Citation: Jahfar T K, Chithra A V. Central vertex join and central edge join of two graphs[J]. AIMS Mathematics, 2020, 5(6): 7214-7233. doi: 10.3934/math.2020461

| [1] | C. Adiga, B. R. Rakshith, K. N. Subba Krishna, Spectra of some new graph operations and some new class of integral graphs, Iranian Journal of Mathematical Sciences and Informatics, 13 (2018), 51-65. |
| [2] | D. Cvetkovic, M. Doob, H. Sachs, et al., Spectra of graphs:theory and applications, vol. 10, Academic Press, New York, 1980. |
| [3] | D. Cvetkovic, S. Simic, P. Rowlinson, An introduction to the theory of graph spectra, Cambridge University Press, 2009. |
| [4] |
A. Das and P. Panigrahi, Spectra of R-vertex join and R-edge join of two graphs, Discussiones Mathematicae-General Algebra and Applications, 38 (2018), 19-32. doi: 10.7151/dmgaa.1279

|
| [5] |
J. Lan and B. Zhou, Spectra of graph operations based on R-graph, Linear and Multilinear Algebra, 63 (2015), 1401-1422. doi: 10.1080/03081087.2014.941292
|
| [6] |
X. Liu and P. Lu, Spectra of subdivision-vertex and subdivision-edge neighbourhood coronae, Linear Algebra Appl., 438 (2013), 3547-3559. doi: 10.1016/j.laa.2012.12.033
|
| [7] |
X. Liu and Z. Zhang, Spectra of subdivision-vertex and subdivision-edge joins of graphs, Bullettin of the Malaysian Mathematical Sciences Society, 42 (2019), 15-31. doi: 10.1007/s40840-017-0466-z
|
| [8] |
C. McLeman and E. McNicholas, Spectra of coronae, Linear Algebra Appl., 435 (2011), 998-1007. doi: 10.1016/j.laa.2011.02.007
|
| [9] | J. V. Vivin, M. M. Akbar Ali, K. Thilagavathi, On harmonious coloring of central graphs, Advances and applications in discrete mathematics, 2 (2008), 17-33. |
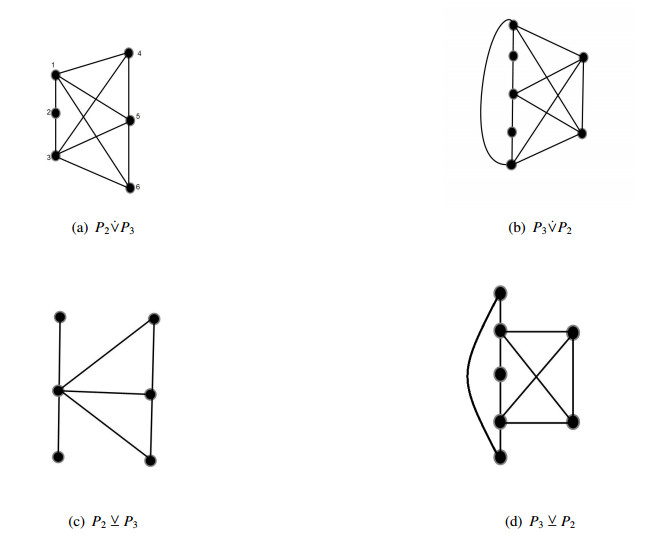
Figures(1)

Jahfar T K, Chithra A V. Central vertex join and central edge join of two graphs[J]. AIMS Mathematics, 2020, 5(6): 7214-7233. doi: 10.3934/math.2020461







 DownLoad:
DownLoad: