioritizing virtual integration may lower human performance, while reduced workload from presence could aid engagement. These findings emphasize the intricate interplay between rTPJ, subjective experiences, and performance in teleoperation.
Citation: Valentina Cesari, Graziella Orrù, Andrea Piarulli, Alessandra Vallefuoco, Franca Melfi, Angelo Gemignani, Danilo Menicucci. The effects of right temporoparietal junction stimulation on embodiment, presence, and performance in teleoperation[J]. AIMS Neuroscience, 2024, 11(3): 352-373. doi: 10.3934/Neuroscience.2024022
Embodiment (the sensation that arises when the properties of an external instrument are processed as if they are the attributes of one's own biological body) and (tele)presence (the sensation of being fully engaged and immersed in a location other than the physical space occupied by one's body) sustain the perception of the physical self and potentially improve performance in teleoperations (a system that enables human intelligence to control robots and requires implementing an effective human-machine interface). Embodiment and presence may be interdependent and influenced by right temporo-parietal junction (rTPJ) activity. We investigated the interplay between embodiment, (tele)presence, and performance in teleoperation, focusing on the role of the rTPJ. Participants underwent a virtual reality task with transcranial direct current stimulation (tDCS) twice, receiving either active or sham stimulation. Behavioral measures (driving inaccuracy, elapsed time in the lap, time spent in attentional lapses, short-term self-similarity, and long-term self-similarity), perceived workload (mental demand, physical demand, temporal demand, own performance, effort, and frustration), embodiment's components (ownership, agency, tactile sensations, location, and external appearance), and presence's components (realism, possibility to act, quality of interface, possibility to examine, self-evaluation of performance, haptic, and sounds) were assessed. The results showed that rTPJ stimulation decreased perceived ownership but enhanced presence with changes in the complexity of visuomotor adjustments (long and short-term self-similarity indices). Structural equation modeling revealed that embodiment increased visuomotor inaccuracy (a composite variable of overall performance, including deviations from the optimal trajectory and the time taken to complete the task), presence reduced workload, and workload increased inaccuracy. These results suggested a dissociation between embodiment and presence, with embodiment hindering performance. Prioritizing virtual integration may lower human performance, while reduced workload from presence could aid engagement. These findings emphasize the intricate interplay between rTPJ, subjective experiences, and performance in teleoperation.
Analysis of Variance
Average Variance Extracted
Confirmatory Factor Analysis
Demand
Embodiment
Exploratory Factor Analysis
Inaccuracy
multi-group analysis
Presence
Partial Least Squares Structural Equation Modeling
right temporoparietal junction
Stability
transcranial direct current stimulation
Virtual Reality

| [1] | Cui J, Tosunoglu S, Roberts R, et al. (2003) A review of teleoperation system control. In: Proceedings of the Florida conference on recent advances in robotics; Boca Raton, FL . Boca Raton: Florida Atlantic University p. 1-12. |
| [2] |
Pala M, Lorencik D, Sincak P (2012) Towards the robotic teleoperation systems in education. In: 2012 IEEE 10th International Conference on Emerging eLearning Technologies and Applications (ICETA); Stará Lesná, Slovakia . New York: IEEE p. 241-246. https://doi.org/10.1109/ICETA.2012.6418328 
|
| [3] |
Siciliano B, Khatib O (2016) Springer Handbook of Robotics. Cham: Springer International Publishing. https://doi.org/10.1007/978-3-319-32552-1
|
| [4] |
Schinstock DE (1998) Approximate solutions to unreachable commands in teleoperation of a robot. Robot Comput Integr Manuf 3: 219-227. https://doi.org/10.1016/S0736-5845(97)00033-1
|
| [5] |
Álvarez B, Iborra A, Alonso A, et al. (2001) Reference architecture for robot teleoperation: development details and practical use. Control Eng Pract 9: 395-402. https://doi.org/10.1016/S0967-0661(00)00121-0
|
| [6] |
Toet A, Kuling IA, Krom BN, et al. (2020) Toward Enhanced Teleoperation Through Embodiment. Front Robot AI 7: 14. https://doi.org/10.3389/frobt.2020.00014
|
| [7] |
Kilteni K, Groten R, Slater M (2012) The Sense of Embodiment in Virtual Reality. Presence Teleoperators Virtual Environ 21: 373-387. https://doi.org/10.1162/PRES_a_00124
|
| [8] |
Slater M (2009) Place illusion and plausibility can lead to realistic behaviour in immersive virtual environments. Philos Trans R Soc Lond B Biol Sci 364: 3549-3557. https://doi.org/10.1098/rstb.2009.0138
|
| [9] |
Slater M, Spanlang B, Corominas D (2010) Simulating virtual environments within virtual environments as the basis for a psychophysics of presence. ACM Trans Graph 29: 1-9. https://doi.org/10.1145/1778765.1778829
|
| [10] | Lombard M, Biocca F, Freeman J, et al. (2015) Immersed in Media: Telepresence Theory, Measurement & Technology. Cham: Springer International Publishing. https://doi.org/10.1007/978-3-319-10190-3 |
| [11] | Herbelin B, Salomon R, Serino A, et al. (2016) 5. Neural Mechanisms of Bodily Self-Consciousness and the Experience of Presence in Virtual Reality. Human Computer Confluence: Transforming Human Experience Through Symbiotic Technologies . Warsaw, Poland: De Gruyter Open Poland pp. 80-96. https://doi.org/10.1515/9783110471137-005 |
| [12] |
Blanke O, Mohr C, Michel CM, et al. (2005) Linking out-of-body experience and self processing to mental own-body imagery at the temporoparietal junction. J Neurosci Off J Soc Neurosci 25: 550-557. https://doi.org/10.1523/JNEUROSCI.2612-04.2005
|
| [13] |
Orrù G, Bertelloni D, Cesari V, et al. (2021) Targeting temporal parietal junction for assessing and treating disembodiment phenomena: a systematic review of TMS effect on depersonalization and derealization disorders (DPD) and body illusions. AIMS Neurosci 8: 181-194. https://doi.org/10.3934/Neuroscience.2021009
|
| [14] |
Arzy S, Thut G, Mohr C, et al. (2006) Neural basis of embodiment: distinct contributions of temporoparietal junction and extrastriate body area. J Neurosci Off J Soc Neurosci 26: 8074-8081. https://doi.org/10.1523/JNEUROSCI.0745-06.2006
|
| [15] |
Ptak R, Schnider A (2011) The attention network of the human brain: Relating structural damage associated with spatial neglect to functional imaging correlates of spatial attention. Neuropsychologia 49: 3063-3070. https://doi.org/10.1016/j.neuropsychologia.2011.07.008
|
| [16] |
Donaldson PH, Rinehart NJ, Enticott PG (2015) Noninvasive stimulation of the temporoparietal junction: A systematic review. Neurosci Biobehav Rev 55: 547-572. https://doi.org/10.1016/j.neubiorev.2015.05.017
|
| [17] |
Pascual-Leone A, Amedi A, Fregni F, et al. (2005) The plastic human brain cortex. Annu Rev Neurosci 28: 377-401. https://doi.org/10.1146/annurev.neuro.27.070203.144216
|
| [18] |
Polanía R, Nitsche MA, Ruff CC (2018) Studying and modifying brain function with non-invasive brain stimulation. Nat Neurosci 21: 174-187. https://doi.org/10.1038/s41593-017-0054-4
|
| [19] |
Santarnecchi E, Brem A-K, Levenbaum E, et al. (2015) Enhancing cognition using transcranial electrical stimulation. Curr Opin Behav Sci 4: 171-178. https://doi.org/10.1016/j.cobeha.2015.06.003
|
| [20] |
Škola F, Liarokapis F (2021) Study of Full-body Virtual Embodiment Using noninvasive Brain Stimulation and Imaging. Int J Hum-Comput Interact 37: 1-14. https://doi.org/10.1080/10447318.2020.1870827
|
| [21] |
Convento S, Romano D, Maravita A, et al. (2018) Roles of the right temporo-parietal and premotor cortices in self-location and body ownership. Eur J Neurosci 47: 1289-1302. https://doi.org/10.1111/ejn.13937
|
| [22] |
Lapenta OM, Fregni F, Oberman LM, et al. (2012) Bilateral temporal cortex transcranial direct current stimulation worsens male performance in a multisensory integration task. Neurosci Lett 527: 105-109. https://doi.org/10.1016/j.neulet.2012.08.076
|
| [23] |
Marques LM, Lapenta OM, Merabet LB, et al. (2014) Tuning and disrupting the brain—modulating the McGurk illusion with electrical stimulation. Front Hum Neurosci 8: 533. https://doi.org/10.3389/fnhum.2014.00533
|
| [24] |
Lira M, Pantaleão FN, de Souza Ramos CG, et al. (2018) Anodal transcranial direct current stimulation over the posterior parietal cortex reduces the onset time to the rubber hand illusion and increases the body ownership. Exp Brain Res 236: 2935-2943. https://doi.org/10.1007/s00221-018-5353-9
|
| [25] | Abedanzadeh R, Alboghebish S, Barati P (2021) The effect of transcranial direct current stimulation of dorsolateral prefrontal cortex on performing a sequential dual task: a randomized experimental study. Psicol Reflexao E Crit Rev Semest Dep Psicol UFRGS 34: 30. https://doi.org/10.1186/s41155-021-00195-8 |
| [26] |
Fregni F, Liguori P, Fecteau S, et al. (2008) Cortical stimulation of the prefrontal cortex with transcranial direct current stimulation reduces cue-provoked smoking craving: a randomized, sham-controlled study. J Clin Psychiatry 69: 32-40. https://doi.org/10.4088/JCP.v69n0105
|
| [27] |
Mondino M, Luck D, Grot S, et al. (2018) Effects of repeated transcranial direct current stimulation on smoking, craving and brain reactivity to smoking cues. Sci Rep 8: 8724. https://doi.org/10.1038/s41598-018-27057-1
|
| [28] |
Stagg CJ, Jayaram G, Pastor D, et al. (2011) Polarity and timing-dependent effects of transcranial direct current stimulation in explicit motor learning. Neuropsychologia 49: 800-804. https://doi.org/10.1016/j.neuropsychologia.2011.02.009
|
| [29] |
Nitsche MA, Paulus W (2000) Excitability changes induced in the human motor cortex by weak transcranial direct current stimulation. J Physiol 527 Pt 3: 633-639. https://doi.org/10.1111/j.1469-7793.2000.t01-1-00633.x
|
| [30] |
Khalil R, Karim AA, Godde B (2023) Less might be more: 1 mA but not 1.5 mA of tDCS improves tactile orientation discrimination. IBRO Neurosci Rep 15: 186-192. https://doi.org/10.1016/j.ibneur.2023.08.003
|
| [31] |
Santiesteban I, Banissy MJ, Catmur C, et al. (2012) Enhancing Social Ability by Stimulating Right Temporoparietal Junction. Curr Biol 22: 2274-2277. https://doi.org/10.1016/j.cub.2012.10.018
|
| [32] |
Santiesteban I, White S, Cook J, et al. (2012) Training social cognition: From imitation to Theory of Mind. Cognition 122: 228-235. https://doi.org/10.1016/j.cognition.2011.11.004
|
| [33] | Bufano P, Albertini N, Chiarelli S, et al. (2022) Weakened Sustained Attention and Increased Cognitive Effort after Total Sleep Deprivation: A Virtual Reality Ecological Study. Int J Human–Computer Interact : 1-10. https://doi.org/10.1080/10447318.2022.2099047 |
| [34] | Cesari V, Marinari E, Laurino M, et al. (2021) Attention-Dependent Physiological Correlates in Sleep-Deprived Young Healthy Humans. Behav Sci Basel Switz 11: 22. https://doi.org/10.3390/bs11020022 |
| [35] |
Laurino M, Menicucci D, Mastorci F, et al. (2012) Mind-body relationships in elite apnea divers during breath holding: a study of autonomic responses to acute hypoxemia. Front Neuroengineering 5. https://doi.org/10.3389/fneng.2012.00004
|
| [36] |
Peng CK, Havlin S, Stanley HE, et al. (1995) Quantification of scaling exponents and crossover phenomena in nonstationary heartbeat time series. Chaos Woodbury N 5: 82-87. https://doi.org/10.1063/1.166141
|
| [37] |
Maczák B, Gingl Z, Vadai G (2024) General spectral characteristics of human activity and its inherent scale-free fluctuations. Sci Rep 14: 2604. https://doi.org/10.1038/s41598-024-52905-8
|
| [38] |
Gonzalez-Franco M, Peck TC (2018) Avatar Embodiment. Towards a Standardized Questionnaire. Front Robot AI 5. https://doi.org/10.3389/frobt.2018.00074
|
| [39] |
Klotz AC, Swider BW, Kwon SH (2023) Back-translation practices in organizational research: Avoiding loss in translation. J Appl Psychol 108: 699-727. https://doi.org/10.1037/apl0001050
|
| [40] | Cyberpsychology Lab of UQO, ‘Welcome to the Cyberpsychology Lab of UQO!’, consulted on 9 May 2024. [Online]. Available from: http://w3.uqo.ca/cyberpsy/index.php/welcome |
| [41] |
Witmer BG, Singer MJ (1998) Measuring presence in virtual environments: A presence questionnaire. Presence Teleoperators Virtual Environ 7: 225-240. https://doi.org/10.1162/105474698565686
|
| [42] |
Hart SG, Staveland LE (1988) Development of NASA-TLX (Task Load Index): Results of empirical and theoretical research. Human mental workload . Oxford, England: North-Holland 139-183. https://doi.org/10.1016/S0166-4115(08)62386-9
|
| [43] |
Mueller ST, Piper BJ (2014) The Psychology Experiment Building Language (PEBL) and PEBL Test Battery. J Neurosci Methods 222: 250-259. https://doi.org/10.1016/j.jneumeth.2013.10.024
|
| [44] |
Poreisz C, Boros K, Antal A, et al. (2007) Safety aspects of transcranial direct current stimulation concerning healthy subjects and patients. Brain Res Bull 72: 208-214. https://doi.org/10.1016/j.brainresbull.2007.01.004
|
| [45] | Harrington D (2009) Confirmatory Factor Analysis. USA: Oxford University Press. https://doi.org/10.1093/acprof:oso/9780195339888.001.0001 |
| [46] | Brown TA Confirmatory Factor Analysis for Applied Research, Second Edition, Guilford Publications (2015). |
| [47] |
Gould SJ (2015) Second Order Confirmatory Factor Analysis: An Example. Proceedings of the 1987 Academy of Marketing Science (AMS) Annual Conference . Cham: Springer International Publishing 488-490. https://doi.org/10.1007/978-3-319-17052-7_100
|
| [48] | Jöreskog KG, Wold HOA Systems Under Indirect Observation: Causality, Structure, Prediction, North-Holland (1982). |
| [49] |
Hair JF, Hult GTM, Ringle CM, et al. (2021) The SEMinR Package. Partial Least Squares Structural Equation Modeling (PLS-SEM) Using R: A Workbook . Cham: Springer International Publishing 49-74. https://doi.org/10.1007/978-3-030-80519-7_3
|
| [50] |
Dijkstra TK, Henseler J (2015) Consistent Partial Least Squares Path Modeling. MIS Q 39: 297-316. https://doi.org/10.25300/MISQ/2015/39.2.02
|
| [51] |
Söllner M, Mishra AN, Becker J-M, et al. (2024) Use IT again? Dynamic roles of habit, intention and their interaction on continued system use by individuals in utilitarian, volitional contexts. Eur J Inf Syst 33: 80-96. https://doi.org/10.1080/0960085X.2022.2115949
|
| [52] |
Breves P, Schramm H (2019) Good for the feelings, bad for the memory: the impact of 3D versus 2D movies on persuasion knowledge and brand placement effectiveness. Int J Advert 38: 1264-1285. https://doi.org/10.1080/02650487.2019.1622326
|
| [53] | Buonocore S, Massa F, Di Gironimo G (2023) Does the Embodiment Influence the Success of Visuo-haptic Learning?. Application of Emerging Technologies. AHFE (2023) International Conference. AHFE Open Access, vol 115 . USA: AHFE International. https://doi.org/10.54941/ahfe1004350 |
| [54] |
Roettl J, Terlutter R (2018) The same video game in 2D, 3D or virtual reality – How does technology impact game evaluation and brand placements?. PLOS ONE 13: e0200724. https://doi.org/10.1371/journal.pone.0200724
|
| [55] | Minsky M (1980) Telepresence. OMNI Magazine : 44-52. |
| [56] | Rheingold H Virtual Reality: Exploring the Brave New Technologies, Simon & Schuster Adult Publishing Group (1991). |
| [57] |
Koch C, Massimini M, Boly M, et al. (2016) Neural correlates of consciousness: progress and problems. Nat Rev Neurosci 17: 307-321. https://doi.org/10.1038/nrn.2016.22
|
| [58] |
Tononi G, Boly M, Gosseries O, et al. The Neurology of Consciousness (2016) 407-461. https://doi.org/10.1016/B978-0-12-800948-2.00025-X
|
| [59] |
Dai R, Larkin TE, Huang Z, et al. (2023) Classical and non-classical psychedelic drugs induce common network changes in human cortex. NeuroImage 273: 120097. https://doi.org/10.1016/j.neuroimage.2023.120097
|
| [60] |
Tsakiris M, Costantini M, Haggard P (2008) The role of the right temporo-parietal junction in maintaining a coherent sense of one's body. Neuropsychologia 46: 3014-3018. https://doi.org/10.1016/j.neuropsychologia.2008.06.004
|
| [61] |
Papeo L, Longo MR, Feurra M, et al. (2010) The role of the right temporoparietal junction in intersensory conflict: detection or resolution?. Exp Brain Res 206: 129-139. https://doi.org/10.1007/s00221-010-2198-2
|
| [62] |
Kammers MPM, Longo MR, Tsakiris M, et al. (2009) Specificity and Coherence of Body Representations. Perception 38: 1804-1820. https://doi.org/10.1068/p6389
|
| [63] |
Jakobs O, Wang LE, Dafotakis M, et al. (2009) Effects of timing and movement uncertainty implicate the temporo-parietal junction in the prediction of forthcoming motor actions. NeuroImage 47: 667-677. https://doi.org/10.1016/j.neuroimage.2009.04.065
|
| [64] |
Wu Q, Chang C-F, Xi S, et al. (2015) A critical role of temporoparietal junction in the integration of top-down and bottom-up attentional control. Hum Brain Mapp 36: 4317-4333. https://doi.org/10.1002/hbm.22919
|
| [65] |
Nitsche MA, Nitsche MS, Klein CC, et al. (2003) Level of action of cathodal DC polarisation induced inhibition of the human motor cortex. Clin Neurophysiol Off J Int Fed Clin Neurophysiol 114: 600-604. https://doi.org/10.1016/S1388-2457(02)00412-1
|
| [66] |
Berg H (2019) How does evidence-based practice in psychology work? – As an ethical demarcation. Philos Psychol 32: 853-873. https://doi.org/10.1080/09515089.2019.1632424
|
| [67] |
Grechuta K, Guga J, Maffei G, et al. (2017) Visuotactile integration modulates motor performance in a perceptual decision-making task. Sci Rep 7: 3333. https://doi.org/10.1038/s41598-017-03488-0
|
| [68] |
Kokkinara E, Slater M, Lopez-Moliner J (2015) The Effects of Visuomotor Calibration to the Perceived Space and Body, through Embodiment in Immersive Virtual Reality. ACM Trans Appl Percept 13. https://doi.org/10.1145/2818998
|
| [69] |
Tsakiris M, Haggard P (2005) The Rubber Hand Illusion Revisited: Visuotactile Integration and Self-Attribution. J Exp Psychol Hum Percept Perform 31: 80-91. https://doi.org/10.1037/0096-1523.31.1.80
|
| [70] |
Botvinick M, Cohen J (1998) Rubber hands ‘feel’ touch that eyes see. Nature 391: 756-756. https://doi.org/10.1038/35784
|
| [71] |
Cesari V, D'Aversa S, Piarulli A, et al. (2024) Sense of Agency and Skills Learning in Virtual-Mediated Environment: A Systematic Review. Brain Sci 14: 350. https://doi.org/10.3390/brainsci14040350
|
| [72] |
Levac DE, Huber ME, Sternad D (2019) Learning and transfer of complex motor skills in virtual reality: a perspective review. J NeuroEngineering Rehabil 16: 121. https://doi.org/10.1186/s12984-019-0587-8
|
| [73] |
El Rassi I, El Rassi J-M (2020) A review of haptic feedback in tele-operated robotic surgery. J Med Eng Technol 44: 247-254. https://doi.org/10.1080/03091902.2020.1772391
|
| [74] |
Ma R, Kaber DB (2006) Presence, workload and performance effects of synthetic environment design factors. Int J Hum-Comput Stud 64: 541-552. https://doi.org/10.1016/j.ijhcs.2005.12.003
|
| [75] |
Kaber DB, Riley JM (1999) Adaptive automation of a dynamic control task based on secondary task workload measurement. Int J Cogn Ergon 3: 169-187. https://doi.org/10.1207/s15327566ijce0303_1
|
| [76] |
Lackey SJ, Salcedo JN, Szalma JL, et al. (2016) The stress and workload of virtual reality training: the effects of presence, immersion and flow. Ergonomics 59: 1060-1072. https://doi.org/10.1080/00140139.2015.1122234
|

Figures(6) / Tables(1)

Valentina Cesari, Graziella Orrù, Andrea Piarulli, Alessandra Vallefuoco, Franca Melfi, Angelo Gemignani, Danilo Menicucci. The effects of right temporoparietal junction stimulation on embodiment, presence, and performance in teleoperation[J]. AIMS Neuroscience, 2024, 11(3): 352-373. doi: 10.3934/Neuroscience.2024022







 DownLoad:
DownLoad: