This paper presents a power system frequency control strategy that integrates an observer-based event-triggered mechanism (ETM) to defend against denial-of-service (DoS) attacks and accommodates the integration of renewable energy sources. The proposed strategy incorporates demand response by enabling air conditioning loads (ACs) to participate in frequency regulation, thereby enhancing system flexibility and stability. To address the challenges posed by limited network bandwidth and potential message blocking, the ETM minimizes communication while defending against DoS attacks. The stability of the closed-loop system is guaranteed by deriving an $ H_{\infty} $ stability criterion using the Lyapunov–Krasovskii function method, with controller parameters determined through linear matrix inequalities (LMIs). A two-area power system simulation is conducted to validate the feasibility and effectiveness of the proposed approach, demonstrating its ability to maintain stable frequency control under cyber-attack scenarios and varying renewable energy contributions.
Citation: Xiaoming Wang, Yunlong Bai, Zhiyong Li, Wenguang Zhao, Shixing Ding. Observer-based event triggering security load frequency control for power systems involving air conditioning loads[J]. Electronic Research Archive, 2024, 32(11): 6258-6275. doi: 10.3934/era.2024291
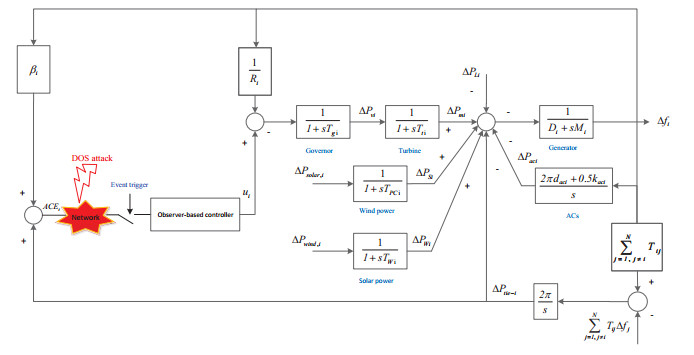
This paper presents a power system frequency control strategy that integrates an observer-based event-triggered mechanism (ETM) to defend against denial-of-service (DoS) attacks and accommodates the integration of renewable energy sources. The proposed strategy incorporates demand response by enabling air conditioning loads (ACs) to participate in frequency regulation, thereby enhancing system flexibility and stability. To address the challenges posed by limited network bandwidth and potential message blocking, the ETM minimizes communication while defending against DoS attacks. The stability of the closed-loop system is guaranteed by deriving an $ H_{\infty} $ stability criterion using the Lyapunov–Krasovskii function method, with controller parameters determined through linear matrix inequalities (LMIs). A two-area power system simulation is conducted to validate the feasibility and effectiveness of the proposed approach, demonstrating its ability to maintain stable frequency control under cyber-attack scenarios and varying renewable energy contributions.

| [1] |
C. Peng, J. Li, M. Fei, Resilient event-triggering $H_{\infty}$ load frequency control for multi-area power systems with energy-limited dos attacks, IEEE Trans. Power Syst., 32 (2016), 4110–4118. https://doi.org/10.1109/TPWRS.2016.2634122 doi: 10.1109/TPWRS.2016.2634122

|
| [2] |
Y. Güler, I. Kaya, Load frequency control of single-area power system with PI–PD controller design for performance improvement, J. Electr. Eng. Technol., 18 (2023), 2633–2648. https://doi.org/10.1007/s42835-022-01371-1 doi: 10.1007/s42835-022-01371-1
|
| [3] |
J. C. Vinitha, G. Ramadas, P. U. Rani, PSO based fuzzy logic controller for load frequency control in EV charging station, J. Electr. Eng. Technol., 19 (2024), 193–208. https://doi.org/10.1007/s42835-023-01568-y doi: 10.1007/s42835-023-01568-y
|
| [4] |
Y. Xue, X. Lei, F. Xue, C. Yu, C. Dong, F. Wen, et al., Comment on the impact of wind power uncertainty on power system, Proc. CSEE, 34 (2014), 5029–5040. https://doi.org/10.13334/j.0258-8013.pcsee.2014.29.004 doi: 10.13334/j.0258-8013.pcsee.2014.29.004
|
| [5] |
S. Wang, K. Tomsovic, Fast frequency support from wind turbine generators with auxiliary dynamic demand control, IEEE Trans. Power Syst., 34 (2019), 3340–3348. https://doi.org/10.1109/TPWRS.2019.2911232 doi: 10.1109/TPWRS.2019.2911232
|
| [6] |
D. Katipoğlu, S. Soylu, Design of optimal FOPI controller for two-area time-delayed load frequency control system with demand response, J. Electr. Eng. Technol., 19 (2024), 4073–4085. https://doi.org/10.1007/s42835-024-01900-0 doi: 10.1007/s42835-024-01900-0
|
| [7] |
V. Lakshmanan, M. Marinelli, J. Hu, H. W. Bindner, Provision of secondary frequency control via demand response activation on thermostatically controlled loads: solutions and experiences from denmark, Appl. Energy, 173 (2016), 470–480. https://doi.org/10.1016/j.apenergy.2016.04.054 doi: 10.1016/j.apenergy.2016.04.054
|
| [8] |
Q. Zhu, L. Jiang, W. Yao, C. Zhang, C. Luo, Robust load frequency control with dynamic demand response for deregulated power systems considering communication delays, Electr. Power Compon. Syst., 45 (2017), 75–87. https://doi.org/10.1080/15325008.2016.1233300 doi: 10.1080/15325008.2016.1233300
|
| [9] | N. Li, X. Wang, Research of air conditioners providing frequency controlled reserve for microgrid, Power Syst. Prot. Control, 43 (2015), 101–105. |
| [10] |
D. S. Callaway, Tapping the energy storage potential in electric loads to deliver load following and regulation, with application to wind energy, Energy Convers. Manage., 50 (2009), 1389–1400. https://doi.org/10.1016/j.enconman.2008.12.012 doi: 10.1016/j.enconman.2008.12.012
|
| [11] |
N. Lu, D. P. Chassin, S. E. Widergren, Modeling uncertainties in aggregated thermostatically controlled loads using a state queueing model, IEEE Trans. Power Syst., 20 (2005), 725–733. https://doi.org/10.1109/TPWRS.2005.846072 doi: 10.1109/TPWRS.2005.846072
|
| [12] | Z. Cai, Z. Zhang, Y. Yan, S. Liu, Multistage coordinated control risk dispatch considering the uncertainty of source-network, in 2022 4th International Conference on Power and Energy Technology (ICPET), (2022), 1305–1311. https://doi.org/10.1109/ICPET55165.2022.9918528 |
| [13] |
B. Pang, X. Jin, Q. Zhang, Y. Tang, K. Liao, J. Yang, et al., Transient ac overvoltage suppression orientated reactive power control of the wind turbine in the lcc-hvdc sending grid, CES Trans. Electr. Mach. Syst., 8 (2024), 152–161. https://doi.org/10.30941/CESTEMS.2024.00020 doi: 10.30941/CESTEMS.2024.00020
|
| [14] |
T. Li, Y. Li, Y. Zhu, Research on the voltage supporting capability of multi-VSC-HVDC subsystems operation strategy to receiving-end LCC-HVDC network in weakAC grid, CES Trans. Electr. Mach. Syst., 7 (2023), 11–20. https://doi.org/10.30941/CESTEMS.2023.00007 doi: 10.30941/CESTEMS.2023.00007
|
| [15] |
A. Kazemy, J. Lam, X. Zhang, Event-triggered output feedback synchronization of master–slave neural networks under deception attacks, IEEE Trans. Neural Networks Learn. Syst., 33 (2020), 952–961. https://doi.org/10.1109/TNNLS.2020.3030638 doi: 10.1109/TNNLS.2020.3030638
|
| [16] |
X. Zhang, Q. Han, B. Zhang, X. Ge, D. Zhang, Accumulated-state-error-based event-triggered sampling scheme and its application to $H_{\infty}$ control of sampled-data systems, Sci. China Inf. Sci., 67 (2024), 162206. https://doi.org/10.1007/s11432-023-4038-3 doi: 10.1007/s11432-023-4038-3
|
| [17] |
R. Ji, S. S. Ge, Event-triggered tunnel prescribed control for nonlinear systems, IEEE Trans. Fuzzy Syst., 32 (2023), 90–101. https://doi.org/10.1109/TFUZZ.2023.3290934 doi: 10.1109/TFUZZ.2023.3290934
|
| [18] |
G. Zhang, S. Yin, C. Huang, W. Zhang, J. Li, Structure synchronized dynamic event-triggered control for marine ranching AMVs via the multi-task switching guidance, IEEE Trans. Intell. Transp. Syst., 2024. https://doi.org/10.1109/TITS.2024.3463181 doi: 10.1109/TITS.2024.3463181
|
| [19] |
Y. Xiao, W. Che, Event-triggered fully distributed $H_{\infty}$ containment control for MASs, IEEE Trans. Syst. Man Cybern.: Syst., 54 (2024), 2676–2684. https://doi.org/10.1109/TSMC.2023.3342410 doi: 10.1109/TSMC.2023.3342410
|
| [20] |
J. P. Farwell, R. Rohozinski, Stuxnet and the future of cyber war, Survival, 53 (2011), 23–40. https://doi.org/10.1080/00396338.2011.555586 doi: 10.1080/00396338.2011.555586
|
| [21] |
D. Ding, Z. Wang, Q. Han, G. Wei, Security control for discrete-time stochastic nonlinear systems subject to deception attacks, IEEE Trans. Syst. Man Cybern.: Syst., 48 (2016), 779–789. https://doi.org/10.1109/TSMC.2016.2616544 doi: 10.1109/TSMC.2016.2616544
|
| [22] | W. Xu, W. Trappe, Y. Zhang, T. Wood, The feasibility of launching and detecting jamming attacks in wireless networks, in MobiHoc '05: Proceedings of the 6th ACM International Symposium on Mobile ad hoc Networking and Computing, (2005), 46–57. https://doi.org/10.1145/1062689.1062697 |
| [23] | H. S. Foroush, S. Martinez, On event-triggered control of linear systems under periodic denial-of-service jamming attacks, in 2012 IEEE 51st IEEE Conference on Decision and Control (CDC), (2012), 2551–2556. https://doi.org/10.1109/CDC.2012.6425868 |
| [24] |
C. De Persis, P. Tesi, Input-to-state stabilizing control under denial-of-service, IEEE Trans. Autom. Control, 60 (2015), 2930–2944. https://doi.org/10.1109/TAC.2015.2416924 doi: 10.1109/TAC.2015.2416924
|
| [25] |
L. Jin, Y. He, C. Zhang, X. Shangguan, L. Jiang, M. Wu, Equivalent input disturbance-based load frequency control for smart grid with air conditioning loads, Sci. China Inf. Sci., 65 (2022), 122205. https://doi.org/10.1007/s11432-020-3120-0 doi: 10.1007/s11432-020-3120-0
|
| [26] |
D. Yue, E. Tian, Q. Han, A delay system method for designing event-triggered controllers of networked control systems, IEEE Trans. Autom. Control, 58 (2012), 475–481. https://doi.org/10.1109/TAC.2012.2206694 doi: 10.1109/TAC.2012.2206694
|
| [27] |
X. Zhang, Q. Han, B. Zhang, An overview and deep investigation on sampled-data-based event-triggered control and filtering for networked systems, IEEE Trans. Ind. Inf., 13 (2016), 4–16. https://doi.org/10.1109/TII.2016.2607150 doi: 10.1109/TII.2016.2607150
|
| [28] |
W. P. M. H. Heemels, M. C. F. Donkers, A. R. Teel, Periodic event-triggered control for linear systems, IEEE Trans. Autom. Control, 58 (2012), 847–861. https://doi.org/10.1109/TAC.2012.2220443 doi: 10.1109/TAC.2012.2220443
|
| [29] |
H. Zhang, J. Liu, S. Xu, H-infinity load frequency control of networked power systems via an event-triggered scheme, IEEE Trans. Ind. Electron., 67 (2019), 7104–7113. https://doi.org/10.1109/TIE.2019.2939994 doi: 10.1109/TIE.2019.2939994
|
| [30] |
C. De Persis, P. Tesi, Resilient control under denial-of-service, IFAC Proc. Volumes, 47 (2014), 134–139. https://doi.org/10.3182/20140824-6-ZA-1003.02184 doi: 10.3182/20140824-6-ZA-1003.02184
|
| [31] |
K. Lu, G. Zeng, X. Luo, J. Weng, Y. Zhang, M. Li, An adaptive resilient load frequency controller for smart grids with DoS attacks, IEEE Trans. Veh. Technol., 69 (2020), 4689–4699. https://doi.org/10.1109/TVT.2020.2983565 doi: 10.1109/TVT.2020.2983565
|
| [32] |
Y. Qi, S. Yuan, B. Niu, Asynchronous control for switched T–S fuzzy systems subject to data injection attacks via adaptive event-triggering schemes, IEEE Trans. Syst. Man Cybern.: Syst., 52 (2021), 4658–4670. https://doi.org/10.1109/TSMC.2021.3100481 doi: 10.1109/TSMC.2021.3100481
|
| [33] |
H. Sun, C. Peng, D. Yue, Y. L. Wang, T. Zhang, Resilient load frequency control of cyber-physical power systems under QoS-dependent event-triggered communication, IEEE Trans. Syst. Man Cybern.: Syst., 51 (2020), 2113–2122. https://doi.org/10.1109/TSMC.2020.2979992 doi: 10.1109/TSMC.2020.2979992
|
| [34] |
E. Tian, K. Wang, X. Zhao, S. Shen, J. Liu, An improved memory-event-triggered control for networked control systems, J. Franklin Inst., 356 (2019), 7210–7223. https://doi.org/10.1016/j.jfranklin.2019.06.041 doi: 10.1016/j.jfranklin.2019.06.041
|
| [35] |
C. Peng, S. Ma, X. Xie, Observer-based non-PDC control for networked T–S fuzzy systems with an event-triggered communication, IEEE Trans. Cybern., 47 (2017), 2279–2287. https://doi.org/10.1109/TCYB.2017.2659698 doi: 10.1109/TCYB.2017.2659698
|






Figures(7) / Tables(2)
Xiaoming Wang, Yunlong Bai, Zhiyong Li, Wenguang Zhao, Shixing Ding. Observer-based event triggering security load frequency control for power systems involving air conditioning loads[J]. Electronic Research Archive, 2024, 32(11): 6258-6275. doi: 10.3934/era.2024291







 DownLoad:
DownLoad: