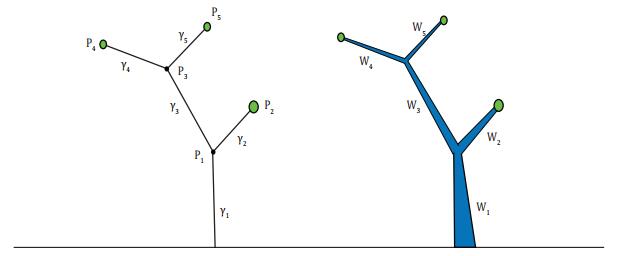
A model of irrigation network, where lower branches must be thicker in order to support the weight of the higher ones, was recently introduced in [
Citation: Qing Sun. Irrigable measures for weighted irrigation plans[J]. Networks and Heterogeneous Media, 2021, 16(3): 493-511. doi: 10.3934/nhm.2021014
A model of irrigation network, where lower branches must be thicker in order to support the weight of the higher ones, was recently introduced in [

| [1] |
M. Bernot, V. Caselles and J. -M. Morel, Optimal Transportation Networks. Models and Theory, Lecture Notes in Mathematics, 1955, Springer, Berlin, 2009. |
| [2] |
Traffic plans. Publicacions Matemàtiques (2005) 49: 417-451. 
|
| [3] |
Fractal regularity results on optimal irrigation patterns. J. Math. Pures Appl. (2014) 102: 854-890.
|
| [4] |
A. Bressan, M. Palladino and Q. Sun, Variational problems for tree roots and branches, Calc. Var. & Part. Diff. Equat., 59 (2020), Paper No. 7, 31 pp. |
| [5] | On differential systems with vector-valued impulsive controls. Boll. Un. Matematica Italiana B (1988) 2: 641-656. |
| [6] |
On the optimal shape of tree roots and branches. Math. Models & Methods Appl. Sci. (2018) 28: 2763-2801.
|
| [7] |
A. Bressan and Q. Sun, Weighted irrigation plans, submitted, arXiv: 1906.02232. |
| [8] | On the dimension of an irrigable measure. Rend. Sem. Mat. Univ. Padova. (2007) 117: 1-49. |
| [9] |
Elementary properties of optimal irrigation patterns. Calc. Var. & Part. Diff. Equat. (2007) 28: 317-349.
|
| [10] |
Some remarks on the fractal structure of irrigation balls. Advanced Nonlinear Studies (2019) 19: 55-68.
|
| [11] | (2015) Measure Theory and Fine Properties of Functions. Revised Edition. CRC Press. |
| [12] |
Minimum cost communication networks. Bell System Tech. J. (1967) 46: 2209-2227.
|
| [13] |
P. Hartman, Ordinary Differential Equations, , Second Edition, Birkhäuser, Boston, Mass., 1982. |
| [14] |
Synchronic and asynchronic descriptions of irrigation problems. Adv. Nonlinear Stud. (2013) 13: 583-623.
|
| [15] |
A variational model of irrigation patterns. Interfaces Free Bound. (2003) 5: 391-415.
|
| [16] |
Optimal paths related to transport problems. Comm. Contemp. Math. (2003) 5: 251-279.
|
| [17] |
Motivations, ideas and applications of ramified optimal transportation. ESAIM Math. Model. Numer. Anal. (2015) 49: 1791-1832.
|



Figures(4)
Qing Sun. Irrigable measures for weighted irrigation plans[J]. Networks and Heterogeneous Media, 2021, 16(3): 493-511. doi: 10.3934/nhm.2021014

Left: A free standing tree with 5 branches. In this example,
Left: Two finite truncation plans, showing three maximal
Left: The dyadic approxmiated measure
The dyadic irrigation plans in






 DownLoad:
DownLoad: