This paper presents the influence of cuts inspired by kirigami art on the outer surface of a soft actuator with cylindrical geometry. Both the kirigami pattern and orientation were varied to achieve expanding, bending, and twisting motions. Two symmetric kirigami patterns are presented, i.e., cells and stripes, in a horizontal, vertical, and tilted configurations, respectively. We also present the tensile response of the kirigami sheets by using the finite element method (FEM). Then, we show that the soft actuator expands, bends or twists when kirigami patterns are wrapped around it. All actuators were analyzed by performing FEM simulations to evaluate the effects of kirigami patterns on the actuator performance. Among the obtained variants of the expanding and bending actuators, the striped pattern provided the best performance for both motions. We show how the number of cuts and the relationship between the gaps affect the expanding performance. For the twisting motion, we obtained two variants; we present the influence of the change of the inclination angle for both patterns, i.e., cells and stripes. The actuators that presented the best performance for each motion were built; a manufacturing process using the casting technique is described. The validation of the hardware by computer vision is presented.
Citation: X. Yamile Sandoval-Castro, Eduardo Castillo-Castaneda, Benigno Munoz-Barron, Maximiano F. Ruiz-Torres. Mechanical programmable design of soft pneumatic actuators with kirigami patterns to generate expanding, bending and twisting motions[J]. STEM Education, 2023, 3(1): 15-27. doi: 10.3934/steme.2023002
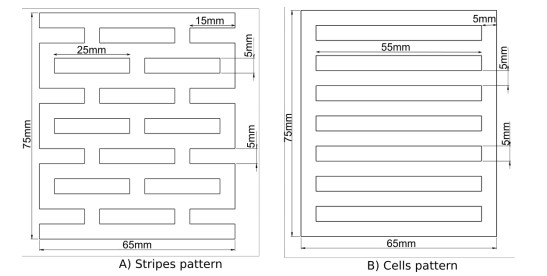
This paper presents the influence of cuts inspired by kirigami art on the outer surface of a soft actuator with cylindrical geometry. Both the kirigami pattern and orientation were varied to achieve expanding, bending, and twisting motions. Two symmetric kirigami patterns are presented, i.e., cells and stripes, in a horizontal, vertical, and tilted configurations, respectively. We also present the tensile response of the kirigami sheets by using the finite element method (FEM). Then, we show that the soft actuator expands, bends or twists when kirigami patterns are wrapped around it. All actuators were analyzed by performing FEM simulations to evaluate the effects of kirigami patterns on the actuator performance. Among the obtained variants of the expanding and bending actuators, the striped pattern provided the best performance for both motions. We show how the number of cuts and the relationship between the gaps affect the expanding performance. For the twisting motion, we obtained two variants; we present the influence of the change of the inclination angle for both patterns, i.e., cells and stripes. The actuators that presented the best performance for each motion were built; a manufacturing process using the casting technique is described. The validation of the hardware by computer vision is presented.

| [1] |
Connolly, F., Walsh, C.J. and Bertoldi, K., Automatic design of fiber-reinforced soft actuators for trajectory matching. Proceedings of the National Academy of Sciences, 2016,114(1): 51–56. https://doi.org/10.1073/pnas.1615140114 doi: 10.1073/pnas.1615140114

|
| [2] |
Gollob, S., Park, C., Koo, B.H.B. and Roche, E., A Modular Geometrical Framework for Modelling the Force-Contraction Profile of Vacuum-Powered Soft Actuators. Frontiers in Robotics and AI, 2021, 8: 606938. https://doi.org/10.3389/frobt.2021.606938 doi: 10.3389/frobt.2021.606938
|
| [3] |
She, Y., Chen, J., Shi, H. and Su, H., Modeling and Validation of a Novel Bending Actuator for Soft Robotics Applications. Soft Robotics, 2016, 3(2): 71–81. https://doi.org/10.1089/soro.2015.0022 doi: 10.1089/soro.2015.0022
|
| [4] |
Li, Y., Chen, Y., Ren, T., Li, Y. and Choi, S., Precharged Pneumatic Soft Actuators and Their Applications to Untethered Soft Robots. Soft Robotics, 2018, 5(5): 567–575. https://doi.org/10.1089/soro.2017.0090 doi: 10.1089/soro.2017.0090
|
| [5] | Wang, T. and Ge, L., Guoying Gu. Programmable design of soft pneu-net actuators with oblique chambers can generate coupled bending and twisting motions. Actuators A: Physical, 2021,271: 131–138. https://doi.org/10.1016/j.sna.2018.01.018 |
| [6] |
Ainla, A., Verma, M.S., Yang, D. and Whitesides, G.M., Soft, Rotating Pneumatic Actuator. Soft Robotics, 2017, 4(3): 297–304. https://doi.org/10.1089/soro.2017.0090 doi: 10.1089/soro.2017.0090
|
| [7] |
Yan, J., Zhang, X., Xu, B. and Zhao, J.A., New Spiral-Type Inflatable Pure Torsional Soft Actuator. Soft Robotics, 2018, 5(5): 527–540. https://doi.org/10.1089/soro.2017.0040 doi: 10.1089/soro.2017.0040
|
| [8] | Zhang, Q. and Zhang, Z., A novel double layer, multi-channel soft pneumatic actuator that can achieve multiple motions, in 23rd International Conference on Mechatronics and Machine Vision In Practice (M2VIP). Nanjing, China, 2016, 1–6. https://doi.org/10.1109/M2VIP.2016.7827343 |
| [9] |
Chen, W., Xiong, C., Liu, C., Li, P. and Chen, Y., Fabrication and Dynamic Modeling of Bidirectional Bending Soft Actuator Integrated with Optical Waveguide Curvature Sensor. Soft Robotics, 2019, 6(4): 495–506. https://doi.org/10.1089/soro.2018.0061 doi: 10.1089/soro.2018.0061
|
| [10] | Sandoval-Castro, X.Y., Garcia-morales, D.S., Raatz, A. and Castillo-Castaneda, E., Robust 3D Printed Modular Soft Pneumatic Actuator using Origami Concept for High Contraction Soft Systems, in 5th IEEE/IFToMM International Conference on Reconfigurable Mechanisms and Robots (ReMAR 2021). Canada, 2021,598–607. https://doi.org/10.32920/19469876.v1 |
| [11] |
Zaghloul, A. and Bone, G.M., Origami-Inspired Soft Pneumatic Actuators: Generalization and Design Optimization. Actuators, 2023, 12(2): 72. https://doi.org/10.3390/act12020072 doi: 10.3390/act12020072
|
| [12] |
Shao, Z., Zhao, W., Zuo, Z., Li, J. and Chen, I., An Origami-Inspired Negative Pressure Folding Actuator Coupling Hardness with Softness. Actuators, 2023, 12(1): 35. https://doi.org/10.3390/act12010035 doi: 10.3390/act12010035
|
| [13] | Keya, J.J., Akter, M., Kabir, A., Ishii, S. and Kakugo, A., Fabrication of Artificial Muscle from Microtubules, Kinesins, and DNA Origami Nanostructures. Microtubules. Methods in Molecular Biology, 2022,231–240. https://doi.org/10.1007/978-1-0716-1983-4_15 |
| [14] | Zhang, Q., Fang, H. and Xu, J., Tunable dynamics in Yoshimura origami by harnessing pneumatic pressure. Journal of Sound and Vibration, 2023,544. https://doi.org/10.1016/j.jsv.2022.117407 |
| [15] |
Suzuki, H., Wood, R.J., Origami-inspired miniature manipulator for teleoperated microsurgery. Nature Machine Intelligence, 2020, 2(8): 437–446. https://doi.org/10.1038/s42256-020-0203-4 doi: 10.1038/s42256-020-0203-4
|
| [16] |
Huang, J., Zhou, J., Wang, Z., Law, J., Cao, H., Li, Y., et al., Modular Origami Soft Robot with the Perception of Interaction Force and Body Configuration. Advanced Intelligence Systems, 2022, 4: 2200081. https://doi.org/10.1002/aisy.202200081 doi: 10.1002/aisy.202200081
|
| [17] |
Overvelde, J.T.B., Kloek, T., D'haen, J.J.A. and Bertoldi, K., Amplifying the response of soft actuators by harnessing snap-through instabilities. Proceedings of the National Academy of Sciences, 2015,113(51): 14579–14584. https://doi.org/10.1073/pnas.1504947112 doi: 10.1073/pnas.1504947112
|
| [18] |
Lei, M., Hong, W., Zhao, Z., Hamel, C., Chen, M., Lu, H., et al., 3D Printing of Auxetic Metamaterials with Digitally Reprogrammable Shape. ACS Applied Materials and Interfaces, 2019, 11(25): 22768–22776. https://doi.org/10.1021/acsami.9b06081 doi: 10.1021/acsami.9b06081
|
| [19] |
Choi, W.J., Cheng, G., Huang, Z., Zhang, S., Norris, T.B. and Kotov, N.A., Terahertz circular dichroism spectroscopy of biomaterials enabled by kirigami polarization modulators. Nature Materials, 2019, 18: 820–826. https://doi.org/10.1038/s41563-019-0404-6 doi: 10.1038/s41563-019-0404-6
|
| [20] |
Castle, T., Sussman, D.M., Tanis, M. and Kamien, R.D., Additive lattice kirigami. Science Advances, 2016, 2(9): 8200–8205. https://doi.org/10.1126/sciadv.1601258 doi: 10.1126/sciadv.1601258
|
| [21] |
Rafsanjani, A. and Bertoldi, K., Buckling-Induced Kirigami. Physical review letters, 2017,118(8): 084301. https://doi.org/10.1103/PhysRevLett.118.084301 doi: 10.1103/PhysRevLett.118.084301
|
| [22] |
Shyu, T.C., Damasceno, P.F., Dodd, P.M., Lamoureux, A., Xu, L., Shlian, M.A., et al., kirigami approach to engineering elasticity in nanocomposites through patterned defects. Nature Materials, 2015, 14: 785–789. https://doi.org/10.1038/nmat4327 doi: 10.1038/nmat4327
|
| [23] |
Guan, Y.S., Zhang, Z., Tang, Y., Yin, J. and Ren, S., Kirigami-Inspired nanoconfined polymer conducting nanosheets with 2000% stretchability. Advanced Materials, 2018, 30: 1706390. https://doi.org/10.1002/adma.201706390 doi: 10.1002/adma.201706390
|
| [24] |
Wang, W., Li, C., Rodrigue, H., Yuan, F., Han, M.W., Cho, M., et al., Kirigami/Origami‐Based Soft Deployable Reflector for Optical Beam Steering. Advanced Materials, 2017, 27: 1604214. https://doi.org/10.1002/adfm.201604214 doi: 10.1002/adfm.201604214
|
| [25] |
Neville, R.M., Scarpa, F. and Pirrera, A., Shape morphing Kirigami mechanical metamaterials. Scientific Reports, 2016, 6: 31067. https://doi.org/10.1038/srep31067 doi: 10.1038/srep31067
|
| [26] |
Blees, M.K., Barnard, A.W., Rose, P.A., Roberts, S.P., McGill, K.L., Huang, P.Y., et al., Graphene Kirigami. Nature, 2015,524: 204–207. https://doi.org/10.1038/nature14588 doi: 10.1038/nature14588
|
| [27] |
Song, Z., Wang, X., Lv, C., An, Y., Liang, M., Ma, T., et al., Kirigami-based stretchable lithium-ion batteries. Scientific Reports, 2015, 5: 10988. https://doi.org/10.1038/srep10988 doi: 10.1038/srep10988
|
| [28] |
Zhao, R., Lin, S., Yuk, H. and Zhao, X., Kirigami enhances film adhesion. Soft Matter, 2018, 14: 2515–2525. https://doi.org/10.1039/C7SM02338C doi: 10.1039/C7SM02338C
|
| [29] |
Morikawa, Y., Yamagiwa, S., Sawahata, H., Numano, R., Koida, K., Ishida, M., et al., Ultrastretchable Kirigami Bioprobes. Advanced Healthcare Materials, 2018, 7: 1701100. https://doi.org/10.1002/adhm.201701100 doi: 10.1002/adhm.201701100
|
| [30] |
Lamoureux, A., Lee, K., Shlian, M., Forrest, S.R. and Shtein, M., Dynamic kirigami structures for integrated solar tracking. Nature Communications, 2015, 6: 8092. https://doi.org/10.1038/ncomms9092 doi: 10.1038/ncomms9092
|
| [31] |
Rafsanjani, A., Zhang, Y., Liu, B., Rubinstein, S.M. and Bertoldi, K., Kirigami skins make a simple soft actuator crawl. Science Robotics, 2018, 3(15): 75–55. 10.1126/scirobotics.aar7555 doi: 10.1126/scirobotics.aar7555
|
| [32] |
Rafsanjani, A., Jin, L., Deng, B. and Bertoldi, K., Propagation of pop ups in kirigami shells. Proceedings of the National Academy of Sciences, 2019,116(7): 8200–8205. https://doi.org/10.1073/pnas.1817763116 doi: 10.1073/pnas.1817763116
|
| [33] |
Hwang, D.G. and Bartlett, M.D., Tunable Mechanical Metamaterials through HybridKirigami Structures. Scientific Reports, 2018, 8: 3378. https://doi.org/10.1038/s41598-018-21479-7 doi: 10.1038/s41598-018-21479-7
|
| [34] | Cruz-Santos, N., Caracterización de elastómeros líquidos para análisis de deformaciones en Actuadores Inflables Elásticos, a través de la evaluación de modelos hiperelásticos. MSc thesis, 2020, 35. Instituto Politécnico Nacional, México. |











Figures(12)
X. Yamile Sandoval-Castro, Eduardo Castillo-Castaneda, Benigno Munoz-Barron, Maximiano F. Ruiz-Torres. Mechanical programmable design of soft pneumatic actuators with kirigami patterns to generate expanding, bending and twisting motions[J]. STEM Education, 2023, 3(1): 15-27. doi: 10.3934/steme.2023002







 DownLoad:
DownLoad: