A generic feature of bounded confidence type models is the formation of clusters of agents. We propose and study a variant of bounded confidence dynamics with the goal of inducing unconditional convergence to a consensus. The defining feature of these dynamics which we name the No one left behind dynamics is the introduction of a local control on the agents which preserves the connectivity of the interaction network. We rigorously demonstrate that these dynamics result in unconditional convergence to a consensus. The qualitative nature of our argument prevents us quantifying how fast a consensus emerges, however we present numerical evidence that sharp convergence rates would be challenging to obtain for such dynamics. Finally, we propose a relaxed version of the control. The dynamics that result maintain many of the qualitative features of the bounded confidence dynamics yet ultimately still converge to a consensus as the control still maintains connectivity of the interaction network.
Citation: GuanLin Li, Sebastien Motsch, Dylan Weber. Bounded confidence dynamics and graph control: Enforcing consensus[J]. Networks and Heterogeneous Media, 2020, 15(3): 489-517. doi: 10.3934/nhm.2020028
A generic feature of bounded confidence type models is the formation of clusters of agents. We propose and study a variant of bounded confidence dynamics with the goal of inducing unconditional convergence to a consensus. The defining feature of these dynamics which we name the No one left behind dynamics is the introduction of a local control on the agents which preserves the connectivity of the interaction network. We rigorously demonstrate that these dynamics result in unconditional convergence to a consensus. The qualitative nature of our argument prevents us quantifying how fast a consensus emerges, however we present numerical evidence that sharp convergence rates would be challenging to obtain for such dynamics. Finally, we propose a relaxed version of the control. The dynamics that result maintain many of the qualitative features of the bounded confidence dynamics yet ultimately still converge to a consensus as the control still maintains connectivity of the interaction network.

| [1] |
M. Ballerini, N. Cabibbo, R. Candelier, A. Cavagna and E. Cisbani, et al., Empirical investigation of starling flocks: A benchmark study in collective animal behaviour, Animal Behaviour, 76 (2008), 201–215. |
| [2] |
On Krause's multi-agent consensus model with state-dependent connectivity. IEEE Trans. Automat. Control (2009) 54: 2586-2597. 
|
| [3] |
V. D. Blondel, J. M. Hendrickx and J. N. Tsitsiklis, On the 2R conjecture for multi-agent systems, 2007 European Control Conference (ECC), Kos, Greece, 2007. |
| [4] |
J. Buhl, D. J. T. Sumpter, I. D. Couzin, J. J. Hale and E. Despland, et al., From disorder to order in marching locusts, Science, 312 (2006), 1402–1406. |
| [5] |
Sparse stabilization and optimal control of the Cucker-Smale model. Math. Control Relat. Fields (2013) 3: 447-466.
|
| [6] |
Statistical physics of social dynamics. Rev. Mod. Phys. (2009) 81: 591-646.
|
| [7] |
Mixing beliefs among interacting agents. Adv. Complex Syst. (2000) 3: 87-98.
|
| [8] |
E. Estrada, E. Vargas-Estrada and H. Ando, Communicability angles reveal critical edges for network consensus dynamics, Phys. Rev. E (3), 92 (2015), 10pp. |
| [9] |
K. Garimella, G. De Francisci Morales, A. Gionis and M. Mathioudakis, Political discourse on social media: Echo chambers, gatekeepers, and the price of bipartisanship, Proc. 2018 World Wide Web Conference, 2018, 913–922. |
| [10] |
E. Gilbert, T. Bergstrom and K. Karahalios, Blogs are echo chambers: Blogs are echo chambers, 2009 42nd Hawaii International Conference on System Sciences, Big Island, HI, 2009. |
| [11] |
D. Goldie, M. Linick, H. Jabbar and C. Lubienski, Using Bibliometric and social media analyses to explore the "echo chamber" hypothesis, Educational Policy, 28 (2014). |
| [12] |
R. Hegselmann and U. Krause, Opinion dynamics and bounded confidence: models, analysis and simulation, J. Artificial Societies Social Simulation, 5 (2002). |
| [13] |
J.-B. Hiriart-Urruty and C. Lemaréchal, Fundamentals of Convex Analysis, Grundlehren Text Editions, Springer-Verlag, Berlin, 2001. |
| [14] |
Clustering and asymptotic behavior in opinion formation. J. Differential Equations (2014) 257: 4165-4187.
|
| [15] |
D. Kempe, J. Kleinberg and E. Tardos, Maximizing the spread of influence through a social network, Proc. Ninth ACM SIGKDD Internat. Conference Knowledge Discovery Data Mining, 2003, 137–146. |
| [16] |
U. Krause, A discrete nonlinear and non-autonomous model of consensus formation, Communications in Difference Equations, Gordon and Breach, Amsterdam, 2000, 227–236. |
| [17] |
Continuous opinion dynamics under bounded confidence: A survey. Internat. J. Modern Phys. C (2007) 18: 1819-1838.
|
| [18] |
J. Lorenz, Consensus strikes back in the Hegselmann-Krause model of continuous opinion dynamics under bounded confidence, J. Artificial Societies Social Simulation, (2006). |
| [19] |
Heterophilious dynamics enhances consensus. SIAM Rev. (2014) 56: 577-621.
|
| [20] |
Consensus and cooperation in networked multi-agent systems. Proc. IEEE (2007) 95: 215-233.
|
| [21] |
Sparse control of Hegselmann–Krause models: Black hole and declustering. SIAM J. Control Optim. (2019) 57: 2628-2659.
|
| [22] |
L.-A. Poissonnier, S. Motsch, J. Gautrais, J. Buhl and A. Dussutour, Experimental investigation of ant traffic under crowded conditions, eLife, 8 (2019). |
| [23] |
W. Quattrociocchi, A. Scala and C. R. Sunstein, Echo Cchambers on Facebook, SSRN, in progress. |
| [24] |
R. O. Saber and R. M. Murray, Consensus protocols for networks of dynamic agents, Proc. 2003 American Control Conference, Denver, CO, 2003. |
| [25] |
D. Spanos, R. Olfati-Saber and R. Murray, Dynamic consensus on mobile networks, IFAC World Congress, Citeseer, 2005, 1–6. |
| [26] |
Novel type of phase transition in a system of self-driven particles. Phys. Rev. Lett. (1995) 75: 1226-1229.
|
| [27] |
Deterministic versus stochastic consensus dynamics on graphs. J. Stat. Phys. (2019) 176: 40-68.
|
| [28] |
Opinion dynamics: A multidisciplinary review and perspective on future research. Internat. J. Knowledge Syst. Sci. (IJKSS) (2011) 2: 72-91.
|
| [29] |
Second-order consensus for multiagent systems with directed topologies and nonlinear dynamics. IEEE Trans. Syst. Man Cybernetics, Part B (2010) 40: 881-891.
|
Figures(17)
GuanLin Li, Sebastien Motsch, Dylan Weber. Bounded confidence dynamics and graph control: Enforcing consensus[J]. Networks and Heterogeneous Media, 2020, 15(3): 489-517. doi: 10.3934/nhm.2020028

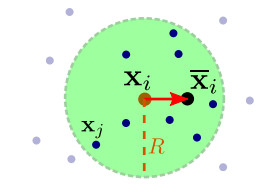
The movement of an agent according to the bounded confidence dynamics (2.3)
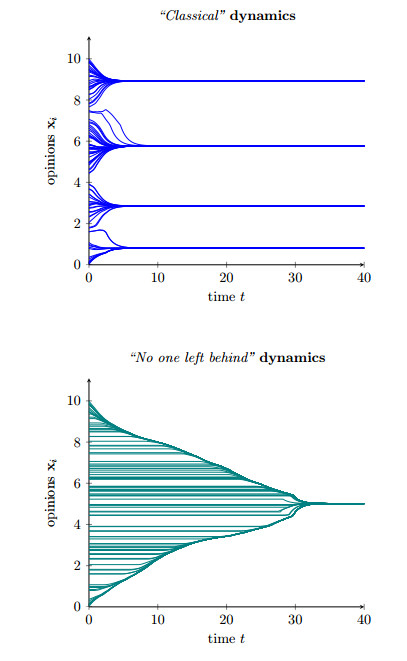
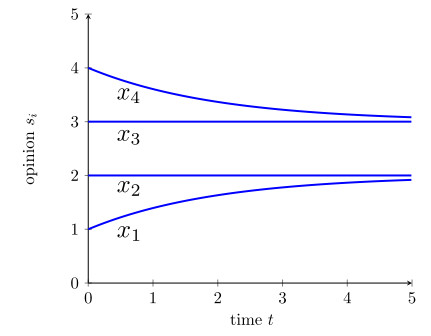
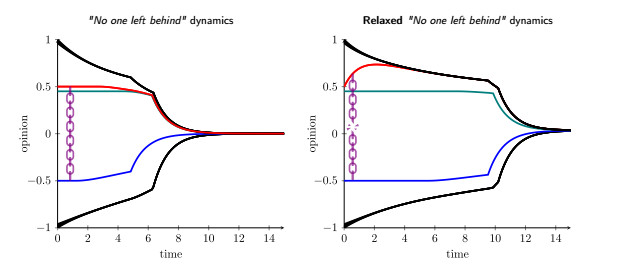
Simulation of the opinion dynamics without and with control (resp. left and right figure), e.g. solving resp. (2.3) and Model 1 with
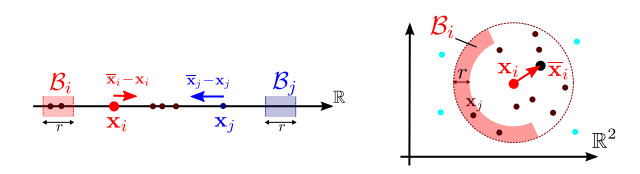
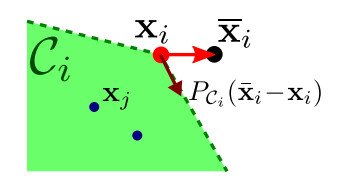
Illustration of the critical regions (3.1) in
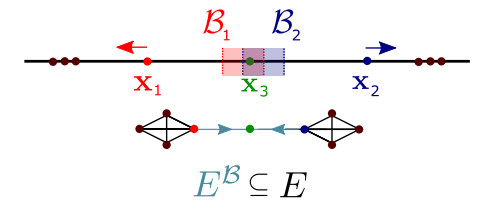
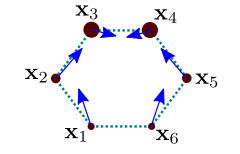
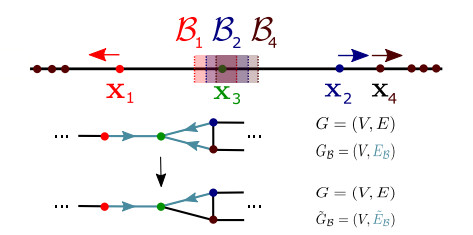
A configuration of agents (top) and the resulting interaction graph (edge set E, black) and behind graph (edge set
Counter-example in multi-dimension. Blue arrow is the velocity of each cluster. In this setting, every agent has someone in its critical region
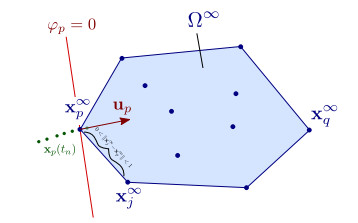
The velocity of agent
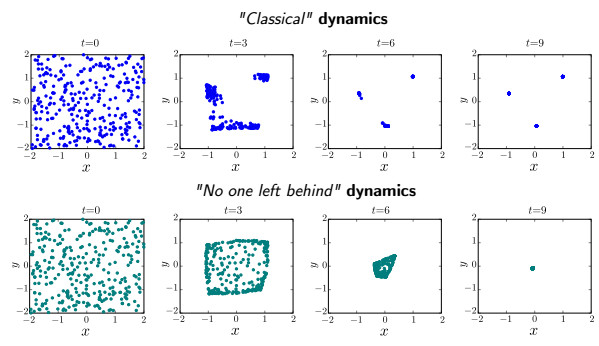
2D simulation of opinion dynamics without and with control (resp, top and bottom figure), e.g. solving resp. (1) and (3.5) with
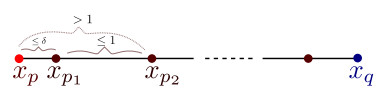
Preserving connectivity does not imply the convergence to a consensus. Here, when
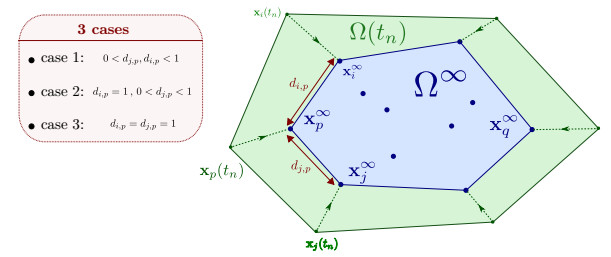
The convex hull
If the limit configuration
Situation in the case 2. The extreme point
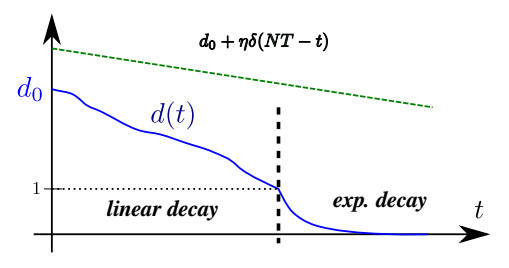
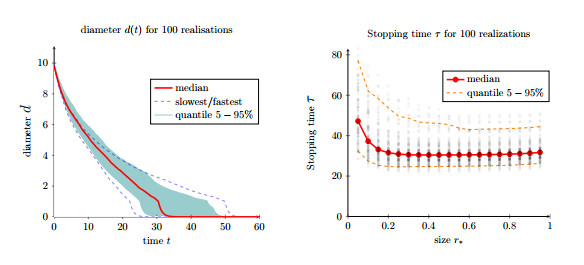
The decay of the diameter
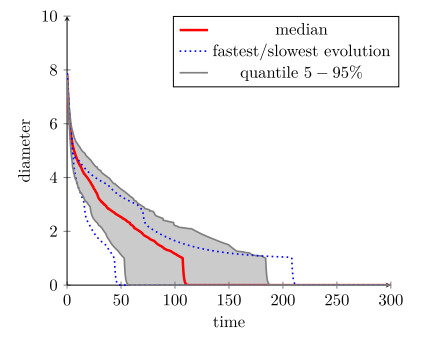
Left: diameter
An example of how the behind graph can be relaxed while still ensuring that the interaction graph remains connected. The interaction graph is represented by undirected and directed edges, the behind graph is represented by only the blue directed edges. Agent 3 is in the behind region of both agent 2 and agent 4 and agents 2 and 4 are connected in the interaction graph therefore we may remove the edge from agent 4 to agent 3
The NOLB dynamics do not allow the red agent to disconnect from the blue agent (illustrated with a purple chain). The RNOLB dynamics allow this disconnection to occur but maintain connectivity of the whole configuration
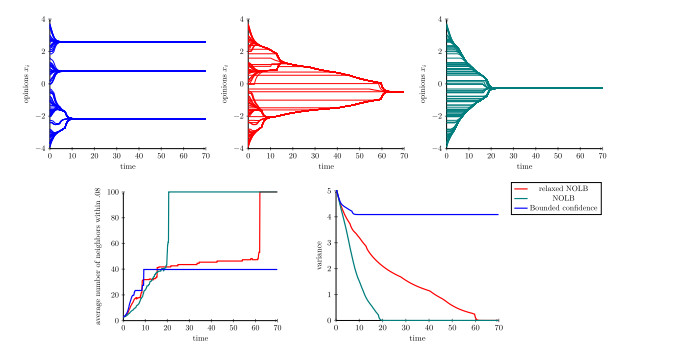
The RNOLB dynamics can be seen as an interpolation between NOLB and bounded confidence
Diameter,






 DownLoad:
DownLoad: