Citation: Dmitriy V. Likhachev, Natalia Malkova, Leonid Poslavsky. Quantitative characterization and modeling of sub-bandgap absorption features in thin oxide films from spectroscopic ellipsometry data[J]. AIMS Materials Science, 2015, 2(4): 356-368. doi: 10.3934/matersci.2015.4.356

| [1] |
Takeuchi H, Ha D, King T-J (2004) Observation of bulk HfO2 defects by spectroscopic ellipsometry. J Vac Sci Technol A 22: 1337-1341. doi: 10.1116/1.1705593

|
| [2] |
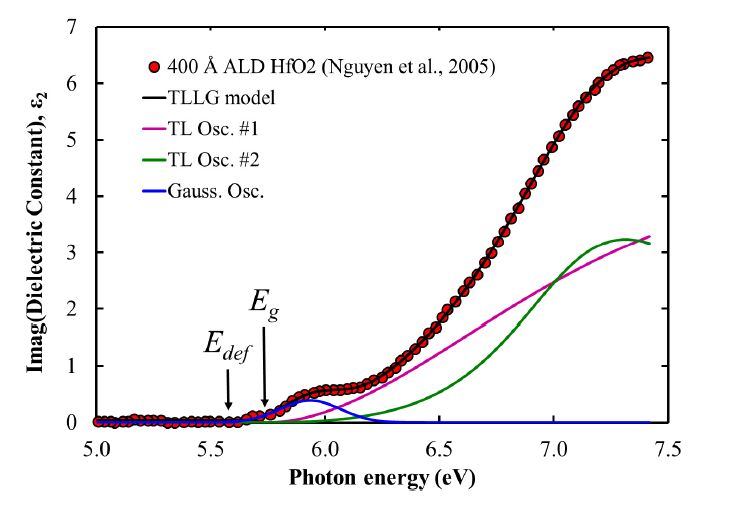
Nguyen NV, Davydov AV, Chandler-Horowitz D, et al. (2005) Sub-bandgap defect states in polycrystalline hafnium oxide and their suppression by admixture of silicon. Appl Phys Lett 87: 192903. doi: 10.1063/1.2126136
|
| [3] |
Price J, Lysaght PS, Song SC, et al. (2007) Identification of sub-band-gap absorption features at the HfO2/Si(100) interface via spectroscopic ellipsometry. Appl Phys Lett 91: 061925. doi: 10.1063/1.2769389
|
| [4] |
Ferrieu F, Dabertrand K, Lhostis S, et al. (2007) Observation of HfO2 thin films by deep UV spectroscopic ellipsometry. J Non-Cryst Solids 353: 658-662. doi: 10.1016/j.jnoncrysol.2006.10.032
|
| [5] |
Price J, Lysaght PS, Song SC, et al. (2008) Observation of interfacial electrostatic field-induced changes in the silicon dielectric function using spectroscopic ellipsometry. Phys. Status Solidi A 205: 918-921. doi: 10.1002/pssa.200777836
|
| [6] |
Price J, Bersuker G, Lysaght PS (2009) Identification of interfacial defects in high-κ gate stack films by spectroscopic ellipsometry. J Vac Sci Technol B 27: 310-312. doi: 10.1116/1.3021045
|
| [7] |
Price J, Bersuker G, Lysaght PS (2012) Identification of electrically active defects in thin dielectric films by spectroscopic ellipsometry. J Appl Phys 111: 043507. doi: 10.1063/1.3684605
|
| [8] |
Vasić R, Consiglio S, Clark RD, et al. (2013) Multi-technique x-ray and optical characterization of crystalline phase, texture, and electronic structure of atomic layer deposited Hf1-xZrxO2 gate dielectrics deposited by a cyclical deposition and annealing scheme. J Appl Phys 113: 234101. doi: 10.1063/1.4811446
|
| [9] | Fan X, Liu H, Zhang X (2014) Identification of optimal ALD process conditions of Nd2O3 on Si by spectroscopic ellipsometry. Appl Phys A 114: 545-550. |
| [10] |
Fan X, Liu H, Zhang X, et al. (2015) Optical characteristics of H2O-based and O3-based HfO2 films deposited by ALD using spectroscopy ellipsometry. Appl Phys A 119: 957-963. doi: 10.1007/s00339-015-9048-9
|
| [11] | Collins RW, Ferlauto AS (2005) Optical physics of materials, In: Tompkins HG, Irene EA (Eds.), Handbook of Ellipsometry, Norwich: William Andrew Publishing/ Noyes, 93-235. |
| [12] | Jellison GE Jr. (2005) Data analysis for spectroscopic ellipsometry, In: Tompkins HG, Irene EA (Eds.), Handbook of Ellipsometry, Norwich: William Andrew Publishing/ Noyes, 237-296. |
| [13] |
Petrik P (2014) Parameterization of the dielectric function of semiconductor nanocrystals. Physica B 453: 2-7. doi: 10.1016/j.physb.2014.03.065
|
| [14] |
Cho YJ, Nguyen NV, Richter CA, et al. (2002) Spectroscopic ellipsometry characterization of high-κ dielectric HfO2 thin films and the high-temperature annealing effects on their optical properties. Appl Phys Lett 80: 1249-1251. doi: 10.1063/1.1448384
|
| [15] |
Sancho-Parramon J, Modreanu M, Bosch S, et al. (2008) Optical characterization of HfO2 by spectroscopic ellipsometry: Dispersion models and direct data inversion. Thin Solid Films 516: 7990-7995. doi: 10.1016/j.tsf.2008.04.007
|
| [16] |
Jellison, Jr GE, Modine FA (1996) Parameterization of the optical functions of amorphous materials in the interband region. Appl Phys Lett 69: 371-373; Erratum: ‘‘Parameterization of the optical functions of amorphous materials in the interband region'' [Appl. Phys. Lett. 69, 371 (1996)], idid. 69: 2137. doi: 10.1063/1.118064
|
| [17] |
Ferlauto AS, Ferreira GM, Pearce JM, et al. (2002) Analytical model for the optical functions of amorphous semiconductors from the near-infrared to ultraviolet: Applications in thin film photovoltaics. J Appl Phys 92: 2424-2436. doi: 10.1063/1.1497462
|
| [18] |
Ferlauto AS, Ferreira GM, Pearce JM, et al. (2004) Analytical model for the optical functions of amorphous semiconductors and its applications for thin film solar cells. Thin Solid Films 455-456: 388-392. doi: 10.1016/j.tsf.2003.11.234
|
| [19] | Foldyna M, Postava K, Bouchala J, et al. (2004) Model dielectric functional of amorphous materials including Urbach tail, In: Pistora J, Postava K, Hrabovsky M, et al. (Eds.), Microwave and Optical Technology 2003, Ostrava, Czech Republic, August 11-15, 2003, SPIE Proc. 5445: 301-305. |
| [20] |
Falahatgar SS, Ghodsi FE (2013) A developed model for the determination of the dielectric function for some absorbing thin films using pseudo-Urbach tail. Physica B 412: 4-11. doi: 10.1016/j.physb.2012.12.011
|
| [21] |
Price J, Hung PY, Rhoad T, et al. (2004) Spectroscopic ellipsometry characterization of HfxSiyOz films using the Cody-Lorentz parameterized model. Appl Phys Lett 85: 1701-1703. doi: 10.1063/1.1784889
|
| [22] |
Kamineni VK, Hilfiker JN, Freeouf JL, et al. (2011) Extension of far UV spectroscopic ellipsometry studies of high-κ dielectric films to 130 nm. Thin Solid Films 519: 2894-2898. doi: 10.1016/j.tsf.2010.12.080
|
| [23] |
Mei JJ, Chen H, Shen WZ, et al. (2006) Optical properties and local bonding configurations of hydrogenated amorphous silicon nitride thin films. J Appl Phys 100: 073516. doi: 10.1063/1.2356915
|
| [24] |
Eiamchai P, Chindaudom P, Pokaipisit A, et al. (2009) A spectroscopic ellipsometry study of TiO2 thin films prepared by ion-assisted electron-beam evaporation. Curr Appl Phys 9: 707-712. doi: 10.1016/j.cap.2008.06.011
|
| [25] |
Avci N, Smet PF, Poelman H, et al. (2009) Characterization of TiO2 powders and thin films prepared by non-aqueous sol-gel techniques. J Sol-Gel Sci Technol 52: 424-431. doi: 10.1007/s10971-009-2028-9
|
| [26] |
Peiponen K-E, Vartiainen EM (1991) Kramers-Kronig relations in optical data inversion. Phys Rev B 44: 8301-8303. doi: 10.1103/PhysRevB.44.8301
|
| [27] |
De Sousa Meneses D, Malki M, Echegut P (2006) Structure and lattice dynamics of binary lead silicate glasses investigated by infrared spectroscopy. J Non-Cryst Solids 352: 769-776. doi: 10.1016/j.jnoncrysol.2006.02.004
|
| [28] | Jellison, Jr. GE, Modine FA (1983) Optical functions of silicon between 1.7 and 4.7 eV at elevated temperatures. Phys Rev B 27: 7466-7472. |
| [29] |
Lautenschlager P, Garriga M, Viña L, et al. (1987) Temperature dependence of the dielectric function and interband critical points in silicon. Phys Rev B 36: 4821-4830. doi: 10.1103/PhysRevB.36.4821
|
| [30] |
Vineis CJ (2005) Complex dielectric function of biaxial tensile strained silicon by spectroscopic ellipsometry. Phys Rev B 71: 245205. doi: 10.1103/PhysRevB.71.245205
|
| [31] |
Awazu K, Kawazoe H, Saito Y, et al. (1991) Structural imperfections in silicon dioxide films identified with vacuum ultraviolet optical absorption measurements. Appl Phys Lett 59: 528-530. doi: 10.1063/1.105428
|
| [32] |
Awazu K, Kawazoe H, Muta K-i (1991) Optical properties of oxygen-deficient centers in silica glasses fabricated in H2 or vacuum ambient. J Appl Phys 70: 69-74. doi: 10.1063/1.350245
|
| [33] |
Terada N, Haga T, Miyata N, et al. (1992) Optical absorption in ultrathin silicon oxide films near the SiO2/Si interface. Phys Rev B 46: 2312-2318. doi: 10.1103/PhysRevB.46.2312
|
| [34] |
Aarik J, Mändar H, Kirm M, et al. (2004) Optical characterization of HfO2 thin films grown by atomic layer deposition. Thin Solid Films 466: 41-47. doi: 10.1016/j.tsf.2004.01.110
|
| [35] |
Lucovsky G, Zhang Y, Luning J, et al. (2005) Intrinsic band edge traps in nano-crystalline HfO2 gate dielectrics. Microelectron Eng 80: 110-113. doi: 10.1016/j.mee.2005.04.052
|
| [36] |
Hoppe EE, Sorbello RS, Aita CR (2007) Near-edge optical absorption behavior of sputter deposited hafnium dioxide. J Appl Phys 101: 123534. doi: 10.1063/1.2750406
|
| [37] |
Ferrieu F, Dabertrand K, Lhostis S, et al. (2007) Observation of HfO2 thin films by deep UV spectroscopic ellipsometry. J Non-Cryst Solids 353: 658-662. doi: 10.1016/j.jnoncrysol.2006.10.032
|
| [38] |
Martínez FL, Toledano-Luque M, Gandía JJ, et al. (2007) Optical properties and structure of HfO2 thin films grown by high pressure reactive sputtering. J Phys D: Appl Phys 40: 5256-5265. doi: 10.1088/0022-3727/40/17/037
|
| [39] |
Hill DH, Bartynski RA, Nguyen NV, et al. (2008) The relationship between local order, long range order, and sub-band-gap defects in hafnium oxide and hafnium silicate films. J Appl Phys 103: 093712. doi: 10.1063/1.2909442
|
| [40] |
Park J-W, Lee D-K, Lim D, et al. (2008) Optical properties of thermally annealed hafnium oxide and their correlation with structural change. J Appl Phys 104: 033521. doi: 10.1063/1.2961326
|
| [41] |
Bersch E, Di M, Consiglio S, et al. (2010) Complete band offset characterization of the HfO2/SiO2/Si stack using charge corrected x-ray photoelectron spectroscopy. J Appl Phys 107: 043702. doi: 10.1063/1.3284961
|
| [42] |
Xu K, Sio H, Kirillov OA, et al. (2013) Band offset determination of atomic-layer-deposited Al2O3 and HfO2 on InP by internal photoemission and spectroscopic ellipsometry. J Appl Phys 113: 024504. doi: 10.1063/1.4774038
|
| [43] | Di M, Bersch E, Diebold AC, et al. (2011) Comparison of methods to determine bandgaps of ultrathin HfO2 films using spectroscopic ellipsometry. J Vac Sci Technol A 29: 041001. |
| [44] |
Franta D, Ohlídal I, Nečas D, et al. (2011) Optical characterization of HfO2 thin films. Thin Solid Films 519: 6085-6091. doi: 10.1016/j.tsf.2011.03.128
|
| [45] | Nguyen NV, Han J-P, Kim JY, et al. (2003) Optical properties of jet-vapor-deposited TiAlO and HfAlO determined by vacuum utraviolet spectroscopic ellipsometry, In: Seiler DG, Diebold AC, Shaffner TJ, et al. (Eds.), Characterization and Metrology for ULSI Technology 2003, Austin, TX, U.S.A., March 24-28, 2003, AIP Conf. Proc. 683: 181-185. |
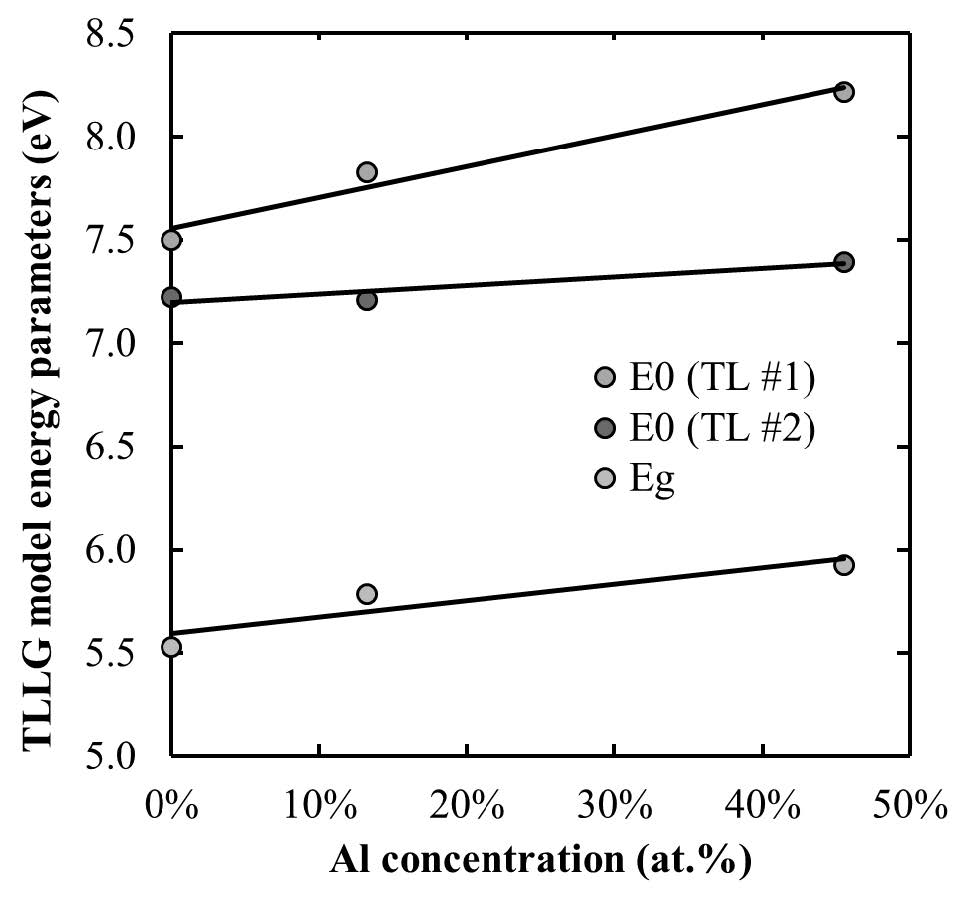
| [46] | Nguyen NV, Sayan S, Levin I, et al. (2005) Optical band gaps and composition dependence of hafnium-aluminate thin films grown by atomic layer chemical vapor deposition. J Vac Sci Technol A 23: 1706-1713. |
| [47] |
Wang XF, Li Q, Egerton RF, et al. (2007) Effect of Al addition on the microstructure and electronic structure of HfO2 film. J Appl Phys 101: 013514. doi: 10.1063/1.2405741
|
| [48] |
Park TJ, Kim JH, Jang JH, et al. (2010) Reduction of electrical defects in atomic layer deposited HfO2 films by Al doping. Chem Mater 22: 4175-4184. doi: 10.1021/cm100620x
|
| [49] | Sandberg RL, Allred DD, Lunt S, et al. (2004) Optical properties and application of uranium-based thin films for the extreme ultraviolet and soft x-ray region, In: Soufli R, Seely JF (Eds.), Optical Constants of Materials for UV to X-Ray Wavelengths, Denver, CO, U.S.A., August 2, 2004, SPIE Proc. 5538: 107-118. |
| [50] |
Meek TT, von Roedern B (2008) Semiconductor devices fabricated from actinide oxides. Vacuum 83: 226-228. doi: 10.1016/j.vacuum.2008.04.005
|
| [51] | Kruschwitz CA, Mukhopadhyay S, Schwellenbach D, et al. (2014) Semiconductor neutron detectors using depleted uranium oxide, In: Burger A, Franks L, James RB, et al. (Eds.), Hard X-Ray, Gamma-Ray, and Neutron Detector Physics XVI, San Diego, CA, U.S.A., August 17, 2014, SPIE Proc. 9213: 92130C-1-92130C-9. |
| [52] |
Chen Q, Lai X, Bai B, et al. (2010) Structural characterization and optical properties of UO2 thin films by magnetron sputtering. Appl Surf Sci 256: 3047-3050. doi: 10.1016/j.apsusc.2009.11.071
|
| [53] |
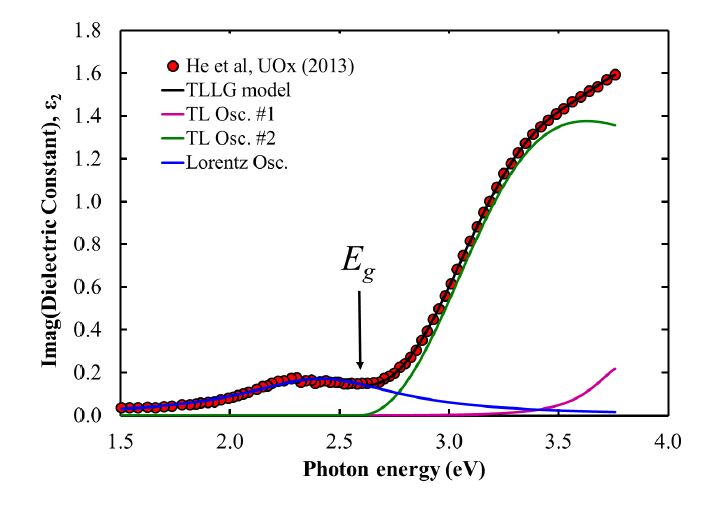
He H, Andersson DA, Allred DD, et al. (2013) Determination of the insulation gap of uranium oxides by spectroscopic ellipsometry and density functional theory. J Phys Chem C 117: 16540-16551. doi: 10.1021/jp401149m
|
| [54] | Khilla MA, Rofail NH (1986) Optical absorption edge of uranium trioxide phases: Part I. Radiochim Acta 40: 155-158. |
Figures(4) / Tables(4)

Dmitriy V. Likhachev, Natalia Malkova, Leonid Poslavsky. Quantitative characterization and modeling of sub-bandgap absorption features in thin oxide films from spectroscopic ellipsometry data[J]. AIMS Materials Science, 2015, 2(4): 356-368. doi: 10.3934/matersci.2015.4.356







 DownLoad:
DownLoad: