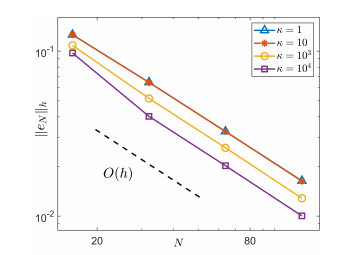
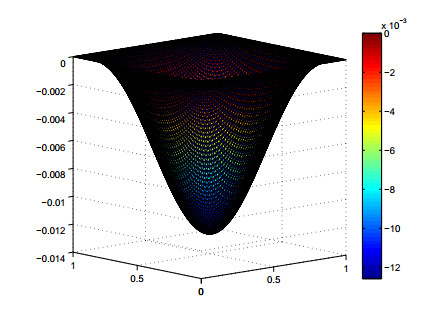
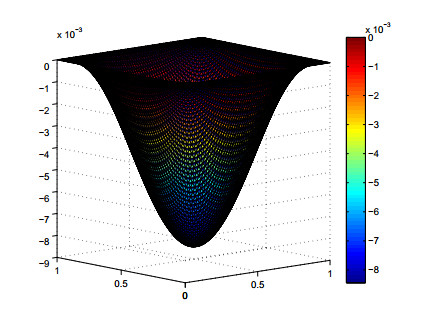
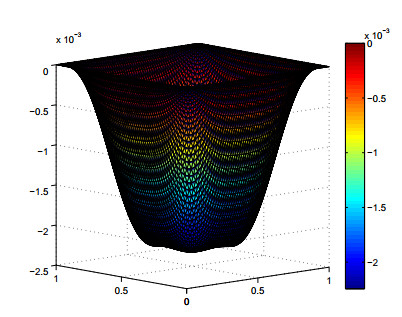
A nonconforming finite element method (FEM) is proposed and analyzed for the clamped thin elastic Kirchhoff plate unilaterally constrained by an elastic obstacle. The discrete scheme is constructed by using the strongly discontinuous Bergan's energy-orthogonal plate element, which has simple degrees of freedom and about 25 percent fewer global dimension than that of the famous triangular Morley element. A novel error analysis is presented to overcome the difficulties caused by the strong discontinuity and derive the optimal estimate. Numerical experiments are carried out to verify the theoretical analysis.
Citation: Lifang Pei, Man Zhang, Meng Li. A novel error analysis of nonconforming finite element for the clamped Kirchhoff plate with elastic unilateral obstacle[J]. Networks and Heterogeneous Media, 2023, 18(3): 1178-1189. doi: 10.3934/nhm.2023050
A nonconforming finite element method (FEM) is proposed and analyzed for the clamped thin elastic Kirchhoff plate unilaterally constrained by an elastic obstacle. The discrete scheme is constructed by using the strongly discontinuous Bergan's energy-orthogonal plate element, which has simple degrees of freedom and about 25 percent fewer global dimension than that of the famous triangular Morley element. A novel error analysis is presented to overcome the difficulties caused by the strong discontinuity and derive the optimal estimate. Numerical experiments are carried out to verify the theoretical analysis.

| [1] |
C. Tosone, A. Maceri, The clamped plate with elastic unilateral obstacles: a finite element approach, Math. Models Meth. Appl. Sci., 13 (2003), 1231–1243. https://doi.org/10.1142/S021820250300288X doi: 10.1142/S021820250300288X

|
| [2] | W. M. Han, D. Y. Hua, L. H. Wang, Nonconforming finite element methods for a clamped plate with elastic unilateral obstacle, J. Integral Equ. Appl., 18 (2006), 267–284. |
| [3] | R. Glowinski, Numerical methods for nonlinear variational inequality problems, New Yrok: Springer-Verlag, 1984. |
| [4] |
D. Y. Shi, S. C. Chen, Quasi conforming element approximation for a fourth order variational inequality with displacement obstacle, Acta Math. Sci., 23 (2003), 61–66. https://doi.org/10.1016/S0252-9602(17)30146-7 doi: 10.1016/S0252-9602(17)30146-7
|
| [5] |
D. Y. Shi, S. C. Chen, General estimates on nonconforming elements for a fourth order variational problem, Numer. Math. Sinica, 25 (2003), 99–106. https://doi.org/10.1007/s00211-004-0537-6 doi: 10.1007/s00211-004-0537-6
|
| [6] |
S. C. Brenner, L. Y. Sung, Y. Zhang, Finite element methods for the displacement obstacle problem of clamped plates, Math. Comput., 81 (2012), 1247–1262. https://doi.org/10.1090/S0025-5718-2012-02602-0 doi: 10.1090/S0025-5718-2012-02602-0
|
| [7] |
F. Fang, W. M. Han, J. G. Huang, The virtual element method for an obstacle problem of a Kirchhoff-Love plate, Commun. Nonlinear Sci. Numer. Simul., 103 (2021), 106008. https://doi.org/10.1016/j.cnsns.2021.106008 doi: 10.1016/j.cnsns.2021.106008
|
| [8] | S. C. Brenner, L. Y. Sung, K. N. Wang, Additive Schwarz preconditioners for $C^0$ interior penalty methods for the obstacle problem of clamped Kirchhoff plates, Numer. Meth. Part Differ. Equ., 38 (2022), 102–117. |
| [9] |
S. C. Brenner, L. Y. Sung, H. C. Zhang, Y. Zhang, A Morley finite element method for the displacement obstacle problem of clamped Kirchhoff plates, J. Comput. Appl. Math., 254 (2013), 31–42. https://doi.org/10.1016/j.cam.2013.02.028 doi: 10.1016/j.cam.2013.02.028
|
| [10] |
S. C. Brenner, L. Y. Sung, H. C. Zhang, Y. Zhang, A quadratic $C^0$ interior penalty method for the displacement obstacle problem of clamped Kirchhoff plates, SIAM J. Numer. Anal., 50 (2012), 3329–3350. https://doi.org/10.1137/110845926 doi: 10.1137/110845926
|
| [11] |
D. Y. Shi, L. F. Pei, Double set parameter finite element method for two-sided displacement obstacle problem of clamped plate, J. Math. Anal. Appl., 436 (2016), 203–216. https://doi.org/10.1016/j.jmaa.2015.11.004 doi: 10.1016/j.jmaa.2015.11.004
|
| [12] |
D. Y. Shi, L. F. Pei, A new error analysis of Bergan's energy-orthogonal element for two-sided displacement obstacle problem of clamped plate, J. Math. Anal. Appl., 442 (2016), 339–352. https://doi.org/10.1016/j.jmaa.2016.04.058 doi: 10.1016/j.jmaa.2016.04.058
|
| [13] | W. B. Liu, W. Gong, N. N. Yan, A new finite element approximation of a state-constrained optimal control problem, J. Comput. Math., 27 (2009), 97–114. |
| [14] |
W. Gong, N. N. Yan, Mixed finite element scheme for optimal control problems with pointwise state constraints, J. Sci. Comput., 46 (2011), 182–203. https://doi.org/10.1007/s10915-010-9392-z doi: 10.1007/s10915-010-9392-z
|
| [15] |
J. L. Qiu, J. K. Zhao, F. Wang, Nonconforming virtual element methods for the fourth-order variational inequalities of the first kind, J. Comput. Appl. Math., 425 (2023), 115025. https://doi.org/10.1016/j.cam.2022.115025 doi: 10.1016/j.cam.2022.115025
|
| [16] | J. T. Cui, Y. Zhang, A new analysis of discontinuous Galerkin methods for a fourth order variational inequality, Comput. Meth. Appl. Mech. Eng., 1 (2019), 531–547. |
| [17] |
F. Wang, J. K. Zhao, Conforming and nonconforming virtual element methods for a Kirchhoff plate contact problem, IMA J Numer. Anal., 41 (2021), 1496–1521. https://doi.org/10.1093/imanum/draa005 doi: 10.1093/imanum/draa005
|
| [18] |
T. Gustafsson, R. Stenberg, J. Videman, A stabilized finite element method for the plate obstacle problem, BIT Numer. Math., 59 (2018), 97–124. https://doi.org/10.1016/0045-7825(87)90001-6 doi: 10.1016/0045-7825(87)90001-6
|
| [19] |
C. A. Felippa, P. G. Bergan, A triangular bending element based on energy-orthogonal free formulation, Comput. Meth. Appl. Mech. Eng., 61 (1987), 129–160. https://doi.org/10.1016/0045-7825(87)90001-6 doi: 10.1016/0045-7825(87)90001-6
|
| [20] |
Z. C. Shi, S. C. Chen, F. Zhang, Convergence analysis of Bergan's energy-orthogonal plate element, Math. Models Meth. Appl. Sci., 4 (1994), 489–507. https://doi.org/10.1142/S0218202594000285 doi: 10.1142/S0218202594000285
|
| [21] |
Z. C. Shi, Convergence of the TRUNC plate element, Comput. Meth. Appl. Mech. Eng., 62 (1987), 71–88. https://doi.org/10.1016/0045-7825(87)90090-9 doi: 10.1016/0045-7825(87)90090-9
|
Figures(4) / Tables(1)
Lifang Pei, Man Zhang, Meng Li. A novel error analysis of nonconforming finite element for the clamped Kirchhoff plate with elastic unilateral obstacle[J]. Networks and Heterogeneous Media, 2023, 18(3): 1178-1189. doi: 10.3934/nhm.2023050







 DownLoad:
DownLoad: