We study emergent behaviors of the Lohe Hermitian sphere(LHS) model with a time-delay for a homogeneous and heterogeneous ensemble. The LHS model is a complex counterpart of the Lohe sphere(LS) aggregation model on the unit sphere in Euclidean space, and it describes the aggregation of particles on the unit Hermitian sphere in
Citation: Seung-Yeal Ha, Gyuyoung Hwang, Hansol Park. Emergent behaviors of Lohe Hermitian sphere particles under time-delayed interactions[J]. Networks and Heterogeneous Media, 2021, 16(3): 459-492. doi: 10.3934/nhm.2021013
We study emergent behaviors of the Lohe Hermitian sphere(LHS) model with a time-delay for a homogeneous and heterogeneous ensemble. The LHS model is a complex counterpart of the Lohe sphere(LS) aggregation model on the unit sphere in Euclidean space, and it describes the aggregation of particles on the unit Hermitian sphere in

| [1] | The Kuramoto model: A simple paradigm for synchronization phenomena. Rev. Mod. Phys. (2005) 77: 137-185. |
| [2] |
Vehicular traffic, crowds and swarms: From kinetic theory and multiscale methods to applications and research perspectives. Math. Models Methods Appl. Sci. (2019) 29: 1901-2005. 
|
| [3] | Systemes dequations differentielles d oscillations non lineaires. Rev. Math. Pures Appl. (1959) 4: 267-270. |
| [4] |
A quest toward a mathematical theory of the dynamics of swarms. Math. Models Methods Appl. Sci. (2017) 27: 745-770.
|
| [5] |
On the complete phase synchronization for the Kuramoto model in the mean-field limit. Commun. Math. Sci. (2015) 13: 1775-1786.
|
| [6] |
A matrix-valued Kuramoto model. J. Stat. Phys. (2020) 178: 595-624.
|
| [7] | Biology of synchronous flashing of fireflies. Nature (1966) 211: 562-564. |
| [8] |
J. Byeon, S. -Y. Ha and H. Park, Asymptotic interplay of states and adapted coupling gains in the Lohe Hermitian sphere model, Submitted. |
| [9] |
Time-delayed interactions and synchronization of identical Lohe oscillators. Quart. Appl. Math. (2016) 74: 297-319.
|
| [10] |
S. -H. Choi and S. -Y. Ha, Large-time dynamics of the asymptotic Lohe model with a small time-delay, J. Phys. A, 48 (2015), 425101 34 pp. |
| [11] |
Complete entrainment of Lohe oscillators under attractive and repulsive couplings. SIAM. J. Appl. Dyn. Syst. (2014) 13: 1417-1441.
|
| [12] |
On exponential synchronization of Kuramoto oscillators. IEEE Trans. Automatic Control (2009) 54: 353-357.
|
| [13] |
Quaternions in collective dynamics. Multiscale Model. Simul. (2018) 16: 28-77.
|
| [14] |
Synchronization and stability for quantum Kuramoto. J. Stat. Phys. (2019) 174: 160-187.
|
| [15] |
Synchronization analysis of Kuramoto oscillators. Commun. Math. Sci. (2013) 11: 465-480.
|
| [16] |
Synchronization in complex networks of phase oscillators: A survey. Automatica J. IFAC (2014) 50: 1539-1564.
|
| [17] |
On the critical coupling for Kuramoto oscillators. SIAM. J. Appl. Dyn. Syst. (2011) 10: 1070-1099.
|
| [18] |
S. -Y. Ha, D. Kim, D. Kim, H. Park and W. Shim, Emergent dynamics of the Lohe matrix ensemble on a network under time-delayed interactions, J. Math. Phys., 61 (2020), 012702. |
| [19] |
Collective synchronization of classical and quantum oscillators. EMS Surv. Math. Sci. (2016) 3: 209-267.
|
| [20] |
On the relaxation dynamics of Lohe oscillators on some Riemannian manifolds. J. Stat. Phys. (2018) 172: 1427-1478.
|
| [21] |
Emergent dynamics of Kuramoto oscillators with adaptive couplings: Conservation law and fast learning. SIAM J. Appl. Dyn. Syst. (2018) 17: 1560-1588.
|
| [22] |
Synchronization of Kuramoto oscillators with adaptive couplings. SIAM J. Appl. Dyn. Syst. (2016) 15: 162-194.
|
| [23] |
Emergent behaviors of Lohe tensor flocks. J. Stat. Phys. (2020) 178: 1268-1292.
|
| [24] |
From the Lohe tensor model to the Lohe Hermitian sphere model and emergent dynamics. SIAM J. Appl. Dyn. Syst. (2020) 19: 1312-1342.
|
| [25] |
J. Hale, Theory of Functional Differential Equations, 2nd ed., Springer-Verlag, New York-Heidelberg, 1977. |
| [26] |
V. Jaćimović and A. Crnkić, Low-dimensional dynamics in non-Abelian Kuramoto model on the 3-sphere, Chaos, 28 (2018), 083105. |
| [27] |
State-dependent dynamics of the Lohe matrix ensemble on the unitary group under the gradient flow. SIAM J. Appl. Dyn. Syst. (2020) 19: 1080-1123.
|
| [28] | (1993) Delay Differential Equations with Applications in Population Dynamics. Inc. Boston, MA: Academic Press. |
| [29] |
Y. Kuramoto, Self-Entrainment of a Population of Coupled Non-Linear Oscillators, International Symposium on Mathematical Problems in Mathematical Physics, Lecture Notes in Phys., Vol. 39, Springer, Berlin, 1975, 420-422. |
| [30] |
M. A. Lohe, Systems of matrix Riccati equations, linear fractional transformations, partial integrability and synchronization, J. Math. Phys., 60 (2019), 072701. |
| [31] |
M. A. Lohe, Quantum synchronization over quantum networks, J. Phys. A, 43 (2010), 465301. |
| [32] |
M. A. Lohe, Non-abelian Kuramoto models and synchronization, J. Phys. A, 42 (2009), 395101. |
| [33] |
Almost global consensus on the n-sphere. IEEE Trans. Automat. Control (2018) 63: 1664-1675.
|
| [34] |
C. S. Peskin, Mathematical Aspects of Heart Physiology, Courant Institute of Mathematical Sciences, New York University, New York, 1975. |
| [35] |
(2001) Synchronization: A Universal Concept in Nonlinear Sciences. Cambridge: Cambridge University Press.
|
| [36] |
From Kuramoto to Crawford: Exploring the Onset of Synchronization in Populations of Coupled Oscillators. Phys. D (2000) 143: 1-20.
|
| [37] |
A lifting method for analyzing distributed synchronization on the unit sphere. Automatica J. IFAC (2018) 96: 253-258.
|
| [38] |
A nonlocal continuum model for biological aggregation. Bull. Math. Biol. (2006) 68: 1601-1623.
|
| [39] |
Swarming patterns in a two-dimensional kinematic model for biological groups. SIAM J. Appl. Math. (2004) 65: 152-174.
|
| [40] | Collective motion. Phys. Rep. (2012) 517: 71-140. |
| [41] | Biological rhythms and the behavior of populations of coupled oscillators. J. Theor. Biol. (1967) 16: 15-42. |
| [42] |
A. T. Winfree, The Geometry of Biological Time, Springer-Verlag, Berlin-New York, 1980. |
| [43] |
Synchronization of Kuramoto model in a high-dimensional linear space. Phys. Lett. A (2013) 377: 2939-2943.
|
Figures(1)
Seung-Yeal Ha, Gyuyoung Hwang, Hansol Park. Emergent behaviors of Lohe Hermitian sphere particles under time-delayed interactions[J]. Networks and Heterogeneous Media, 2021, 16(3): 459-492. doi: 10.3934/nhm.2021013

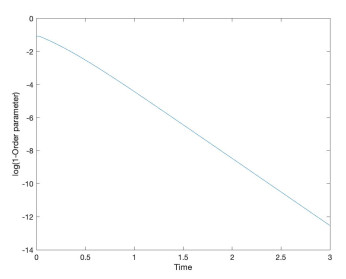
Exponential aggregation for






 DownLoad:
DownLoad: