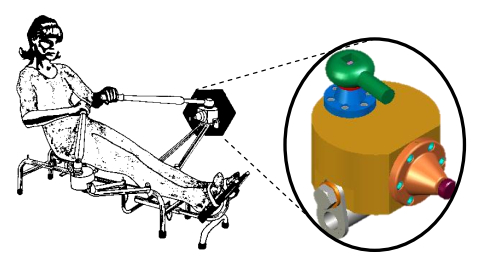
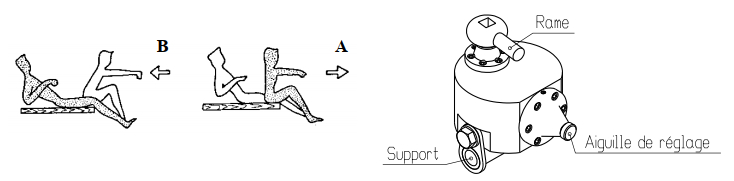
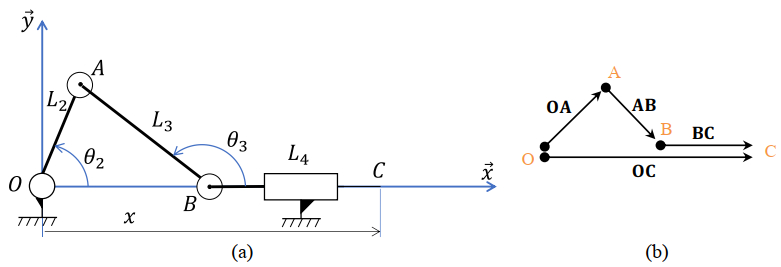
This paper illustrates the conducted effort to introduce the methodology of optimal synthesis of mechanisms through an engineering problem under Matlab. This project is part of a first course on poly-articulated mechanisms and robotics at the graduate level. The course combines both the theoretical and implementation under Matlab aspects to achieve its goals. The example of the rowing machine is considered to introduce the crank-slider mechanism and the kinematic analysis using complex numbers. The mechanism is associated with a spring to ensure the device simulating the resistance in the rowing bench simulator. The optimal synthesis problem is formulated for the desired effort to perform and solved using the Sequential Quadratic Programming method. All developments are implemented under Matlab.
Citation: Med Amine LARIBI. Optimal synthesis of a planar mechanism using Matlab: Example of slider crank in a rowing motion[J]. STEM Education, 2023, 3(1): 1-14. doi: 10.3934/steme.2023001
This paper illustrates the conducted effort to introduce the methodology of optimal synthesis of mechanisms through an engineering problem under Matlab. This project is part of a first course on poly-articulated mechanisms and robotics at the graduate level. The course combines both the theoretical and implementation under Matlab aspects to achieve its goals. The example of the rowing machine is considered to introduce the crank-slider mechanism and the kinematic analysis using complex numbers. The mechanism is associated with a spring to ensure the device simulating the resistance in the rowing bench simulator. The optimal synthesis problem is formulated for the desired effort to perform and solved using the Sequential Quadratic Programming method. All developments are implemented under Matlab.

| [1] | Meriam, J.L. and Kraige, L.G., Engineering mechanics, Volume 2 Dynamics, Wiley, 1997. |
| [2] |
Thibaut L., Ceuppens S., De Loof H., De Meester J., Goovaerts L., Struyf A., et al. (2018) Integrated STEM education: A systematic review of instructional practices in secondary education. European Journal of STEM Education 3: 2. 
|
| [3] |
Ghani U., Zhai X., Ahmad R. (2021) Mathematics skills and STEM multidisciplinary literacy: Role of learning capacity. STEM Education 1: 104.
|
| [4] | Koleza, E. and Skordoulis, C.D., Innovating STEM Education: Increased Engagement and Best Practices. Champaign, IL: Common Ground Research Networks. https://doi.org/10.18848/978-1-86335-251-2/CGP |
| [5] | Erdman, A.G. and Sandor, G.N., Mechanism Design: Analysis and Synthesis, 4th ed.; Pearson: London, UK, 2001. |
| [6] |
Cabrera J., Simon A., Prado M. (2002) Optimal synthesis of mechanisms with genetic algorithms. Mech Mach Theory 37: 1165-1177.
|
| [7] |
Laribi M., Mlika A., Romdhane L., Zeghloul S. (2004) A combined genetic algorithm-fuzzy logic method GA-FL in mechanisms synthesis. Mech Mach Theory 39: 717-735.
|
| [8] | McCarthy, J.M. and Joskowicz, L., Kinematic synthesis, Cambridge University Press, 2009. |
| [9] |
Hernández A., Muñoyerro A., Urízar M., Amezua E. (2021) Comprehensive approach for the dimensional synthesis of a four-bar linkage based on path assessment and reformulating the error function. Mech Mach Theory 156: 104126.
|
| [10] | Constans, E. and Dyer, K.B., Introduction to Mechanism Design with Computer Applications, CRC Press Taylor & Francis Group, 2019. https://doi.org/10.1201/b22145 |
| [11] | Nocedal, J. and Wright, S., Numerical Optimization, Springer, 2006. |
Figures(10) / Tables(6)
Med Amine LARIBI. Optimal synthesis of a planar mechanism using Matlab: Example of slider crank in a rowing motion[J]. STEM Education, 2023, 3(1): 1-14. doi: 10.3934/steme.2023001







 DownLoad:
DownLoad: