Unlike the classical kinetic theory of rarefied gases, where microscopic interactions among gas molecules are described as binary collisions, the modelling of socio-economic phenomena in a multi-agent system naturally requires to consider, in various situations, multiple interactions among the individuals. In this paper, we collect and discuss some examples related to economic and gambling activities. In particular, we focus on a linearisation strategy of the multiple interactions, which greatly simplifies the kinetic description of such systems while maintaining all their essential aggregate features, including the equilibrium distributions.
Citation: Giuseppe Toscani, Andrea Tosin, Mattia Zanella. Kinetic modelling of multiple interactions in socio-economic systems[J]. Networks and Heterogeneous Media, 2020, 15(3): 519-542. doi: 10.3934/nhm.2020029
Unlike the classical kinetic theory of rarefied gases, where microscopic interactions among gas molecules are described as binary collisions, the modelling of socio-economic phenomena in a multi-agent system naturally requires to consider, in various situations, multiple interactions among the individuals. In this paper, we collect and discuss some examples related to economic and gambling activities. In particular, we focus on a linearisation strategy of the multiple interactions, which greatly simplifies the kinetic description of such systems while maintaining all their essential aggregate features, including the equilibrium distributions.

| [1] |
Binary interaction algorithms for the simulation of flocking and swarming dynamics. Multiscale Model. Simul. (2013) 11: 1-29. 
|
| [2] |
Some kinetic models for a market economy. Boll. Unione Mat. Ital. (2017) 10: 143-158.
|
| [3] |
Kinetic models of conservative economies with wealth redistribution. Commun. Math. Sci. (2009) 7: 901-916.
|
| [4] |
On the self-similar asymptotics for generalized nonlinear kinetic Maxwell models. Comm. Math. Phys. (2009) 291: 599-644.
|
| [5] |
Kinetic modeling of economic games with large number of participants. Kinet. Relat. Models (2011) 4: 169-185.
|
| [6] |
Kinetic models for goods exchange in a multi-agent market. Phys. A (2018) 499: 362-375.
|
| [7] |
Particle based gPC methods for mean-field models of swarming with uncertainty. Commun. Comput. Phys. (2019) 25: 508-531.
|
| [8] |
On a kinetic model for a simple market economy. J. Stat. Phys. (2005) 120: 253-277.
|
| [9] |
Numerical methods for kinetic equations. Acta Numer. (2014) 23: 369-520.
|
| [10] |
Kinetic modeling of alcohol consumption. J. Stat. Phys. (2019) 177: 1022-1042.
|
| [11] |
B. Düring, L. Pareschi and G. Toscani, Kinetic models for optimal control of wealth inequalities, Eur. Phys. J. B, 91 (2018), 12pp. |
| [12] |
Scaling solutions of inelastic Boltzmann equations with over-populated high energy tails. J. Statist. Phys. (2002) 109: 407-432.
|
| [13] |
Statistical equilibrium in simple exchange games. Ⅱ. The redistribution game. Eur. Phys. J. B (2007) 60: 241-246.
|
| [14] | Taxes in a wealth distribution model by inelastically scattering of particles. Interdisciplinary Description Complex Syst. (2009) 7: 1-7. |
| [15] |
Pareto tails in socio-economic phenomena: A kinetic description. Economics (2018) 12: 1-17.
|
| [16] |
Human behavior and lognormal distribution. A kinetic description. Math. Models Methods Appl. Sci. (2019) 29: 717-753.
|
| [17] |
Online social networking and addiction – A review of the physchological literature. Int. J. Environ. Res. Public Health (2011) 8: 3528-3552.
|
| [18] | (2013) Interacting Multiagent Systems: Kinetic Equations and Monte Carlo Methods. Oxford University Press. |
| [19] |
Structure preserving schemes for nonlinear Fokker-Planck equations and applications. J. Sci. Comput. (2018) 74: 1575-1600.
|
| [20] |
Inelastically scattering particles and wealth distribution in an open economy. Phys. Rev. E (2004) 69: 1-7.
|
| [21] |
Kinetic models of opinion formation. Commun. Math. Sci. (2006) 4: 481-496.
|
| [22] |
G. Toscani, Wealth redistribution in conservative linear kinetic models, Europhys. Lett. (EPL), 88 (2009). |
| [23] |
Kinetic models for the trading of goods. J. Stat. Phys. (2013) 151: 549-566.
|
| [24] |
Opinion modeling on social media and marketing aspects. Phys. Rev. E (2018) 98: 1-15.
|
| [25] |
Multiple-interaction kinetic modeling of a virtual-item gambling economy. Phys. Rev. E (2019) 100: 1-16.
|
| [26] |
Behavior analysis of virtual-item gambling. Phys. Rev. E (2018) 98: 1-12.
|
| [27] |
X. Wang and M. Pleimling, Online gambling of pure chance: Wager distribution, risk attitude, and anomalous diffusion, Sci. Rep., 9 (2019). |





Figures(6)
Giuseppe Toscani, Andrea Tosin, Mattia Zanella. Kinetic modelling of multiple interactions in socio-economic systems[J]. Networks and Heterogeneous Media, 2020, 15(3): 519-542. doi: 10.3934/nhm.2020029

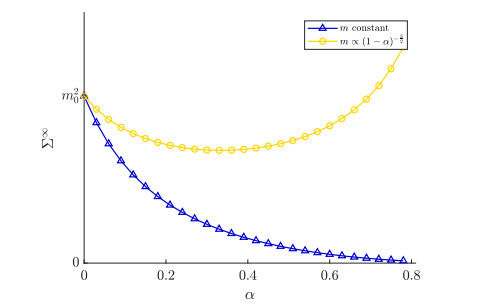
The asymptotic wealth variance
Evolution at times
Comparison between the large time solution (
Comparison between the equilibrium distribution
Evolution at times
Left: comparison of the equilibrium distribution 30 and the large time distribution of the linearised model (22), (24) in the quasi-invariant limit. Right: comparison of the evolution of the energy of the multiple-interaction model (20) with






 DownLoad:
DownLoad: