A strongly symmetric stress approximation is proposed for the Brinkman equations with mixed boundary conditions. The resulting formulation solves for the Cauchy stress using a symmetric interior penalty discontinuous Galerkin method. Pressure and velocity are readily post-processed from stress, and a second post-process is shown to produce exactly divergence-free discrete velocities. We demonstrate the stability of the method with respect to a DG-energy norm and obtain error estimates that are explicit with respect to the coefficients of the problem. We derive optimal rates of convergence for the stress and for the post-processed variables. Moreover, under appropriate assumptions on the mesh, we prove optimal $ L^2 $-error estimates for the stress. Finally, we provide numerical examples in 2D and 3D.
Citation: Salim Meddahi, Ricardo Ruiz-Baier. A new DG method for a pure–stress formulation of the Brinkman problem with strong symmetry[J]. Networks and Heterogeneous Media, 2022, 17(6): 893-916. doi: 10.3934/nhm.2022031
A strongly symmetric stress approximation is proposed for the Brinkman equations with mixed boundary conditions. The resulting formulation solves for the Cauchy stress using a symmetric interior penalty discontinuous Galerkin method. Pressure and velocity are readily post-processed from stress, and a second post-process is shown to produce exactly divergence-free discrete velocities. We demonstrate the stability of the method with respect to a DG-energy norm and obtain error estimates that are explicit with respect to the coefficients of the problem. We derive optimal rates of convergence for the stress and for the post-processed variables. Moreover, under appropriate assumptions on the mesh, we prove optimal $ L^2 $-error estimates for the stress. Finally, we provide numerical examples in 2D and 3D.

| [1] |
J. E. Aarnes, T. Gimse and K.-A. Lie, An introduction to the numerics of flow in porous media using Matlab, in Geometric Modelling, Numerical Simulation, and Optimization: Applied Mathematics at SINTEF, G. Hasle, K.-A. Lie, and E. Quak, eds., Springer Berlin Heidelberg, Berlin, Heidelberg, 2007, 265-306. |
| [2] | The FEniCS project version 1.5. Arch. Numer. Softw. (2015) 3: 9-23. |
| [3] |
Analysis of a vorticity-based fully-mixed formulation for the 3D Brinkman-Darcy problem. Comput. Methods Appl. Mech. Engrg. (2016) 307: 68-95. 
|
| [4] |
An augmented velocity-vorticity-pressure formulation for the Brinkman equations. Int. J. Numer. Methods Fluids (2015) 79: 109-137.
|
| [5] |
A priori and a posteriori error analysis of a mixed scheme for the Brinkman problem. Numer. Math. (2016) 133: 781-817.
|
| [6] |
Stabilized mixed approximation of axisymmetric Brinkman flows. ESAIM: Math. Model. Numer. Anal. (2015) 49: 855-874.
|
| [7] |
D. Boffi, F. Brezzi and M. Fortin, Mixed Finite Element Methods and Applications, Springer Series in Computational Mathematics, 44. Springer, Heidelberg, 2013. |
| [8] |
A mixed virtual element method for the Brinkman problem. Math. Models Methods Appl. Sci. (2017) 27: 707-743.
|
| [9] | Tenth SPE comparative solution project: A comparison of upscaling techniques. SPE Reservoir Eval. Engrg. (2001) 4: 308-317. |
| [10] |
D. A. Di Pietro and A. Ern, Mathematical Aspects of Discontinuous Galerkin Methods, Springer-Verlag Berlin Heidelberg 2012. |
| [11] |
A. Ern and J.-L. Guermond, Finite Elements II—Galerkin Approximation, Elliptic and Mixed PDEs, Texts in Applied Mathematics, Vol. 73, Springer, 2021. |
| [12] |
Finite element quasi-interpolation and best approximation. ESAIM Math. Model. Numer. Anal. (2017) 51: 1367-1385.
|
| [13] |
R. S. Falk, Finite element methods for linear elasticity, in Mixed Finite Elements, Compatibility Conditions, and Applications, F. Brezzi, D. Boffi, L. Demkowicz, and R. G. Durán, eds., Springer, Berlin 2008,159-194. |
| [14] |
Analysis of a pseudostress-based mixed finite element method for the Brinkman model of porous media flow. Numer. Math. (2014) 126: 635-677.
|
| [15] |
G. N. Gatica, M. Munar and F. A. Sequeira, A mixed virtual element method for a nonlinear Brinkman model of porous media flow, Calcolo, 55 (2018), Paper No. 21, 36 pp. |
| [16] |
A second elasticity element using the matrix bubble. IMA J. Numer. Anal. (2012) 32: 352-372.
|
| [17] |
A family of nonconforming elements for the Brinkman problem. IMA J. Numer. Anal. (2012) 32: 1484-1508.
|
| [18] |
Uniformly stable discontinuous Galerkin discretization and robust iterative solution methods for the Brinkman problem. SIAM J. Numer. Anal. (2016) 54: 2750-2774.
|
| [19] |
A dual-mixed finite element method for the Brinkman problem. SMAI J. Comput. Math. (2016) 2: 1-17.
|
| [20] |
Geometric multigrid for Darcy and Brinkman models of flows in highly heterogeneous porous media: A numerical study. J. Comput. Appl. Math. (2017) 310: 174-185.
|
| [21] |
H(div)-conforming finite elements for the Brinkman problem. Math. Models Methods Appl. Sci. (2011) 21: 2227-2248.
|
| [22] | On the importance of the Stokes-Brinkman equations for computing effective permeability in Karst reservoirs. Commun. Comput. Phys. (2011) 10: 1315-1332. |
| [23] |
X. Li and W. Xu, Numerical computation of Brinkman flow with stable mixed element method, Math. Prob. Engrg., (2019), ID 7625201, 10 pp. |
| [24] |
Analyses of mixed continuous and discontinuous Galerkin methods for the time harmonic elasticity problem with reduced symmetry. SIAM J. Sci. Comput. (2015) 37: 1909-1933.
|
| [25] |
S. Meddahi and R. Ruiz-Baier, Symmetric mixed discontinuous Galerkin methods for linear viscoelasticity, preprint, 2022, arXiv: 2203.01662. |
| [26] |
Y. Qian, S. Wu and F. Wang, A mixed discontinuous Galerkin method with symmetric stress for Brinkman problem based on the velocity–pseudostress formulation, Comput. Methods Appl. Mech. Engrg., 368 (2020), article 113177, 23 pp. |
| [27] |
Norm estimates for a maximal right inverse of the divergence operator in spaces of piecewise polynomials. RAIRO Modél. Math. Anal. Numér. (1985) 19: 111-143.
|
| [28] |
A mixed formulation for the Brinkman problem. SIAM J. Numer. Anal. (2014) 52: 258-281.
|
| [29] |
F. Wang, S. Wu and J. Xu, A mixed discontinuous Galerkin method for linear elasticity with strongly imposed symmetry, J. Sci. Comput., 83 (2020), Paper No. 2, 17 pp. |
| [30] |
On the constants in $hp$-finite element trace inverse inequalities. Computer Methods in Applied Mechanics and Engineering (2003) 192: 2765-2773.
|
Figures(3) / Tables(2)
Salim Meddahi, Ricardo Ruiz-Baier. A new DG method for a pure–stress formulation of the Brinkman problem with strong symmetry[J]. Networks and Heterogeneous Media, 2022, 17(6): 893-916. doi: 10.3934/nhm.2022031

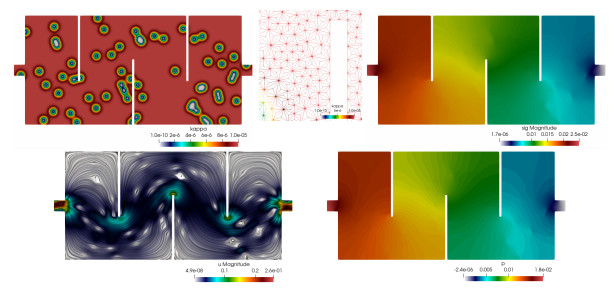
Flow on a maze-shaped domain. Heterogeneous permeability distribution, zoom to visualize the simplicial barycentric trisected mesh, Cauchy stress magnitude, first post-process of velocity, and post-processed pressure
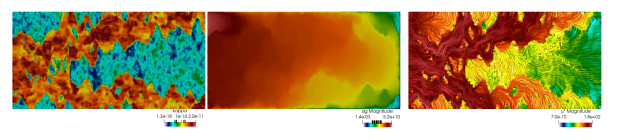
Channel flow with permeability from the SPE10–layer 45 benchmark data, and using a twice quadrisected crisscrossed mesh. Heterogeneous permeability distribution in log scale, Cauchy stress magnitude in log scale, and line integral convolution of second post-process of velocity in log scale
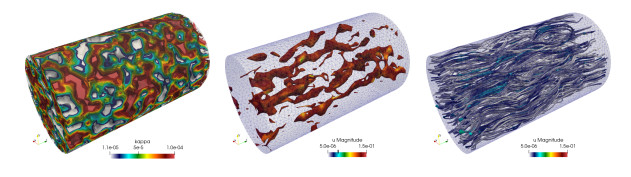
Channel flow with synthetic permeability. The mesh is of simplicial barycentric quadrisected type. Heterogeneous permeability distribution, contour iso-surfaces of velocity magnitude in log scale, and velocity streamlines






 DownLoad:
DownLoad: