The present work is to solve the nonlinear singular models using the framework of the stochastic computing approaches. The purpose of these investigations is not only focused to solve the singular models, but the solution of these models will be presented to the extended form of the delayed, prediction and pantograph differential models. The Gudermannian function is designed using the neural networks optimized through the global scheme "genetic algorithms (GA)", local method "sequential quadratic programming (SQP)" and the hybridization of GA-SQP. The comparison of the singular equations will be presented with the exact solutions along with the extended form of delayed, prediction and pantograph based on these singular models. Moreover, the neuron analysis will be provided to authenticate the efficiency and complexity of the designed approach. For the correctness and effectiveness of the proposed approach, the plots of absolute error will be drawn for the singular delayed, prediction and pantograph differential models. For the reliability and stability of the proposed method, the statistical performances "Theil inequality coefficient", "variance account for" and "mean absolute deviation'' are observed for multiple executions to solve singular delayed, prediction and pantograph differential models.
Citation: Zulqurnain Sabir, Hafiz Abdul Wahab, Juan L.G. Guirao. A novel design of Gudermannian function as a neural network for the singular nonlinear delayed, prediction and pantograph differential models[J]. Mathematical Biosciences and Engineering, 2022, 19(1): 663-687. doi: 10.3934/mbe.2022030
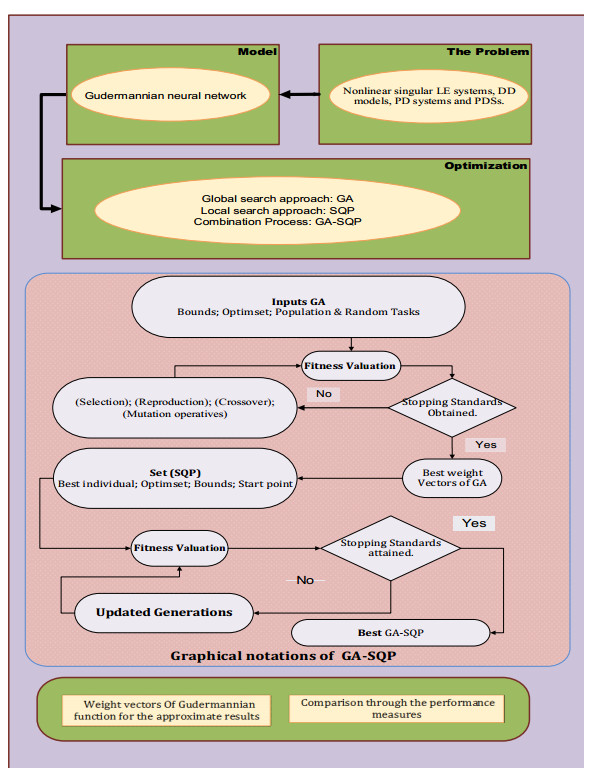
The present work is to solve the nonlinear singular models using the framework of the stochastic computing approaches. The purpose of these investigations is not only focused to solve the singular models, but the solution of these models will be presented to the extended form of the delayed, prediction and pantograph differential models. The Gudermannian function is designed using the neural networks optimized through the global scheme "genetic algorithms (GA)", local method "sequential quadratic programming (SQP)" and the hybridization of GA-SQP. The comparison of the singular equations will be presented with the exact solutions along with the extended form of delayed, prediction and pantograph based on these singular models. Moreover, the neuron analysis will be provided to authenticate the efficiency and complexity of the designed approach. For the correctness and effectiveness of the proposed approach, the plots of absolute error will be drawn for the singular delayed, prediction and pantograph differential models. For the reliability and stability of the proposed method, the statistical performances "Theil inequality coefficient", "variance account for" and "mean absolute deviation'' are observed for multiple executions to solve singular delayed, prediction and pantograph differential models.

| [1] |
H. J. Lane, On the theoretical temperature of the sun, under the hypothesis of a gaseous mass maintaining its volume by its internal heat and depending on the laws of gases as known to terrestrial experiment, Am. J. Sci., 148 (1870), 57–74. doi: 10.2475/ajs.s2-50.148.57. doi: 10.2475/ajs.s2-50.148.57

|
| [2] | R. Emden, Gaskugeln Teubner, Leipzig und Berlin, 1907. |
| [3] |
K. L. Wang, Variational principle and its fractal approximate solution for fractal Lane-Emden equation, Int. J. Numer. Methods Heat Fluid Flow, 2020 (2020). doi: 10.1108/HFF-09-2020-0552. doi: 10.1108/HFF-09-2020-0552
|
| [4] |
Z. Sabir, H. A. Wahab, M. Umar, M. G. Sakar, M. A. ZahoorRaja, Novel design of Morlet wavelet neural network for solving second order Lane–Emden equation, Math. Comput. Simul., 172 (2020), 1–14. doi: 10.1016/j.matcom.2020.01.005. doi: 10.1016/j.matcom.2020.01.005
|
| [5] |
W. Adel, Z. Sabir, Solving a new design of nonlinear second-order Lane–Emden pantograph delay differential model via Bernoulli collocation method, Eur. Phys. J. Plus, 135 (2020), 427. doi: 10.1140/epjp/s13360-020-00449-x. doi: 10.1140/epjp/s13360-020-00449-x
|
| [6] |
Z. Sabir, A. Amin, D. Pohl, J. L. G. Guirao, Intelligence computing approach for solving second order system of Emden–Fowler model, J. Intell Fuzzy Syst., 38 (2020), 7391–7406. doi: 10.3233/JIFS-179813. doi: 10.3233/JIFS-179813
|
| [7] |
Z. Sabir, M. G. Sakar, O. Saldir, Numerical investigations to design a novel model based on the fifth order system of Emden–Fowler equations, Theor. Appl. Mech. Lett., 10 (2020), 333–342. doi: 10.1016/j.taml.2020.01.049. doi: 10.1016/j.taml.2020.01.049
|
| [8] |
B. Dumitru, S. S. Samaneh, J. Amin, H. A. Jihad, New features of the fractional Euler-Lagrange equations for a physical system within non-singular derivative operator, Eur. Phys. J. Plus, 134 (2019), 181. doi: 10.1140/epjp/i2019-12561-x. doi: 10.1140/epjp/i2019-12561-x
|
| [9] |
T. Luo, Z. Xin, H. Zeng, Nonlinear asymptotic stability of the Lane-Emden solutions for the viscous gaseous star problem with degenerate density dependent viscosities, Commun. Math. Phys., 347 (2016), 657–702. doi: 10.1007/s00220-016-2753-1. doi: 10.1007/s00220-016-2753-1
|
| [10] |
R. Rach, J. S. Duan, A. M. Wazwaz, Solving coupled Lane-Emden boundary value problems in catalytic diffusion reactions by the Adomian decomposition method, J. Math. Chem., 52 (2014), 255–267. doi: 10.1007/s10910-013-0260-6. doi: 10.1007/s10910-013-0260-6
|
| [11] |
M. Ghergu, V. D. Radulescu, On a class of singular Gierer-Meinhardt systems arising in morphogenesis, Comptes Rendus Math., 344 (2007), 163–168. doi: 10.1016/j.crma.2006.12.008. doi: 10.1016/j.crma.2006.12.008
|
| [12] |
M. Dehghanet, F. Shakeri, Solution of an integro-differential equation arising in oscillating magnetic fields using He's homotopy perturbation method, Prog. Electromagn. Res., 78 (2008), 361–376. doi: 10.2528/PIER07090403. doi: 10.2528/PIER07090403
|
| [13] |
A. H. Bhrawy, A. S. Alofi, R. A. van Gorder, An efficient collocation method for a class of boundary value problems arising in mathematical physics and geometry, Abstr. Appl. Anal., 2014 (2014). doi: https://doi.org/10.1155/2014/425648. doi: 10.1155/2014/425648
|
| [14] |
D. Flockerzi, K. Sundmacher, On coupled Lane-Emden equations arising in dusty fluid models, J. Phys. Conf. Ser., 268 (2011), 012006. doi: 10.1088/1742-6596/268/1/012006. doi: 10.1088/1742-6596/268/1/012006
|
| [15] |
V. Radulescuet, D. D. Repovs, Combined effects in nonlinear problems arising in the study of an-isotropic continuous media, Nonlinear Anal. Theory Methods Appl., 75 (2012), 1524–1530. doi: 10.1016/j.na.2011.01.037. doi: 10.1016/j.na.2011.01.037
|
| [16] |
S. Liao, A new analytic algorithm of Lane–Emden type equations, Appl. Math. Comput., 142 (2003), 1–16. doi: 10.1016/S0096-3003(02)00943-8. doi: 10.1016/S0096-3003(02)00943-8
|
| [17] |
V. B. Mandelzweig, F. Tabakin, Quasilinearization approach to nonlinear problems in physics with application to nonlinear ODEs, Comput. Phys. Commun., 141 (2001), 268–281. doi: 10.1016/S0010-4655(01)00415-5. doi: 10.1016/S0010-4655(01)00415-5
|
| [18] | Y. Kuang, Delay differential equations: with applications in population dynamics, Math. Sci. Eng., 191 (1993). |
| [19] |
W. Li, B. Chen, C. Meng, W. Fang, Y. Xiao, X. Li, et al., Ultrafast all-optical graphene modulator, Nano Lett., 14 (2014), 955–959. doi: 10.1021/nl404356t. doi: 10.1021/nl404356t
|
| [20] | D. S. Li, M. Z. Liu, Exact solution's property of multi pantograph delay differential equation, J. Harbin Inst. Technol., 32 (2000), 1–3. |
| [21] | S. I. Niculescu, Delay Effects on Stability: A Robust Control Approach, Springer Science & Business Media, (2001). doi: 10.1007/1-84628-553-4. |
| [22] |
E. Beretta, Y. Kaung, Geometric stability switch criteria in delay differential systems with delay dependent parameters, SIAM J. Math. Anal., 33 (2002), 1144–1165. doi: 10.1137/S0036141000376086. doi: 10.1137/S0036141000376086
|
| [23] | J. E. Forde, Delay Differential Equation Models in Mathematical Biology, University of Michigan, (2005). |
| [24] |
M. W. Frazier, Background: Complex Numbers and Linear Algebra, Introd. Wavelets Linear Algebra, 1999 (1999), 7–100. doi: 10.1007/0-387-22653-2_2. doi: 10.1007/0-387-22653-2_2
|
| [25] | Y. M. Rangkuti, M. S. M. Noorani, The exact solution of delay differential equations using coupling variational iteration with Taylor series and small term, Bull. Math., 4 (2012), 1–15. |
| [26] | S. C. Chapra, Applied numerical methods, Columbus McGraw-Hill, (2012). |
| [27] |
Z. Sabir, D. Baleanu, M. A. Z. Raja, J. L. G. Guirao, Design of neuro-swarming heuristic solver for multi-pantograph singular delay differential equation, Fractals, 29 (2021), 2140022. doi: 10.1142/S0218348X21400223. doi: 10.1142/S0218348X21400223
|
| [28] |
J. L. G. Guirao, Z. Sabir, T. Saeed, Design and numerical solutions of a novel third-order nonlinear Emden–Fowler delay differential model, Math. Prob. Eng., 2020 (2020). doi: 10.1155/2020/7359242. doi: 10.1155/2020/7359242
|
| [29] |
Z. Sabir, J. L. G. Guirao, T. Saeed, Solving a novel designed second order nonlinear Lane–Emden delay differential model using the heuristic techniques, Appl. Soft Comput., 102 (2021) 107105. doi: 10.1016/j.asoc.2021.107105. doi: 10.1016/j.asoc.2021.107105
|
| [30] |
Z. Sabir, J. L. G. Guirao, T. Saeed, F. Erdogan, Design of a novel second-order prediction differential model solved by using adams and explicit Runge–Kutta numerical methods, Math. Prob. Eng., 2020 (2020). doi: 10.1155/2020/9704968. doi: 10.1155/2020/9704968
|
| [31] |
Z. Sabir, M. A. Z. Raja, H. A. Wahab, M. Shoaib, J. F. Gomes, Integrated neuro-evolution heuristic with sequential quadratic programming for second-order prediction differential models, Numer. Methods Partial Differ. Equation, 2020 (2020). doi: 10.1002/num.22692. doi: 10.1002/num.22692
|
| [32] | D. S. Li, M. Z. Liu, Exact solution properties of a multi-pantograph delay differential equation, J. Harbin Inst. Technol., 32 (2000), 1–3. |
| [33] |
Z. Sabir, M. A. Z. Raja, H. A. Wahab, G. C. Altamirano, Integrated intelligence of neuro-evolution with sequential quadratic programming for second-order Lane–Emden pantograph models, Math. Comput. Simul., 188 (2021), 87–101. doi: 10.1016/j.matcom.2021.03.036. doi: 10.1016/j.matcom.2021.03.036
|
| [34] |
T. Zhao, Global periodic-solutions for a differential delay system modeling a microbial population in the chemostat, J. Math. Anal. Appl., 193 (1995), 329–352. doi: 10.1006/jmaa.1995.1239. doi: 10.1006/jmaa.1995.1239
|
| [35] |
Z. Sabir, M. A. Z. Raja, D. N. Le, A. A. Aly, A neuro-swarming intelligent heuristic for second-order nonlinear Lane–Emden multi-pantograph delay differential system, Complex Intell. Syst., 2021 (2021), 1–14. doi: 10.1007/s40747-021-00389-8. doi: 10.1007/s40747-021-00389-8
|
| [36] |
K. Nisar, Z. Sabir, M. A. Z. Raja, A. A. A. Ibrahim, F. Erdogan, M. R. Haque, Design of morlet wavelet neural network for solving a class of singular pantograph nonlinear differential models, IEEE Access, 9 (2021), 77845–77862. doi: 10.1109/ACCESS.2021.3072952. doi: 10.1109/ACCESS.2021.3072952
|
| [37] |
M. Z. Liu, D. Li, Properties of analytic solution and numerical solution of multi-pantograph equation, Appl. Math. Comput., 155 (2004), 853–871.doi: 10.1016/j.amc.2003.07.017. doi: 10.1016/j.amc.2003.07.017
|
| [38] |
M. Sezer, S. Yalcinbas, N. Sahin, Approximate solution of multi-pantograph equation with variable coefficients, J. Comput. Appl. Math., 214 (2008), 406–416. Doi: 10.1016/j.cam.2007.03.024. doi: 10.1016/j.cam.2007.03.024
|
| [39] |
M. A. Koroma, C. Zhan, A. F. Kamara, A. B. Sesay, Laplace decomposition approximation solution for a system of multi-pantograph equations, Int. J. Math. Comput. Sci. Eng., 7 (2013), 39–44. doi: 10.5281/zenodo.1087105. doi: 10.5281/zenodo.1087105
|
| [40] |
Y. Keskin, A. Kurnaz, M. Kiris, G. Oturanc, Approximate solutions of generalized pantograph equations by the differential transform method, Int. J. Nonlinear Sci. Numer. Simul., 8 (2007), 159–164. doi: 10.1515/IJNSNS.2007.8.2.159. doi: 10.1515/IJNSNS.2007.8.2.159
|
| [41] | N. Abazari, R. Abazari, Solution of nonlinear second-order pantograph equations via differential transformation method, Proc. World Acad. Sci, Eng. Technol., 58 (2009), 1052–1056. |
| [42] |
M. Umar, Z. Sabir, F. Amin, L. G. Guirao, M. A. Z. Raja, Stochastic numerical technique for solving HIV infection model of CD4+ T cells, Eur. Phys. J. Plus, 135 (2020), 403. doi: 10.1140/epjp/s13360-020-00417-5. doi: 10.1140/epjp/s13360-020-00417-5
|
| [43] |
M. Umar, Z. Sabir, M. A. Z. Raja, J. G. Gomes-Aguilar, Neuro-swarm intelligent computing paradigm for nonlinear HIV infection model with CD4+ T-cells, Math. Comput. Simul., 188 (2021), 241–253. doi: 10.1016/j.matcom.2021.04.008. doi: 10.1016/j.matcom.2021.04.008
|
| [44] |
Y. G. Sánchez, M. Umar, Z. Sabir, J. L. G. Guirao, M. A. Z. Raja, Solving a class of biological HIV infection model of latently infected cells using heuristic approach, Discrete. Contin. Dyn. Syst. S., 14 (2018). doi: 10.3934/dcdss.2020431. doi: 10.3934/dcdss.2020431
|
| [45] |
M. Umar, Z. Sabir, M. A. Z. Raja, H. M. Backonus, S. W. Yao, E. Iihan, A novel study of Morlet neural networks to solve the nonlinear HIV infection system of latently infected cells, Results Phys., 25 (2021), 104235. doi: 10.1016/j.rinp.2021.104235. doi: 10.1016/j.rinp.2021.104235
|
| [46] |
Z. Sabir, K. Nisar, M. A. Z. Raja, A. A. A Ibrahim, Design of Morlet wavelet neural network for solving the higher order singular nonlinear differential equations, Alex. Eng. J., 60 (2021), 5935–5947. doi: 10.1016/j.aej.2021.04.001. doi: 10.1016/j.aej.2021.04.001
|
| [47] |
Z. Sabir, S. Saoud, M. A. Z. Raja, H. A. Wahab, A. Arbi, Heuristic computing technique for numerical solutions of nonlinear fourth order Emden–Fowler equation, Math. Comput. Simul., 178 (2020), 534–548. doi: 10.1016/j.matcom.2020.06.021. doi: 10.1016/j.matcom.2020.06.021
|
| [48] |
Z. Sabir, M. A. Z. Raja, J. L. G. Guirao, M. Shoaib, Integrated intelligent computing with neuro-swarming solver for multi-singular fourth-order nonlinear Emden–Fowler equation, Compt. Appl. Math., 39 (2020), 1–18. doi: 10.1007/s40314-020-01330-4. doi: 10.1007/s40314-020-01330-4
|
| [49] |
M. Umar, M. A. Z. Raja, Z. Sabir, A. S. Alwabli, M. Shoaib, A stochastic computational intelligent solver for numerical treatment of mosquito dispersal model in a heterogeneous environment, Eur. Phys. J. Plus, 135 (2020), 1–23. doi: 10.1140/epjp/s13360-020-00557-8. doi: 10.1140/epjp/s13360-020-00557-8
|
| [50] |
M. A. Z. Raja, M. Umar, Z. Sabir, J. A. Khan, D. Baleanu, A new stochastic computing paradigm for the dynamics of nonlinear singular heat conduction model of the human head, Eur. Phys. J. Plus, 133 (2018), 1–21. doi: 10.1140/epjp/i2018-12153-4. doi: 10.1140/epjp/i2018-12153-4
|
| [51] |
M. A. Z. Raja, J. Mehmood, Z. Sabir, A. K. Naseb, M. A. Manzar, Numerical solution of doubly singular nonlinear systems using neural networks-based integrated intelligent computing, Neural Compt. Appl., 31 (2019), 793–812. doi: 10.1007/s00521-017-3110-9. doi: 10.1007/s00521-017-3110-9
|
| [52] |
Z. Sabir, M. A. Z. Raja, M. Shoaib, J. F. G. Gomez-Aguilar, FMNEICS: fractional Meyer neuro-evolution-based intelligent computing solver for doubly singular multi-fractional order Lane-Emden system, Compt. Appl. Math., 39 (2020), 1–18. doi: 10.1007/s40314-020-01350-0. doi: 10.1007/s40314-020-01350-0
|
| [53] |
M. Umar, Z. Sabir, M. A. Z. Raja, Y. G. Sanchez, A stochastic numerical computing heuristic of SIR nonlinear model based on dengue fever, Results Phys., 19 (2020), 103585. doi: 10.1016/j.rinp.2020.103585. doi: 10.1016/j.rinp.2020.103585
|
| [54] | S. Forrest, M. Mitchell, Relative building-block fitness and the building block hypothesis, in Foundations of Genetic Algorithms, (1993), 109–126. doi: 10.1016/B978-0-08-094832-4.50013-1. |
| [55] |
J. C. Lee, W. M. Lin, G. C. Liao, T. P. Tsao, Quantum genetic algorithm for dynamic economic dispatch with valve-point effects and including wind power system, Int. J. Electr. Power Energy Syst., 33 (2011), 189–197. doi: 10.1016/j.ijepes.2010.08.014. doi: 10.1016/j.ijepes.2010.08.014
|
| [56] |
G. C. Dandy, A. R. Simpson, L. J. Murphy, An improved genetic algorithm for pipe network optimization, Water Resour. Res., 32 (1996), 449–458. doi: 10.1029/95WR02917. doi: 10.1029/95WR02917
|
| [57] |
M. S. Hoque, M. A. Mukit, M. A. N. Bikas, An implementation of intrusion detection system using genetic algorithm, Int. J. Network Secur. Appl., 4 (2012), 109–120. doi: 10.5121/ijnsa.2012.4208. doi: 10.5121/ijnsa.2012.4208
|
| [58] |
A. Arabali, M. Ghofrani, M. Etezadi-Amoli, M. S. Fadal, Y. Baghzouz, Genetic-algorithm-based optimization approach for energy management, IEEE Trans. Power Deliv., 28 (2013), 162–170. doi: 10.1109/TPWRD.2012.2219598. doi: 10.1109/TPWRD.2012.2219598
|
| [59] |
X. Wen, Q. Xia, Y. Zhao, An effective genetic algorithm for circularity error unified evaluation, Int. J. Mach. Tools Manuf., 46 (2006), 1770–1777. doi: 10.1016/j.ijmachtools.2005.11.015. doi: 10.1016/j.ijmachtools.2005.11.015
|
| [60] |
K. Gai, L. Qiu, H. Zhao, M. Qiu, Cost-aware multimedia data allocation for heterogeneous memory using genetic algorithm in cloud computing, IEEE Trans. Cloud Comput., 8 (2020), 1212–1222. doi: 10.1109/TCC.2016.2594172. doi: 10.1109/TCC.2016.2594172
|
| [61] |
S. Erenturk, K. Erenturk, Comparison of genetic algorithm and neural network approaches for the drying process of carrot, J. Food Eng., 78 (2007), 905–912. doi: 10.1016/j.jfoodeng.2005.11.031. doi: 10.1016/j.jfoodeng.2005.11.031
|
| [62] |
E. Hopper, B. Turton, A genetic algorithm for a 2D industrial packing problem, Comput. Ind. Eng., 37 (1999), 375–378. doi: 10.1016/S0360-8352(99)00097-2. doi: 10.1016/S0360-8352(99)00097-2
|
| [63] |
S. Jacob, R. Banerjee, Modeling and optimization of anaerobic codigestion of pota-to waste and aquatic weed by response surface methodology and artificial neural network coupled genetic algorithm, Bioresourc. Technol., 214 (2016), 386–395. doi: 10.1016/j.biortech.2016.04.06. doi: 10.1016/j.biortech.2016.04.06
|
| [64] |
A. Kelman, F. Borrelli, Bilinear model predictive control of a HVAC system using sequential quadratic programming, IFAC Proc. Volumes, 44 (2011), 9869–9874. doi: 10.3182/20110828-6-IT-1002.03811. doi: 10.3182/20110828-6-IT-1002.03811
|
| [65] |
M. Fesanghary, M. Mahdavi, M. M. Jolandan, Y. Alizadeh, Hybridizing harmony search algorithm with sequential quadratic programming for engineering optimization problems, Comput. Methods Appl. Mech. Eng., 197 (2008), 3080–3091. doi: 10.1016/j.cma.2008.02.006. doi: 10.1016/j.cma.2008.02.006
|
| [66] |
J. Sun, A. Reddy, Optimal control of building HVAC & R systems using complete simulation-based sequential quadratic programming (CSB-SQP), Build. Environ., 40 (2005), 657–669. doi: 10.1016/j.buildenv.2004.08.011 doi: 10.1016/j.buildenv.2004.08.011
|
| [67] |
A. Noorbakhsh, E. Khamehchi, Field production optimization using sequential quadratic programming (SQP) algorithm in ESP-implemented wells, a comparison approach, J. Pet. Sci. Technol., 10 (2020), 54–63.doi: 10.22078/JPST.2020.3962.1629. doi: 10.22078/JPST.2020.3962.1629
|
| [68] |
R. Hult, M. Zanon, G. Frison, S. Gros, P. Falcone, Experimental validation of a semi-distributed sequential quadratic programming method for optimal coordination of automated vehicles at intersections, Optim. Control Appl. Methods, 41 (2020), 1068–1096. doi: 10.1002/oca.2592. doi: 10.1002/oca.2592
|
| [69] |
R. N. Gul, A. Ahmed, S. Fayyaz, M. K. Sattar, S. Sadam ul Haq, A hybrid flower pollination algorithm with sequential quadratic programming technique for solving dynamic combined economic emission dispatch problem, Mehran Univ. Res. J. Eng. Technol., 40 (2021), 371–382. doi: 10.22581/muet1982.2102.11. doi: 10.22581/muet1982.2102.11
|
| [70] |
H. Tian, K. Wang, B. Yu, C. Song, K. Jermsittiparset, Hybrid improved Sparrow Search Algorithm and sequential quadratic programming for solving the cost minimization of a hybrid photovoltaic, diesel generator, and battery energy storage system, Energy Sources Part A, 2021 (2021), 1–17. doi: 10.1080/15567036.2021.1905111. doi: 10.1080/15567036.2021.1905111
|
| [71] |
E. IIhan, I. O. Kiymaz, A generalization of truncated M-fractional derivative and applications to fractional differential equations, Appl. Math. Nonlinear Sci., 5 (2020), 171–188. doi: 10.2478/amns.2020.1.00016. doi: 10.2478/amns.2020.1.00016
|
| [72] |
H. M. Backonus, H. Bulut, T. A. Sulaiman, New complex hyperbolic structures to the lonngren-wave equation by using sine-gordon expansion method, Appl. Math. Nonlinear Sci., 4 (2019), 129–138. doi: 10.2478/AMNS.2019.1.00013. doi: 10.2478/AMNS.2019.1.00013
|
| [73] |
K. Vajravelu, S. Sreenadh, R. Saravana, Influence of velocity slip and temperature jump conditions on the peristaltic flow of a Jeffrey fluid in contact with a Newtonian fluid, Appl. Math. Nonlinear Sci., 2 (2017), 429–442. doi: 10.21042/AMNS.2017.2.00034. doi: 10.21042/AMNS.2017.2.00034
|
| [74] |
M. Selvi, L. Rajendran, Application of modified wavelet and homotopy perturbation methods to nonlinear oscillation problems, Appl. Math. Nonlinear Sci., 4 (2019), 351–364. doi: 10.2478/AMNS.2019.2.00030. doi: 10.2478/AMNS.2019.2.00030
|
| [75] |
M. E. Iglesias Martínez, J. A. Antonino Daviu, P. Fernández de Córdoba, C. Alberto, Higher-order spectral analysis of stray flux signals for faults detection in induction motors, Appl. Math. Nonlinear Sci., 5 (2020), 1–14. doi: 10.2478/amns.2020.1.00032 doi: 10.2478/amns.2020.1.00032
|
| [76] |
D. Kaur, P. Agarwwal, M. Rakshit, M. Chand, Fractional calculus involving (p, q)-Mathieu type series, Appl. Math. Nonlinear Sci., 5 (2020), 15–34. doi: 10.2478/amns.2020.2.00011. doi: 10.2478/amns.2020.2.00011
|
| [77] |
K. A. Touchent, Z. Hammouch, T. Mekkaoui, A modified invariant subspace method for solving partial differential equations with non-singular kernel fractional derivatives, Appl. Math. Nonlinear Sci., 5 (2020), 35–48. doi: 10.2478/amns.2020.2.00012. doi: 10.2478/amns.2020.2.00012
|
| [78] |
M. Onal, A. Esen, A Crank-Nicolson approximation for the time fractional Burgers equation, Appl. Math. Nonlinear Sci., 5 (2020), 177–184. doi: 10.2478/amns.2020.2.00023. doi: 10.2478/amns.2020.2.00023
|
| [79] |
B. Günay, P. Agarwal, J. L. Guirao, S. Momani, A fractional approach to a computational eco-epidemiological model with holling type-Ⅱ functional response, Symmetry, 13 (2021), 1159. doi: 10.3390/sym13071159. doi: 10.3390/sym13071159
|
| [80] |
S. Salahshour, A. Ahmadian, N. Senu, D. Baleanu, P. Agarwal, On analytical solutions of the fractional differential equation with uncertainty: application to the basset problem, Entropy, 17 (2015), 885–902. doi: 10.3390/e17020885. doi: 10.3390/e17020885
|
| [81] |
B. Wang, H. Jahanshahi, C. Volos, S. Bekiros, M. A. Khan, P. Agarwal, et al., New RBF neural network-based fault-tolerant active control for fractional time-delayed systems, Electronics, 10 (2021), 1501. doi: 10.3390/electronics10121501. doi: 10.3390/electronics10121501
|
| [82] |
S. Rezapour, S. Etemad, B. Tellab, P. Agarwal, J. L. G. Guirao, Numerical solutions caused by DGJIM and ADM methods for multi-term fractional BVP involving the generalized ψ-RL-operators, Symmetry, 13 (2021), 532. doi: 10.3390/sym13040532. doi: 10.3390/sym13040532
|
| [83] |
G. Rajchakit, R. Sriraman, N. Boonsatit, P. Hammachukiattikul, C. P. Lim, P. Agarwal, Global exponential stability of Clifford-valued neural networks with time-varying delays and impulsive effects, Adv. Differ. Equation, 208 (2021), 1–21. doi: 10.1186/s13662-021-03367-z. doi: 10.1186/s13662-021-03367-z
|
| [84] |
N. Boonsatit, G. Rajchakit, R. Sriraman, C. P. Lim, P. Agarwal, Finite-/fixed-time synchronization of delayed Clifford-valued recurrent neural networks, Adv. Differ. Equation, 2021 (2021), 1–25. doi: 10.1186/s13662-021-03438-1. doi: 10.1186/s13662-021-03438-1
|
| [85] |
G. Rajchakit, R. Sriraman, N. Boonsatit, P. Hammachukiattikul, C. P. Lim, P. Agarwal, Exponential stability in the Lagrange sense for Clifford-valued recurrent neural networks with time delays, Adv. Differ. Equation, 256 (2021), 1–21. doi: 10.1186/s13662-021-03415-8. doi: 10.1186/s13662-021-03415-8
|









Figures(10) / Tables(4)

Zulqurnain Sabir, Hafiz Abdul Wahab, Juan L.G. Guirao. A novel design of Gudermannian function as a neural network for the singular nonlinear delayed, prediction and pantograph differential models[J]. Mathematical Biosciences and Engineering, 2022, 19(1): 663-687. doi: 10.3934/mbe.2022030







 DownLoad:
DownLoad: