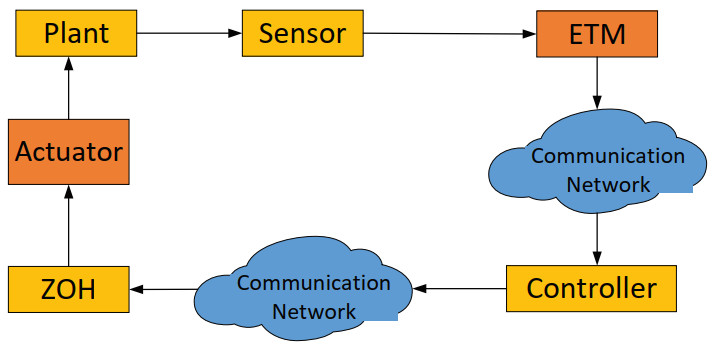
In this paper, a reliable $ H_\infty $ control approach under a novel adaptive event-triggering mechanism (AETM) considering actuator faults for networked control systems (NCSs) is addressed. Firstly, the actuator faults are described by a series of independent stochastic variables obeying a certain probability distribution. Secondly, a novel AETM is presented. The triggering threshold can be dynamically adjusted according to the fluctuating trend of the current sampling state, resulting in saving more limited network resources while preserving good control performance. As a result, considering the packet dropout and packet disorder caused by the communication network, the sampling-data model of NCSs with AETM and actuator faults is constructed. Thirdly, by removing the involved auxiliary function and replacing it with a sequence of integrals only related to the system state, a novel integral inequality can be used to reduce conservatism. Thus, a new stability criterion and an event-triggered reliable $ H_\infty $ controller design approach can be obtained. Finally, the simulation results are presented to verify the progressiveness of our proposed approach.
Citation: Xingyue Liu, Kaibo Shi, Yiqian Tang, Lin Tang, Youhua Wei, Yingjun Han. A novel adaptive event-triggered reliable $ H_\infty $ control approach for networked control systems with actuator faults[J]. Electronic Research Archive, 2023, 31(4): 1840-1862. doi: 10.3934/era.2023095
In this paper, a reliable $ H_\infty $ control approach under a novel adaptive event-triggering mechanism (AETM) considering actuator faults for networked control systems (NCSs) is addressed. Firstly, the actuator faults are described by a series of independent stochastic variables obeying a certain probability distribution. Secondly, a novel AETM is presented. The triggering threshold can be dynamically adjusted according to the fluctuating trend of the current sampling state, resulting in saving more limited network resources while preserving good control performance. As a result, considering the packet dropout and packet disorder caused by the communication network, the sampling-data model of NCSs with AETM and actuator faults is constructed. Thirdly, by removing the involved auxiliary function and replacing it with a sequence of integrals only related to the system state, a novel integral inequality can be used to reduce conservatism. Thus, a new stability criterion and an event-triggered reliable $ H_\infty $ controller design approach can be obtained. Finally, the simulation results are presented to verify the progressiveness of our proposed approach.

| [1] | A. Bemporad, M. Heemels, M. Johansson, Networked Control Systems, Springer, London, 2010. https://doi.org/10.1007/978-0-85729-033-5 |
| [2] |
D. Zhang, P. Shi, Q. G. Wang, L. Yu, Analysis and synthesis of networked control systems: a survey of recent advances and challenges, ISA Trans., 66 (2017), 376–392. https://doi.org/10.1016/j.isatra.2016.09.026 doi: 10.1016/j.isatra.2016.09.026

|
| [3] | R. M. Murray, Future directions in control, dynamics, and systems: overview, grand challenges, and new courses, Eur. J. Control, 9 (2003), 144–158. Available from: http://users.cms.caltech.edu/murray/preprints/mur03-ejc.pdf. |
| [4] |
Y. Ma, Z. Q. Nie, S. L. Hu, Z. X. Li, R. Malekian, M. Sotelo, Fault detection filter and controller co-design for unmanned surface vehicles under dos attacks, IEEE Trans. Intell. Transp. Syst., 22 (2021), 1422–1434. https://doi.org/10.1109/TITS.2020.2970472 doi: 10.1109/TITS.2020.2970472
|
| [5] |
X. Shang-Guan, Y. He, C. K. Zhang, L. Jin, W. Yao, L. Jiang, et al., Control performance standards-oriented event-triggered load frequency control for power systems under limited communication bandwidth, IEEE Trans. Control Syst. Technol., 30 (2021), 860–868. https://doi.org/10.1109/TCST.2021.3070861 doi: 10.1109/TCST.2021.3070861
|
| [6] |
Q. S. Zhong, J. Yang, K. B. Shi, S. M. Zhong, Z. X. Li, M. A. Sotelo, Event-triggered $H_\infty$ load frequency control for multi-area nonlinear power systems based on non-fragile proportional integral control strategy, IEEE Trans. Intell. Transp. Syst., 23 (2021), 12191–12201. https://doi.org/10.1109/TITS.2021.3110759 doi: 10.1109/TITS.2021.3110759
|
| [7] |
C. Peng, J. Zhang, H. C. Yan, Adaptive event-triggering $H_\infty$ load frequency control for network-based power systems, IEEE Trans. Ind. Electron., 65 (2017), 1685–1694. https://doi.org/10.1109/TIE.2017.2726965 doi: 10.1109/TIE.2017.2726965
|
| [8] |
X. Shang-Guan, Y. He, C. Zhang, L. Jiang, J. W. Spencer, M. Wu, Sampled-data based discrete and fast load frequency control for power systems with wind power, Appl. Energy, 259 (2020), 114202. https://doi.org/10.1016/j.apenergy.2019.114202 doi: 10.1016/j.apenergy.2019.114202
|
| [9] |
K. Arora, A. Kumar, V. K. Kamboj, D. Prashar, S. Jha, B. Shrestha, et al., Optimization methodologies and testing on standard benchmark functions of load frequency control for interconnected multi area power system in smart grids, Mathematics, 8 (2020), 980. https://doi.org/10.3390/math8060980 doi: 10.3390/math8060980
|
| [10] |
K. Arora, A. Kumar, V. K. Kamboj, D. Prashar, B. Shrestha, G. P. Joshi, Impact of renewable energy sources into multi area multi-source load frequency control of interrelated power system, Mathematics, 9 (2021), 186. https://doi.org/10.3390/math9020186 doi: 10.3390/math9020186
|
| [11] |
L. Zhang, H. Gao, O. Kaynak, Network-induced constraints in networked control systems—a survey, IEEE Trans. Ind. Inf., 9 (2012), 403–416. https://doi.org/10.1109/TⅡ.2012.2219540 doi: 10.1109/TⅡ.2012.2219540
|
| [12] |
L. Hetel, C. Fiter, H. Omran, A. Seuret, E. Fridman, J. P. Richard, et al., Recent developments on the stability of systems with aperiodic sampling:an overview, Automatica, 76 (2017), 309–335. https://doi.org/10.1016/j.automatica.2016.10.023 doi: 10.1016/j.automatica.2016.10.023
|
| [13] |
Y. H. Choi, S. J. Yoo, Quantized-feedback-based adaptive event-triggered control of a class of uncertain nonlinear systems, Mathematics, 8 (2020), 1603. https://doi.org/10.3390/math8091603 doi: 10.3390/math8091603
|
| [14] |
B. R. Xu, B. Li, Event-triggered state estimation for fractional-order neural networks, Mathematics, 10 (2022), 325. https://doi.org/10.3390/math10030325 doi: 10.3390/math10030325
|
| [15] |
P. Tabuada, Event-triggered real-time scheduling of stabilizing control tasks, IEEE Trans. Autom. Control, 52 (2007), 1680–1685. https://doi.org/10.1109/TAC.2007.904277 doi: 10.1109/TAC.2007.904277
|
| [16] |
C. Peng, J. Zhang, Q. L. Han, Consensus of multi-agent systems with nonlinear dynamics using an intrgrated sampled-data-based event-triggered communication scheme, IEEE Trans. Syst. Man Cybern.: Syst., 49 (2018), 589–599. https://doi.org/10.1109/TSMC.2018.2814572 doi: 10.1109/TSMC.2018.2814572
|
| [17] |
D. Zhang, Q. L. Han, X. Jia, Network-based output tracking control for t-s fuzzy systems using an event-triggered communication scheme, Fuzzy Sets Syst., 273 (2015), 26–48. https://doi.org/10.1016/j.fss.2014.12.015 doi: 10.1016/j.fss.2014.12.015
|
| [18] |
C. Peng, S. Ma, X. Xie, Observer-based non-pdc control for networked t-s fuzzy systems with an event-triggered communication, IEEE Trans. Cybern., 47 (2017), 2279–2287. https://doi.org/10.1109/TCYB.2017.2659698 doi: 10.1109/TCYB.2017.2659698
|
| [19] |
Z. Wu, Y. Wu, Z. G. Wu, J. Lu, Event-based synchronization of heterogeneous complex networks subject to transmission delays, IEEE Trans. Syst. Man Cybern.: Syst., 48 (2017), 2126–2134. https://doi.org/10.1109/TSMC.2017.2723760 doi: 10.1109/TSMC.2017.2723760
|
| [20] |
X. M. Zhang, Q. L. Han, B. L. Zhang, An overview and deep investigation on sampled-data-based event-triggered control and filtering for networked systems, IEEE Trans. Ind. Inf., 13 (2016), 4–16. https://doi.org/10.1109/TⅡ.2016.2607150 doi: 10.1109/TⅡ.2016.2607150
|
| [21] |
W. P. M. H. Heemels, M. C. F. Donkers, A. R. Teel, Periodic event-triggered control for linear systems, IEEE Trans. Autom. Control, 58 (2012), 847–861. https://doi.org/10.1109/TAC.2012.2220443 doi: 10.1109/TAC.2012.2220443
|
| [22] |
C. Peng, M. Wu, X. Xie, Y. Wang, Event-triggered predictive control for networked nonlinear systems with inperfect premise matching, IEEE Trans. Fuzzy Syst., 26 (2018), 2797–2806. https://doi.org/10.1109/TFUZZ.2018.2799187 doi: 10.1109/TFUZZ.2018.2799187
|
| [23] |
S. Hu, D. Yue, $L_2$-gain analysis of event-triggered networked control systems: a discontinuous Lyapunov functional approach, Int. J. Robust Nonlinear Control, 23 (2013), 1277–1300. https://doi.org/10.1002/rnc.2815 doi: 10.1002/rnc.2815
|
| [24] |
E. Tian, C. Peng, Memory-based event-triggering $H_\infty$ load frequency control for power systems under deception attacks, IEEE Trans. Cybern., 50 (2020), 4610–4618. https://doi.org/10.1109/TCYB.2020.2972384 doi: 10.1109/TCYB.2020.2972384
|
| [25] |
H. T. Sun, C. Peng, W. D. Zhang, T. C. Yang, Z. W. Wang, Security-based resilient event-triggered control of networked control systems under denial of service attacks, J. Franklin Inst., 356 (2019), 10277–10295. https://doi.org/10.1016/j.jfranklin.2018.04.001 doi: 10.1016/j.jfranklin.2018.04.001
|
| [26] |
D. Yue, E. Tian, Q. L. Han, A delay system method for designing event-triggered controllers of networked control systems, IEEE Trans. Autom. Control, 58 (2012), 475–481. https://doi.org/10.1109/TAC.2012.2206694 doi: 10.1109/TAC.2012.2206694
|
| [27] |
S. Wen, X. Yu, Z. Zeng, J. Wang, Event-triggering load frequency control for multi-area power systems with communication delays, IEEE Trans. Ind. Electron., 63 (2015), 1308–1317. https://doi.org/10.1109/TIE.2015.2399394 doi: 10.1109/TIE.2015.2399394
|
| [28] |
L. Dong, Y. Tang, H. He, C. Sun, An event-triggered approach for load frequency control with supplementary ADP, IEEE Trans. Power Syst., 32 (2016), 581–589. https://doi.org/10.1109/TPWRS.2016.2537984 doi: 10.1109/TPWRS.2016.2537984
|
| [29] |
J. Yang, Q. S. Zhong, K. B. Shi, S. M. Shou, Co-design of observer-based fault detection filter and dynamic event-triggered controller for wind power system under dual alterable DoS attacks, IEEE Trans. Inf. Forensics Secur., 17 (2022), 1270–1284. https://doi.org/10.1109/TIFS.2022.3160355 doi: 10.1109/TIFS.2022.3160355
|
| [30] |
J. Yang, Q. S. Zhong, K. B. Shi, S. M. Shou, Dynamic-memory event-triggered $H_\infty$ load frequency control for reconstructed switched model of power systems under hybrid attacks, IEEE Trans. Cybern., 2022. https://doi.org/10.1109/TCYB.2022.3170560 doi: 10.1109/TCYB.2022.3170560
|
| [31] |
S. Wang, X. Meng, T. Chen, Wide-area control of power systems through delayed network communication, IEEE Trans. Control Syst. Technol., 20 (2011), 495–503. https://doi.org/10.1109/TCST.2011.2116022 doi: 10.1109/TCST.2011.2116022
|
| [32] |
Y. Q. Wang, G. F. Song, J. J. Zhao, J. Sun, G. M. Zhuang, Reliable mixed $H_\infty$ and passive control for networked control systems under adaptive event-triggered scheme with actuator faults and randomly occurring nonlinear perturbations, ISA Trans., 89 (2019), 45–57. https://doi.org/10.1016/j.isatra.2018.12.023 doi: 10.1016/j.isatra.2018.12.023
|
| [33] |
R. Sakthivel, S. Santra, K. Mathiyalagan, H. Y. Su, Robust reliable control design for networked control system with sampling conmmunication, Int. J. Control, 88 (2015), 2510–2522. https://doi.org/10.1080/00207179.2015.1048294 doi: 10.1080/00207179.2015.1048294
|
| [34] |
J. N. Li, Y. J. Pan, H. Y. Su, C. L. Wen, Stochastic reliable control of a class of networked control systems with actuator faults and input saturation, Int. J. Control Autom. Syst., 12 (2014), 564–571. https://doi.org/10.1007/s12555-013-0371-7 doi: 10.1007/s12555-013-0371-7
|
| [35] | W. Xue, P. Liu, S. Chen, Y. Huang, On extended state predictor observer based active disturbance rejection control for uncertain systems with sensor delay, in 2016 16th International Conference on Control, Automation and Systems (ICCAS), (2016), 1267–1271. https://doi.org/10.1109/ICCAS.2016.7832475 |
| [36] |
Ángel Cuenca, M. H. Zheng, M. Tomizuka, S. Sánchez, Non-uniform multi-rate estimator based periodic event-triggered control for resource saving, Inf. Sci., 459 (2018), 86–102. https://doi.org/10.1016/j.ins.2018.05.038 doi: 10.1016/j.ins.2018.05.038
|
| [37] |
W. Symens, H. van Brussel, J. Swevers, Gain-scheduling control of machine tools with varying structural flexibility, CIRP Ann., 53 (2004), 321–324. https://doi.org/10.1016/S0007-8506(07)60707-0 doi: 10.1016/S0007-8506(07)60707-0
|
| [38] |
C. Peng, T. C. Yang, Event-triggered communication and $H_\infty$ control co-design for networked control systems, Automatica, 49 (2013), 1326–1332. https://doi.org/10.1016/j.automatica.2013.01.038 doi: 10.1016/j.automatica.2013.01.038
|
| [39] |
Y. L. Wang, Q. L. Han, Modelling and controller design for discrete-time networked control systems with limited channels and data drift, Inf. Sci., 269 (2014), 332–348. https://doi.org/10.1016/j.ins.2013.12.041 doi: 10.1016/j.ins.2013.12.041
|
| [40] |
H. Zhang, J. Yang, C. Y. Su, T-S fuzzy-model-based robust $H_\infty$ design for networked control systems with uncertainties, IEEE Trans. Ind. Inf., 3 (2007), 289–301. https://doi.org/10.1109/TⅡ.2007.911895 doi: 10.1109/TⅡ.2007.911895
|
| [41] |
L. Jin, Y. He, L. Jiang, A novel integral inequality and its application to stability analysis of linear system with multiple time delays, Appl. Math. Lett., 124 (2022), 107648. https://doi.org/10.1016/j.aml.2021.107648 doi: 10.1016/j.aml.2021.107648
|
| [42] | X. L. Zhu, G. H. Yang, Jensen inequality approach to stability analysis of discrete-time systems with time-varying delay, in 2008 American Control Conference, (2008), 1644–1649. https://doi.org/10.1109/ACC.2008.4586727 |
| [43] |
A. Seuret, F. Gouaisbaut, Wirtinger-based integral inequality: application to time-delay systems, Automatica, 49 (2013), 2860–2866. https://doi.org/10.1016/j.automatica.2013.05.030 doi: 10.1016/j.automatica.2013.05.030
|
| [44] |
P. Park, W. I. Lee, S. Y. Lee, Auxiliary function-based integral/summation inequalities: application to continuous/discrete time-delay systems, Int. J. Control Autom. Syst., 14 (2016), 3–11. https://doi.org/10.1007/s12555-015-2002-y doi: 10.1007/s12555-015-2002-y
|









Figures(10) / Tables(1)
Xingyue Liu, Kaibo Shi, Yiqian Tang, Lin Tang, Youhua Wei, Yingjun Han. A novel adaptive event-triggered reliable $ H_\infty $ control approach for networked control systems with actuator faults[J]. Electronic Research Archive, 2023, 31(4): 1840-1862. doi: 10.3934/era.2023095







 DownLoad:
DownLoad: