Hyperbolic systems on networks often can be written as systems of first order equations on an interval, coupled by transmission conditions at the endpoints, also called port-Hamiltonians. However, general results for the latter have been difficult to interpret in the network language. The aim of this paper is to derive conditions under which a port-Hamiltonian with general linear Kirchhoff's boundary conditions can be written as a system of $ 2\times 2 $ hyperbolic equations on a metric graph $ \Gamma $. This is achieved by interpreting the matrix of the boundary conditions as a potential map of vertex connections of $ \Gamma $ and then showing that, under the derived assumptions, that matrix can be used to determine the adjacency matrix of $ \Gamma $.
Citation: Jacek Banasiak, Adam Błoch. Telegraph systems on networks and port-Hamiltonians. Ⅱ. Network realizability[J]. Networks and Heterogeneous Media, 2022, 17(1): 73-99. doi: 10.3934/nhm.2021024
Hyperbolic systems on networks often can be written as systems of first order equations on an interval, coupled by transmission conditions at the endpoints, also called port-Hamiltonians. However, general results for the latter have been difficult to interpret in the network language. The aim of this paper is to derive conditions under which a port-Hamiltonian with general linear Kirchhoff's boundary conditions can be written as a system of $ 2\times 2 $ hyperbolic equations on a metric graph $ \Gamma $. This is achieved by interpreting the matrix of the boundary conditions as a potential map of vertex connections of $ \Gamma $ and then showing that, under the derived assumptions, that matrix can be used to determine the adjacency matrix of $ \Gamma $.

| [1] |
F. Ali Mehmeti, Nonlinear Waves in Networks, vol. 80 of Mathematical Research, Akademie-Verlag, Berlin, 1994. |
| [2] |
J. Banasiak and A. Bƚoch, Telegraph systems on networks and port-Hamiltonians. I. Boundary conditions and well-posednes, Evol. Eq. Control Th., 2021. |
| [3] |
Some transport and diffusion processes on networks and their graph realizability. Appl. Math. Lett. (2015) 45: 25-30. 
|
| [4] |
Semigroup approach to diffusion and transport problems on networks. Semigroup Forum (2016) 93: 427-443.
|
| [5] |
Asymptotic behaviour of flows on reducible networks. Netw. Heterog. Media (2014) 9: 197-216.
|
| [6] |
J. Bang-Jensen and G. Z. Gutin, Digraphs: Theory, Algorithms and Applications, Springer Science & Business Media, London, 2008. |
| [7] |
G. Bastin and J.-M. Coron, Stability and Boundary Stabilization of 1-D Hyperbolic Systems, vol. 88, Springer, 2016. |
| [8] |
A. Bátkai, M. Kramar Fijavž and A. Rhandi, Positive Operator Semigroups. From Finite to Infinite Dimensions, vol. 257 of Operator Theory: Advances and Applications, Birkhäuser, Cham, 2017. |
| [9] |
Bigraphs versus digraphs via matrices. J. Graph Theory (1980) 4: 51-73.
|
| [10] |
The semigroup approach to transport processes in networks. Phys. D (2010) 239: 1416-1421.
|
| [11] |
M. K. Fijavž, D. Mugnolo and S. Nicaise, Linear hyperbolic systems on networks: Well-posedness and qualitative properties, ESAIM Control Optim. Calc. Var., 27 (2021), Paper No. 7, 46 pp. |
| [12] |
F. R. Gantmacher, Applications of the Theory of Matrices, Interscience Publishers, Inc., New York; Interscience Publishers Ltd., London, 1959. |
| [13] |
R. Hemminger and L. Beineke, Line graphs and line digraphs, in Selected Topics in Graph Theory I (eds. L. Beineke and R. Wilson), Academic Press, London, 1978,271–305. |
| [14] |
$C_0$-semigroups for hyperbolic partial differential equations on a one-dimensional spatial domain. J. Evol. Equ. (2015) 15: 493-502.
|
| [15] |
B. Jacob and H. J. Zwart, Linear Port-Hamiltonian Systems on Infinite-Dimensional Spaces, vol. 223 of Operator Theory: Advances and Applications, Birkhäuser/Springer Basel AG, Basel, 2012. |
| [16] |
The flow approach for waves in networks. Oper. Matrices (2012) 6: 107-128.
|
| [17] |
P. Kuchment, Quantum graphs: An introduction and a brief survey, in Analysis on Graphs and its Applications, vol. 77 of Proc. Sympos. Pure Math., Amer. Math. Soc., Providence, RI, 2008,291–312. |
| [18] |
C. D. Meyer, Matrix Analysis and Applied Linear Algebra, vol. 71, SIAM, Philadelphia, 2000. |
| [19] |
D. Mugnolo, Semigroup Methods for Evolution Equations on Networks, Understanding Complex Systems, Springer, Cham, 2014. |
| [20] |
Control and stabilization of $2\times 2$ hyperbolic systems on graphs. Math. Control Relat. Fields (2017) 7: 53-72.
|
| [21] |
Well-posedness and regularity of hyperbolic boundary control systems on a one-dimensional spatial domain. ESAIM Control Optim. Calc. Var. (2010) 16: 1077-1093.
|
Figures(6)
Jacek Banasiak, Adam Błoch. Telegraph systems on networks and port-Hamiltonians. Ⅱ. Network realizability[J]. Networks and Heterogeneous Media, 2022, 17(1): 73-99. doi: 10.3934/nhm.2021024

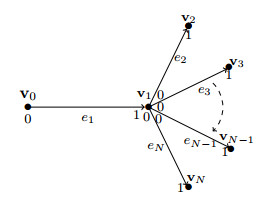
Starlike network of channels
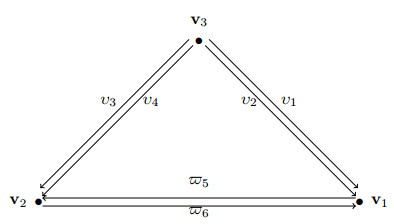
The reconstructed multi digraph
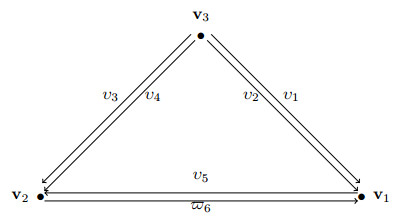
The reconstructed multi digraph
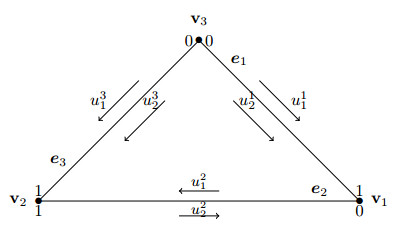
A network
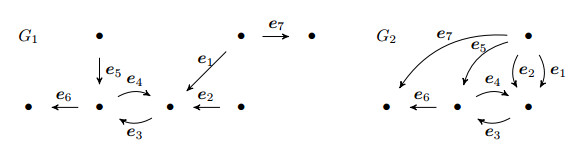
Multi digraphs
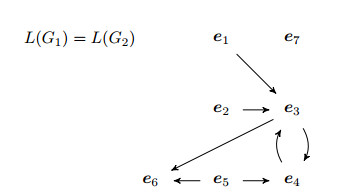
The line digraph for both






 DownLoad:
DownLoad: