An attempt is made in this paper to devise a finite-time adaptive fuzzy back-stepping control scheme for a class of multi-input and multi-output (MIMO) coupled nonlinear systems with immeasurable states. In view of the uncertainty of the system, adaptive fuzzy logic systems (AFLSs) are used to approach the uncertainty of the system, and the unmeasured states of the system are estimated by the finite-time extend state observers (FT-ESOs), where the state of the observer is a sphere around the state of the system. The accuracy and efficiency of the control effect are ensured by combining the back-stepping and finite-time theory. It is proved that all the states of the closed-loop adaptive control system are semi-global practical finite-time stability (SGPFS) by the finite-time Lyapunov stability theorem, and the tracking errors of the system states converge to a tiny neighborhood of the origin in a finite time. The validity of this scheme is demonstrated by a simulation.
Citation: Chao Wang, Cheng Zhang, Dan He, Jianliang Xiao, Liyan Liu. Observer-based finite-time adaptive fuzzy back-stepping control for MIMO coupled nonlinear systems[J]. Mathematical Biosciences and Engineering, 2022, 19(10): 10637-10655. doi: 10.3934/mbe.2022497
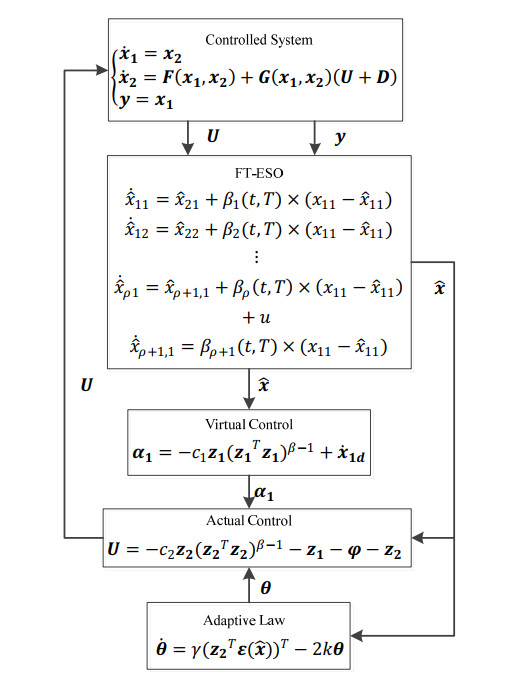
An attempt is made in this paper to devise a finite-time adaptive fuzzy back-stepping control scheme for a class of multi-input and multi-output (MIMO) coupled nonlinear systems with immeasurable states. In view of the uncertainty of the system, adaptive fuzzy logic systems (AFLSs) are used to approach the uncertainty of the system, and the unmeasured states of the system are estimated by the finite-time extend state observers (FT-ESOs), where the state of the observer is a sphere around the state of the system. The accuracy and efficiency of the control effect are ensured by combining the back-stepping and finite-time theory. It is proved that all the states of the closed-loop adaptive control system are semi-global practical finite-time stability (SGPFS) by the finite-time Lyapunov stability theorem, and the tracking errors of the system states converge to a tiny neighborhood of the origin in a finite time. The validity of this scheme is demonstrated by a simulation.

| [1] |
F. Lin, P. Shieh, P. Chou, Robust Adaptive back-stepping motion control of linear ultrasonic motors using fuzzy neural network, IEEE Trans. Fuzzy Syst., 16 (2008), 676-692. https://doi.org/10.1109/TFUZZ.2008.921400 doi: 10.1109/TFUZZ.2008.921400

|
| [2] |
C. Lin, H. Li, TSK Fuzzy CMAC-based robust adaptive back-stepping control for uncertain nonlinear systems, IEEE Trans. Fuzzy Syst., 20 (2012), 1147-1154. https://doi.org/10.1109/TFUZZ.2012.2191789 doi: 10.1109/TFUZZ.2012.2191789
|
| [3] |
J. Peng, R. Dubay, Adaptive fuzzy back-stepping control for a class of uncertain nonlinear strict-feedback systems based on dynamic surface control approach, Expert Syst. Appl., 120 (2019), 239-252. https://doi.org/10.1016/j.eswa.2018.11.040 doi: 10.1016/j.eswa.2018.11.040
|
| [4] |
W. Min, Q. Liu, An improved adaptive fuzzy back-stepping control for nonlinear mechanical systems with mismatched uncertainties, Automatika, 60 (2019), 1-10. https://doi.org/10.1080/00051144.2018.1563357 doi: 10.1080/00051144.2018.1563357
|
| [5] |
C. Lin, C. Hsueh, C. Chen, Robust adaptive back-stepping control for a class of nonlinear systems using recurrent wavelet neural network, Neurocomputing, 142 (2014), 372-382. https://doi.org/10.1016/j.neucom.2014.04.023 doi: 10.1016/j.neucom.2014.04.023
|
| [6] |
X. Cao, P. Shi, Z. Li, M. Liu, Neural-network-based adaptive back-stepping control with application to spacecraft attitude regulation, IEEE Trans. Neural Networks Learn. Syst., 29 (2018), 4303-4313. https://doi.org/10.1109/TNNLS.2017.2756993 doi: 10.1109/TNNLS.2017.2756993
|
| [7] |
W. Chen, L. Jiao, R. Li, J. Li, Adaptive back-stepping fuzzy control for nonlinearly parameterized systems with periodic disturbances, IEEE Trans. Fuzzy Syst., 18 (2010), 674-685. https://doi.org/10.1109/TFUZZ.2010.2046329 doi: 10.1109/TFUZZ.2010.2046329
|
| [8] |
Y. Liu, Q. Zhu, N. Zhao, L. Wang, Adaptive fuzzy back-stepping control for nonstrict feedback nonlinear systems with time-varying state constraints and backlash-like hysteresis, Inf. Sci., 574 (2021), 606-624. https://doi.org/10.1016/j.ins.2021.07.068 doi: 10.1016/j.ins.2021.07.068
|
| [9] |
X. Y. Luo, Z. H. Zhu, X. P. Guan, Adaptive fuzzy dynamic surface control for uncertain nonlinear systems, Int. J. Autom. Comput., 6 (2009), 385-390. https://doi.org/10.1007/s11633-009-0385-z doi: 10.1007/s11633-009-0385-z
|
| [10] |
P. Chen, T. Zhang, Adaptive dynamic surface control of stochastic nonstrict feedback constrained nonlinear systems with input and state unmodeled dynamics, Int. J. Adapt. Control Signal Process., 34 (2020), 1405-1429. https://doi.org/10.1002/acs.3157 doi: 10.1002/acs.3157
|
| [11] |
J. Yu, Y. Ma, H. Yu, C. Lin, Adaptive fuzzy dynamic surface control for induction motors with iron losses in electric vehicle drive systems via back-stepping, Inf. Sci., 376 (2017), 172-189. https://doi.org/10.1016/j.ins.2016.10.018 doi: 10.1016/j.ins.2016.10.018
|
| [12] |
Q. Zhao, Y. Lin, Adaptive fuzzy dynamic surface control with pre-specified tracking performance for a class of nonlinear systems, Asian J. Control, 13 (2011), 1082-1091. https://doi.org/10.1002/asjc.236 doi: 10.1002/asjc.236
|
| [13] |
X. Shi, Y. Cheng, C. Yin, X. Huang, S. Zhong, Design of adaptive back-stepping dynamic with RBF neural network for uncertain nonlinear system surface control method, Neurocomputing, 330 (2019), 490-503. https://doi.org/10.1016/j.neucom.2018.11.029 doi: 10.1016/j.neucom.2018.11.029
|
| [14] |
H. Dastres, B. Rezaie, B. Baigzadehnoe, Neural-network-based adaptive back-stepping control for a class of unknown nonlinear time-delay systems with unknown input saturation, Neurocomputing, 398 (2020), 131-152. https://doi.org/10.1016/j.neucom.2020.02.070 doi: 10.1016/j.neucom.2020.02.070
|
| [15] |
S. Tong, C. Li, Y. Li, Fuzzy adaptive observer back-stepping control for MIMO nonlinear systems, Fuzzy Sets Syst., 160 (2009), 2755-2775. https://doi.org/10.1016/j.fss.2009.03.008 doi: 10.1016/j.fss.2009.03.008
|
| [16] | C. Lee, J. Chien, H. Chang, C. Kuo, H. Chang, Direct adaptive back-stepping control for a class of mimo non-affine systems using recurrent neural networks, Lect. Notes Eng. Comput. Sci., (2009), 2174. |
| [17] |
S. C. Tong, Y. M. Li, G. Feng, T. S. Li, Observer-based adaptive fuzzy back-stepping dynamic surface control for a class of MIMO nonlinear systems, IEEE Trans. Syst. Man Cybern. Part B Cybern., 41 (2011), 1124-1135. https://doi.org/10.1109/TSMCB.2011.2108283 doi: 10.1109/TSMCB.2011.2108283
|
| [18] |
W. Chen, J. Li, Globally decentralized adaptive back-stepping neural network tracking control for unknown nonlinear interconnected systems, Asian J. Control, 12 (2010), 96-102. https://doi.org/10.1002/asjc.160 doi: 10.1002/asjc.160
|
| [19] |
Y. Li, S. Tong, Y. Li, Observer-based adaptive fuzzy back-stepping dynamic surface control design and stability analysis for MIMO stochastic nonlinear systems, Nonlinear Dyn., 69 (2012), 1333-1349. https://doi.org/10.1007/s11071-012-0351-0 doi: 10.1007/s11071-012-0351-0
|
| [20] | Y. Liu, Q. Zhu. Adaptive neural network asymptotic control design for MIMO nonlinear systems based on event-triggered mechanism, Inf. Sci., 603 (2022), 91-105. https://doi.org/10.1016/j.ins.2022.04.048 |
| [21] |
K. Zheng, Q. Zhang, Y. Hu, B. Wu, Design of fuzzy system-fuzzy neural network back-stepping control for complex robot system, Inf. Sci., 546 (2021), 1230-1255. https://doi.org/10.1016/j.ins.2020.08.110 doi: 10.1016/j.ins.2020.08.110
|
| [22] |
F. Lin, P. Chou, Adaptive control of two-axis motion control system using interval type-2 fuzzy neural network, IEEE Trans. Ind. Electron., 56 (2009), 178-193. https://doi.org/10.1109/TIE.2008.927225 doi: 10.1109/TIE.2008.927225
|
| [23] |
J. Huang, M. Ri, D. Wu, S. Ri, Interval type-2 fuzzy logic modeling and control of a mobile two-wheeled inverted pendulum, IEEE Trans. Fuzzy Syst., 26 (2018), 2030-2038. https://doi.org/10.1109/TFUZZ.2017.2760283 doi: 10.1109/TFUZZ.2017.2760283
|
| [24] |
M. Y. Hsiao, T. H. S. Li, J. Z. Lee, C. H. Chao, S. H. Tsai, Design of interval type-2 fuzzy sliding-mode controller, Inf. Sci., 178 (2008), 1696-1716. https://doi.org/10.1016/j.ins.2007.10.019 doi: 10.1016/j.ins.2007.10.019
|
| [25] |
R. Shahnazi, Observer-based adaptive interval type-2 fuzzy control of uncertain MIMO nonlinear systems with unknown asymmetric saturation actuators, Neurocomputing, 171 (2016), 1053-1065. https://doi.org/10.1016/j.neucom.2015.07.098 doi: 10.1016/j.neucom.2015.07.098
|
| [26] |
Y. Chang, W. Chan, Adaptive dynamic surface control for uncertain nonlinear systems with interval type-2 fuzzy neural networks, IEEE Trans. Cybern., 44 (2014), 293-304. https://doi.org/10.1109/TCYB.2013.2253548 doi: 10.1109/TCYB.2013.2253548
|
| [27] |
S. Dian, Y. Hu, T. Zhao, J. Han, Adaptive back-stepping control for flexible-joint manipulator using interval type-2 fuzzy neural network approximator, Nonlinear Dyn., 97 (2019), 1567-1580. https://doi.org/10.1007/s11071-019-05073-8 doi: 10.1007/s11071-019-05073-8
|
| [28] |
R. Rahmani, H. Toshani, S. Mobayen, Consensus tracking of multi-agent systems using constrained neural-optimiser-based sliding mode control, Int. J. Syst. Sci., 51 (2020), 2653-2674. https://doi.org/10.1080/00207721.2020.1799257 doi: 10.1080/00207721.2020.1799257
|
| [29] |
W. Liu, Q. Ma, S. Xu, Z. Zhang, Adaptive finite-time event-triggered control for nonlinear systems with quantized input signals, Int. J. Robust Nonlinear Control, 31 (2021), 4764-4781. https://doi.org/10.1002/rnc.5510 doi: 10.1002/rnc.5510
|
| [30] |
J. Ding, W. Zhang, Finite-time adaptive control for nonlinear systems with uncertain parameters based on the command filters, Int. J. Robust Nonlinear Control, 35 (2021), 1754-1767. https://doi.org/10.1002/acs.3287 doi: 10.1002/acs.3287
|
| [31] |
S. Xie, M. Tao, Q. Chen, L. Tao, Neural-network-based adaptive finite-time output constraint control for rigid spacecrafts, Int. J. Robust Nonlinear Control, 32 (2022), 2983-3000. https://doi.org/10.1002/rnc.5766 doi: 10.1002/rnc.5766
|
| [32] |
Y. Wu, X. Xie, Adaptive pre-assigned finite-time stability of nonlinear systems with time-varying powers and full-state constraints, Int. J. Robust Nonlinear Control, 32 (2022), 2200-2211. https://doi.org/10.1002/rnc.5940 doi: 10.1002/rnc.5940
|
| [33] |
H. Liu, T. Zhang, Adaptive neural network finite-time control for uncertain robotic manipulators, J. Intell. Rob. Syst., 75 (2014), 363-377. https://doi.org/10.1007/s10846-013-9888-5 doi: 10.1007/s10846-013-9888-5
|
| [34] |
C. W. Chang, C. F. Hsu, T. T. Lee, Back-stepping-based finite-time adaptive fuzzy control of unknown nonlinear systems, Int. J. Fuzzy Syst., 20 (2018), 2545-2555. https://doi.org/10.1007/s40815-018-0505-4 doi: 10.1007/s40815-018-0505-4
|
| [35] |
Y. Li, K. Li, S. Tong, Finite-time adaptive fuzzy output feedback dynamic surface control for MIMO non-strict feedback systems, IEEE Trans. Fuzzy Syst., 27 (2019), 96-110. https://doi.org/10.1109/TFUZZ.2018.2868898 doi: 10.1109/TFUZZ.2018.2868898
|
| [36] |
S. Sui, C. L. P. Chen, S. Tong, Event-trigger-based finite-time fuzzy adaptive control for stochastic nonlinear system with unmodeled dynamics, IEEE Trans. Fuzzy Syst., 29 (2021), 1914-1926. https://doi.org/10.1109/TFUZZ.2020.2988849 doi: 10.1109/TFUZZ.2020.2988849
|
| [37] |
H. Wang, S. Kang, Z. Feng, Finite-time adaptive fuzzy command filtered backstepping control for a class of nonlinear systems, Int. J. Fuzzy Syst., 21 (2019), 2575-2587. https://doi.org/10.1007/s40815-019-00749-0 doi: 10.1007/s40815-019-00749-0
|
| [38] |
L. Liu, W. Zhao, Y. J. Liu, S. Tong, Y. Y. Wang, Adaptive finite-time neural network control of nonlinear systems with multiple objective constraints and application to electromechanical system, IEEE Trans. Neural Networks Learn. Syst., 32 (2021), 5416-5426. https://doi.org/10.1109/TNNLS.2020.3027689 doi: 10.1109/TNNLS.2020.3027689
|
| [39] |
L. Liu, Y. Cui, Y. J. Liu, S. Tong, Observer-based adaptive neural output feedback constraint controller design for switched systems under average dwell time, IEEE Trans. Circuits Syst. I Regul. Pap., 68 (2021), 3901-3912. https://doi.org/10.1109/TCSI.2021.3093326 doi: 10.1109/TCSI.2021.3093326
|
| [40] |
F. Wang, B. Chen, C. Lin, J. Zhang, X. Z. Meng, Adaptive neural network finite-time output feedback control of quantized nonlinear systems, IEEE Trans. Cybern., 48 (2018), 1839-1848. https://doi.org/10.1109/TCYB.2017.2715980 doi: 10.1109/TCYB.2017.2715980
|
| [41] |
B. Chen, F. Wang, X. P. Liu, C. Lin, Finite-time adaptive fuzzy tracking control design for nonlinear systems, IEEE Trans. Fuzzy Syst., 26 (2018), 1209-1216. https://doi.org/10.1109/TFUZZ.2017.2717804 doi: 10.1109/TFUZZ.2017.2717804
|
| [42] |
H. Razmjooei, M. H. Shafiei, A new approach to design a finite-time extended state observer: uncertain robotic manipulators application, Int. J. Robust Nonlinear Control, 31 (2021), 1288-1302. https://doi.org/10.1002/rnc.5346 doi: 10.1002/rnc.5346
|







Figures(8)

Chao Wang, Cheng Zhang, Dan He, Jianliang Xiao, Liyan Liu. Observer-based finite-time adaptive fuzzy back-stepping control for MIMO coupled nonlinear systems[J]. Mathematical Biosciences and Engineering, 2022, 19(10): 10637-10655. doi: 10.3934/mbe.2022497







 DownLoad:
DownLoad: