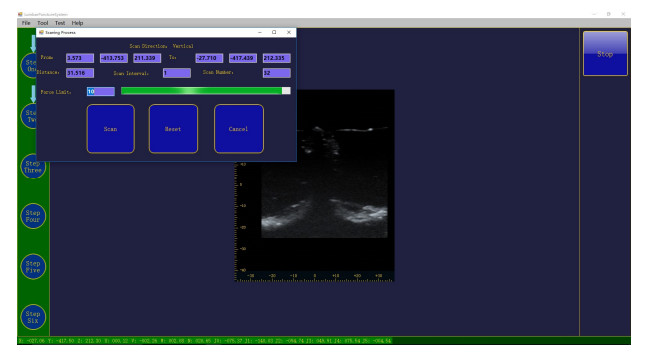
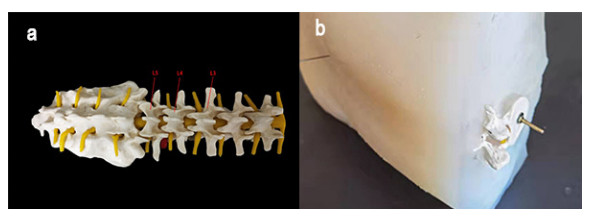
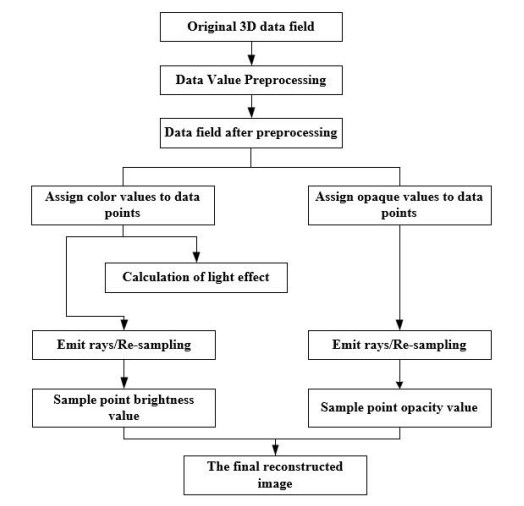
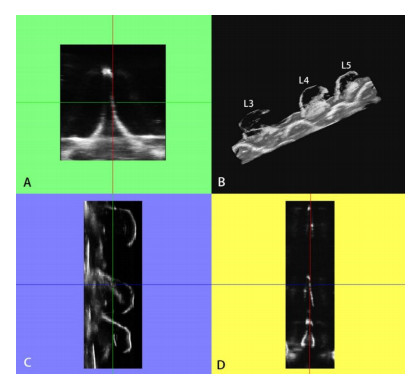
In lumbar puncture surgery, compared with the conventional methodologies like computed tomography and magnetic resonance imaging, ultrasound imaging offers the advantages of being low cost, no radiation and real-time image generation. However, the use of ultrasound equipment in lumbar puncture involves a cumbersome and time-consuming process for the subjective imaging of the overall structure of the lumbar spine in order to determine the exact puncture point and path. Meanwhile, the robotic arm puncture system has the advantages of high precision, good stability and simple and efficient operation. As a result, robotic-assisted ultrasound scanning is valuable for the assessment of a puncture path in spinal tap surgery. In this pursuit, based on the official URSDK development package for a robot arm and the Transmission Control Protocol/Internet Protocol, the system proposed in the present study involves a program to control the robot arm to clamp down onto an ultrasonic probe to enable automatic scanning and acquisition of images. A three-dimensional reconstruction program based on the visualization toolkit was designed, and a lumbar spine experiment was conducted with this system. A total of 136 two-dimensional ultrasound images were collected in the lumbar spine model experiment by enhancing contrast of and denoising the original ultrasound images, and a linear interpolation algorithm was used to perform the three-dimensional reconstruction of the lumbar spine model. The reconstructed structure was defective, but the location of the spinous process gap was determined with the sagittal and coronal images. The feasibility of the system was verified by the reconstruction results, which can provide a reference for determining the puncture point and path planning in the lumbar puncture surgery.
Citation: Wenlu Zhang, Ziyue Ma, Hong Wang, Juan Deng, Pengfei Li, Yu Jia, Yabin Dong, Hong Sha, Feng Yan, Wenjun Tu. Study on automatic ultrasound scanning of lumbar spine and visualization system for path planning in lumbar puncture surgery[J]. Mathematical Biosciences and Engineering, 2023, 20(1): 613-623. doi: 10.3934/mbe.2023028
In lumbar puncture surgery, compared with the conventional methodologies like computed tomography and magnetic resonance imaging, ultrasound imaging offers the advantages of being low cost, no radiation and real-time image generation. However, the use of ultrasound equipment in lumbar puncture involves a cumbersome and time-consuming process for the subjective imaging of the overall structure of the lumbar spine in order to determine the exact puncture point and path. Meanwhile, the robotic arm puncture system has the advantages of high precision, good stability and simple and efficient operation. As a result, robotic-assisted ultrasound scanning is valuable for the assessment of a puncture path in spinal tap surgery. In this pursuit, based on the official URSDK development package for a robot arm and the Transmission Control Protocol/Internet Protocol, the system proposed in the present study involves a program to control the robot arm to clamp down onto an ultrasonic probe to enable automatic scanning and acquisition of images. A three-dimensional reconstruction program based on the visualization toolkit was designed, and a lumbar spine experiment was conducted with this system. A total of 136 two-dimensional ultrasound images were collected in the lumbar spine model experiment by enhancing contrast of and denoising the original ultrasound images, and a linear interpolation algorithm was used to perform the three-dimensional reconstruction of the lumbar spine model. The reconstructed structure was defective, but the location of the spinous process gap was determined with the sagittal and coronal images. The feasibility of the system was verified by the reconstruction results, which can provide a reference for determining the puncture point and path planning in the lumbar puncture surgery.

| [1] |
G. Gandaglia, K. R. Ghani, A. Sood, J. R. Meyers, J. D. Sammon, M. Schmid, et al., Effect of minimally invasive surgery on the risk for surgical site infections: results from the National Surgical Quality Improvement Program (NSQIP) Database, JAMA Surg., 149 (2014), 1039–1044. https://doi.org/10.1001/jamasurg.2014.292 doi: 10.1001/jamasurg.2014.292

|
| [2] |
J. P. Dyke, H. S. Xu, A. Verma, H. U. Voss, J. L. Chazen, MRI characterization of early CNS transport kinetics post intrathecal gadolinium injection: Trends of subarachnoid and parenchymal distribution in healthy volunteers, Clin. Imaging, 68 (2020), 1–6. https://doi.org/10.1016/j.clinimag.2020.04.043 doi: 10.1016/j.clinimag.2020.04.043
|
| [3] |
A. M. Khalaf, V. Yedavalli, T. F. Massoud, Magnetic resonance imaging anatomy and morphometry of lumbar intervertebral foramina to guide safe transforaminal subarachnoid punctures, Clin. Anat., 33 (2020), 405–413. https://doi.org/10.1002/ca.23533 doi: 10.1002/ca.23533
|
| [4] |
U. Jung, H. Choi, Active echo signals and image optimization techniques via software filter correction of ultrasound system, Appl. Acoust., 188 (2022), 108519. https://doi.org/10.1016/j.apacoust.2021.108519 doi: 10.1016/j.apacoust.2021.108519
|
| [5] | A. S. B. Mustafa, T. Ishii, Y. Matsunaga, R. Nakadate, H. Ishii, K. Ogawa, et al., Development of robotic system for autonomous liver screening using ultrasound scanning device, in 2013 IEEE International Conference on Robotics and Biomimetics (ROBIO), (2013), 804–809. https://doi.org/10.1109/ROBIO.2013.6739561 |
| [6] | K. Masuda, Y. Takachi, Y. Urayama, T. Yoshinaga, Development of support system to handle ultrasound probe by coordinated motion with medical robot, in 2011 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, (2011), 4519–4522. https://doi.org/10.1109/IEMBS.2011.6091120 |
| [7] | B. Wu, Q. Huang, A Kinect-based automatic ultrasound scanning system, in 2016 International Conference on Advanced Robotics and Mechatronics (ICARM), (2016), 585–590. https://doi.org/10.1109/ICARM.2016.7606986 |
| [8] |
X. Zhao, T. Yang, J. Han, W. Xu, A review on the robot-assisted needle puncture technology, Chin. Sci. Bull., 58 (2013), 20–27. https://doi.org/10.1360/972013-952 doi: 10.1360/972013-952
|
| [9] |
K. Kim, H. Choi, High-efficiency high-voltage class F amplifier for high-frequency wireless ultrasound systems, PLOS One, 16 (2021), e0249034. https://doi.org/10.1371/journal.pone.0249034 doi: 10.1371/journal.pone.0249034
|
| [10] |
J. S. Park, M. S. Chung, S. B. Hwang, Y. S. Lee, D. H. Har, H. S. Park, Visible Korean Human: Improved serially sectioned images of the entire body, IEEE Trans. Med. Imaging, 24 (2005), 352–360. https://doi.org/10.1109/TMI.2004.842454 doi: 10.1109/TMI.2004.842454
|
| [11] |
H. Q. Jiang, B. S. Wang, G. F. Zhang, H. J. Bao, High-quality texture mapping for complex 3D scenes, Chin. J. Comput., 38 (2015), 2349–2360. https://doi.org/10.11897/SP.J.1016.2015.02349 doi: 10.11897/SP.J.1016.2015.02349
|
| [12] |
T. R. Nelson, A. Tran, H. Fakourfar, J. Nebeker, Positional calibration of an ultrasound image-guided robotic breast biopsy system, J. Ultrasound Med., 31 (2012), 351–359. https://doi.org/10.7863/jum.2012.31.3.351 doi: 10.7863/jum.2012.31.3.351
|
| [13] |
T. K. Podder, I. Buzurovic, K. Huang, Y. Yu, MIRAB: An Image-Guided Multichannel Robot for Prostate Brachytherapy, Int. J. Radiat. Oncol. Biol. Phys., 78 (2010), S810. https://doi.org/10.1016/j.ijrobp.2010.07.1876 doi: 10.1016/j.ijrobp.2010.07.1876
|
| [14] |
D. R. Kaye, D. Stoianovici, M. Han, Robotic ultrasound and needle guidance for prostate cancer management: review of the contemporary literature, Curr. Opin. Urol., 24 (2014), 75–80. https://doi.org/10.1097/MOU.0000000000000011 doi: 10.1097/MOU.0000000000000011
|
| [15] |
R. Kojcev, B. Fuerst, O. Zettinig, J. Fotouhi, S. C. Lee, B. Frisch, et al., Dual-robot ultrasound-guided needle placement: closing the planning-imaging-action loop, Int. J. Comput. Assisted Radiol. Surg., 11 (2016), 1173–1181. https://doi.org/10.1007/s11548-016-1408-1 doi: 10.1007/s11548-016-1408-1
|
| [16] | J. Xu, K. Chen, X. Yang, J. Li, S. Zhu, T. Lu, et al. Robotic system of microwave coagulation therapy for liver cancer based on ultrasound navigation, 29 (2007), Robot, 456–462. https://doi.org/10.3321/j.issn:1002-0446.2007.05.008 |

Figures(6)

Wenlu Zhang, Ziyue Ma, Hong Wang, Juan Deng, Pengfei Li, Yu Jia, Yabin Dong, Hong Sha, Feng Yan, Wenjun Tu. Study on automatic ultrasound scanning of lumbar spine and visualization system for path planning in lumbar puncture surgery[J]. Mathematical Biosciences and Engineering, 2023, 20(1): 613-623. doi: 10.3934/mbe.2023028







 DownLoad:
DownLoad: