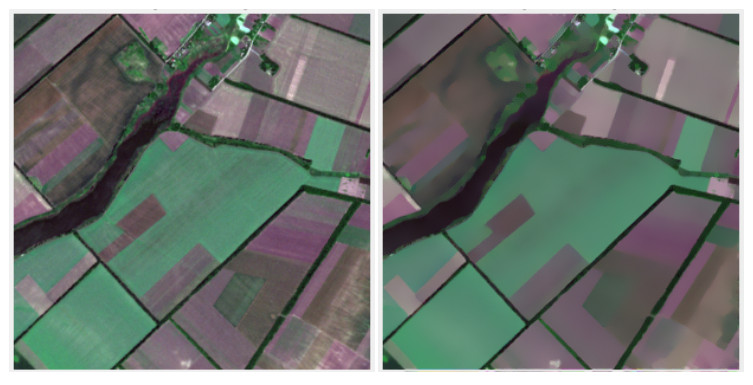
Mostly motivated by the crop field classification problem and the automated computational methodology for extracting agricultural crop fields from satellite data, we proposed in a bounded variation (BV) space a new approach to the piecewise smooth approximation of the slope-based vegetation indices and the closely related crop field segmentation problem of multi-band satellite images.
Citation: Ciro D'Apice, Peter Kogut, Rosanna Manzo. On generalized active contour model in the anisotropic BV space and its application to satellite remote sensing of agricultural territory[J]. Networks and Heterogeneous Media, 2025, 20(1): 113-142. doi: 10.3934/nhm.2025008
Mostly motivated by the crop field classification problem and the automated computational methodology for extracting agricultural crop fields from satellite data, we proposed in a bounded variation (BV) space a new approach to the piecewise smooth approximation of the slope-based vegetation indices and the closely related crop field segmentation problem of multi-band satellite images.

| [1] | R. Boesch, Z. Wang, Segmentation optimization for aerial images with spacial constraints, in The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 37 (2008), 285–289. |
| [2] |
Y. Chen, Q. Chen, C. Jing, Multi-resolution segmentation parameters optimization and evaluation for VHR remote sensing image based on meanNSQI and discrepancy measure, J. Spat. Sci., 66 (2019), 253–278. https://doi.org/10.1080/14498596.2019.1615011 doi: 10.1080/14498596.2019.1615011

|
| [3] |
P. Xiao, X. Zhang, H. Zhang, R. Hu, X. Feng, Multiscale optimized segmentation of urban green cover in high resolution remote sensing image, Remote Sens., 10 (2018), 1813. https://doi.org/10.3390/rs10111813 doi: 10.3390/rs10111813
|
| [4] |
J. Xue, B. Su, Significant remote sensing Vegetation Indices: A review of developments and applications, J. Sensors, 2017 (2017), 1353691. https://doi.org/10.1155/2017/1353691 doi: 10.1155/2017/1353691
|
| [5] |
D. Mumford, J. Shah, Optimal approximation by piecewise smooth functions and associated variational problems, Commun. Pure. Appl. Math., 42 (1989), 577–685. https://doi.org/10.1002/cpa.3160420503 doi: 10.1002/cpa.3160420503
|
| [6] |
L. Alvarez, P. L. Lions, J. M. Morel, Image selective smoothing and edge detection by nonlinear diffusion. Ⅱ, SIAM J. Numer. Anal., 29 (1992), 845–866. https://doi.org/10.1137/0729052 doi: 10.1137/0729052
|
| [7] |
L. Alvarez, F. Guichard, P. L. Lions, J. M. Morel, Axioms and fundamental equations of image processing, Arch. Ration. Mech. Anal., 123 (1993), 199–257. https://doi.org/10.1007/BF00375127 doi: 10.1007/BF00375127
|
| [8] |
F. Catté, T. Coll, P. L. Lions, J. M. Morel, Image selective smoothing and edge detection by nonlinear diffusion. Ⅰ, SIAM J. Numer. Anal., 29 (1992), 182–193. https://doi.org/10.1137/0729012 doi: 10.1137/0729012
|
| [9] |
V. Caselles, R. Kimmel, G. Sapiro, Geodesic active contours, Int. J. Comput. Vision, 22 (1997), 61–79. https://doi.org/10.1023/A:1007979827043 doi: 10.1023/A:1007979827043
|
| [10] |
T. Chan, L. Vese, Active contours without edges, IEEE Trans. Image Process., 10 (2001), 266–277. https://doi.org/10.1109/83.902291 doi: 10.1109/83.902291
|
| [11] |
D. J. Mulla, Twenty five years of remote sensing in precision agriculture: Key advances and remaining knowledge gaps, Biosyst. Eng., 114 (2013), 358–371. https://doi.org/10.1016/j.biosystemseng.2012.08.009 doi: 10.1016/j.biosystemseng.2012.08.009
|
| [12] |
B. Han, Y. Wu, Active contour model for inhomogeneous image segmentation based on Jeffreys divergence, Pattern Recognit., 107 (2020), 107520. http://dx.doi.org/10.1016/j.patcog.2020.107520 doi: 10.1016/j.patcog.2020.107520
|
| [13] |
H. Jeffreys, An invariant form for the prior probability in estimation problems, Proc. R. Soc. Lond., Ser. A, Math. Phys. Sci., 186 (1946), 453–461. https://doi.org/10.1098/rspa.1946.0056 doi: 10.1098/rspa.1946.0056
|
| [14] |
C. Yang, G. Weng, Y. Chen, Active contour model based on local Kullback–Leibler divergence for fast image segmentation, Eng. Appl. Artif. Intell., 123 (2023), 106472. https://doi.org/10.1016/j.engappai.2023.106472 doi: 10.1016/j.engappai.2023.106472
|
| [15] | C. Samson, L. Blanc-Féraud, G. Aubert, J. Zerubia, Multiphase Evolution and Variational Image Classification, INRIA Sophia Antipolis, 1999. |
| [16] | H. Attouch, G. Buttazzo, G. Michaille, Variational Analysis in Sobolev and $BV$ Spaces: Applications to PDEs and Optimization, Philadelphia: SIAM, 2006. |
| [17] | L. C. Evans, Weak convergence methods for nonlinear partial differential equations, Washington, DC: American Mathematical Society, 1990. |
| [18] | L. Ambrosio, N. Fusco, D. Pallara, Functions of Bounded Variation and Free Discontinuity Problems, New York: Oxford University Press, 2000. |
| [19] | E. Giusti, Minimal Surfaces and Functions of Bounded Variation, Boston: Birkhäuser, 1984. https://doi.org/10.1007/978-1-4684-9486-0 |
| [20] | L. C. Evans, R. E. Gariepy, Measure Theory and Fine Properties of Functions, New York: Routledge, 1992. https://doi.org/10.1201/9780203747940 |
| [21] | R. Caccioppoli, Misura e integrazione sugli insiemi dimensionalmente orientali Ⅰ.Ⅱ, Atti Accad. Naz. Lincei. Rend. Cl. Sci. Fis. Mat. Nat., 12 (1952), 3–11. |
| [22] | M. Grasmair, A Coarea Formula for Anisotropic Total Variation Regularisation, Universität Wien, 2010. |
| [23] | L. Rotem, The anisotropic total variation and surface area measures, In: Geometric Aspects of Functional Analysis, Cham: Springer, 2327 (2023), 297–312. https://doi.org/10.1007/978-3-031-26300-2_11 |
| [24] |
L. Bungert, D. A. Coomes, M. J. Ehrhardt, J. Rasch, R. Reisenhofer, R. C. B. Schönlieb, Blind image fusion for hyperspectral imaging with the directional total variation, Inverse Probl., 34 (2018), 044003. https://doi.org/10.1088/1361-6420/aaaf63 doi: 10.1088/1361-6420/aaaf63
|
| [25] | L. Bar, T. F. Chan, G. Chung, M. Jung, N. Kiryati, R. Mohieddine, N. Socheen, L. A. Vese, Mumford and Shah model and its applications to image segmentation and image restoration, In: Handbook of Mathematical Methods in Imaging, New York: Springer, 2011, 1097–1157. https://doi.org/10.1007/978-0-387-92920-0_25 |
| [26] | T. Chan, L. Vese, A level set algorithm for minimizing the Mumford-Shah functional in image processing, in Proceedings IEEE Workshop on Variational and Level Set Methods in Computer Vision, 2001,161–168. https://doi.org/10.1109/VLSM.2001.938895 |
| [27] | G. Dal Maso, An Introduction to $\Gamma$-Convergence, Boston: Birkhäuser Verlag, 1993. https://doi.org/10.1007/978-1-4612-0327-8 |
| [28] | P. I. Kogut, O. P. Kupenko, Approximation Methods in Optimization of Nonlinear Systems, Berlin, Boston: De Gruyter, 2019. https://doi.org/10.1515/9783110668520 |
| [29] | P. I. Kogut, G. Leugering, Optimal control problems for partial differential equations on reticulated domains. Approximation and Asymptotic Analysis, Boston: Birkhäuser Verlag, 2011. https://doi.org/10.1007/978-0-8176-8149-4 |
| [30] |
C. D'Apice, P. I. Kogut, O. Kupenko, R. Manzo, On a variational problem with a nonstandard growth functional and its applications to image processing, J. Math. Imaging Vision, 65 (2023), 472–491. https://doi.org/10.1007/s10851-022-01131-w doi: 10.1007/s10851-022-01131-w
|



Figures(4)
Ciro D'Apice, Peter Kogut, Rosanna Manzo. On generalized active contour model in the anisotropic BV space and its application to satellite remote sensing of agricultural territory[J]. Networks and Heterogeneous Media, 2025, 20(1): 113-142. doi: 10.3934/nhm.2025008







 DownLoad:
DownLoad: