In this paper, we derive the mean-field limit of a collective dynamics model with time-varying weights, for weight dynamics that preserve the total mass of the system as well as indistinguishability of the agents. The limit equation is a transport equation with source, where the (non-local) transport term corresponds to the position dynamics, and the (non-local) source term comes from the weight redistribution among the agents. We show existence and uniqueness of the solution for both microscopic and macroscopic models and introduce a new empirical measure taking into account the weights. We obtain the convergence of the microscopic model to the macroscopic one by showing continuity of the macroscopic solution with respect to the initial data, in the Wasserstein and Bounded Lipschitz topologies.
Citation: Nastassia Pouradier Duteil. Mean-field limit of collective dynamics with time-varying weights[J]. Networks and Heterogeneous Media, 2022, 17(2): 129-161. doi: 10.3934/nhm.2022001
In this paper, we derive the mean-field limit of a collective dynamics model with time-varying weights, for weight dynamics that preserve the total mass of the system as well as indistinguishability of the agents. The limit equation is a transport equation with source, where the (non-local) transport term corresponds to the position dynamics, and the (non-local) source term comes from the weight redistribution among the agents. We show existence and uniqueness of the solution for both microscopic and macroscopic models and introduce a new empirical measure taking into account the weights. We obtain the convergence of the microscopic model to the macroscopic one by showing continuity of the macroscopic solution with respect to the initial data, in the Wasserstein and Bounded Lipschitz topologies.

| [1] |
A simulation study on the schooling mechanism in fish. Nippon Suisan Gakkaishi (1982) 48: 1081-1088. 
|
| [2] |
Mean-field and graph limits for collective dynamics models with time-varying weights. Journal of Differential Equations (2021) 299: 65-110.
|
| [3] |
W. Braun and K. Hepp, The Vlasov dynamics and its fluctuations in the $1/N$ limit of interacting classical particles, Communications in Mathematical Physics, 56 (1977), 101–113, URL https://projecteuclid.org:443/euclid.cmp/1103901139. |
| [4] |
F. Bullo, J. Cortés and S. Martínez, Distributed Control of Robotic Networks: A Mathematical Approach to Motion Coordination Algorithms, Princeton Series in Applied Mathematics. Princeton University Press, Princeton. |
| [5] |
A Eulerian approach to the analysis of rendez-vous algorithms. IFAC Proceedings Volumes (2008) 41: 9039-9044.
|
| [6] |
Emergent behavior in flocks. IEEE Transactions on Automatic Control (2007) 52: 852-862.
|
| [7] |
P. Degond, Macroscopic limits of the Boltzmann equation: A review, Birkhäuser Boston, Boston, MA, 2004, 3–57. |
| [8] |
Large scale dynamics of the persistent turning walker model of fish behavior. Journal of Statistical Physics (2008) 131: 989-1021.
|
| [9] |
Reaching a consensus. Journal of American Statistical Association (1974) 69: 118-121.
|
| [10] |
Vlasov equations. Functional Analysis and Its Applications (1979) 13: 115-123.
|
| [11] |
R. M. Dudley, Real Analysis and Probability, 2nd edition, Cambridge Studies in Advanced Mathematics, Cambridge University Press, 2002. |
| [12] |
A formal theory of social power. Psychological Review (1956) 63: 181-194.
|
| [13] |
Collective behavior in animal groups: Theoretical models and empirical studies. Human Frontier Science Program Journal (2008) 2: 205-219.
|
| [14] |
From particle to kinetic and hydrodynamic descriptions of flocking. Kinetic and Related Models (2008) 1: 415-435.
|
| [15] |
R. Hegselmann, U. Krause et al., Opinion dynamics and bounded confidence models, analysis, and simulation, Journal of Artificial Societies and Social Simulation, 5. |
| [16] |
Social dynamics models with time-varying influence. Mathematical Models and Methods in Applied Sciences (2019) 29: 681-716.
|
| [17] |
B. Piccoli and N. Pouradier Duteil, Control of collective dynamics with time-varying weights, in Recent Advances in Kinetic Equations and Applications (ed. F. Salvarani), Springer International Publishing, Cham, 2021,289–308. |
| [18] |
Generalized Wasserstein distance and its application to transport equations with source. Archive for Rational Mechanics and Analysis (2014) 211: 335-358.
|
| [19] |
On properties of the generalized wasserstein distance. Archive for Rational Mechanics and Analysis (2016) 222: 1339-1365.
|
| [20] |
B. Piccoli and F. Rossi, Measure-theoretic models for crowd dynamics, Springer International Publishing, Cham, 2018,137–165. |
| [21] |
B. Piccoli, F. Rossi and M. Tournus, A Wasserstein norm for signed measures, with application to nonlocal transport equation with source term, HAL, (2019), URL https://hal.archives-ouvertes.fr/hal-01665244, arXiv: 1910.05105. |
| [22] |
Novel type of phase transition in a system of self-driven particles. Physical Review Letters (1995) 75: 1226-1229.
|
| [23] |
C. Villani, Optimal Transport: Old and New, Grundlehren der mathematischen Wissenschaften, Springer Berlin Heidelberg, 2008. |


Figures(3)
Nastassia Pouradier Duteil. Mean-field limit of collective dynamics with time-varying weights[J]. Networks and Heterogeneous Media, 2022, 17(2): 129-161. doi: 10.3934/nhm.2022001

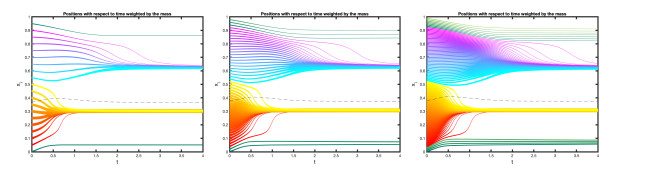
Evolution of the positions for
Evolution of the weights for
Comparison of






 DownLoad:
DownLoad: