




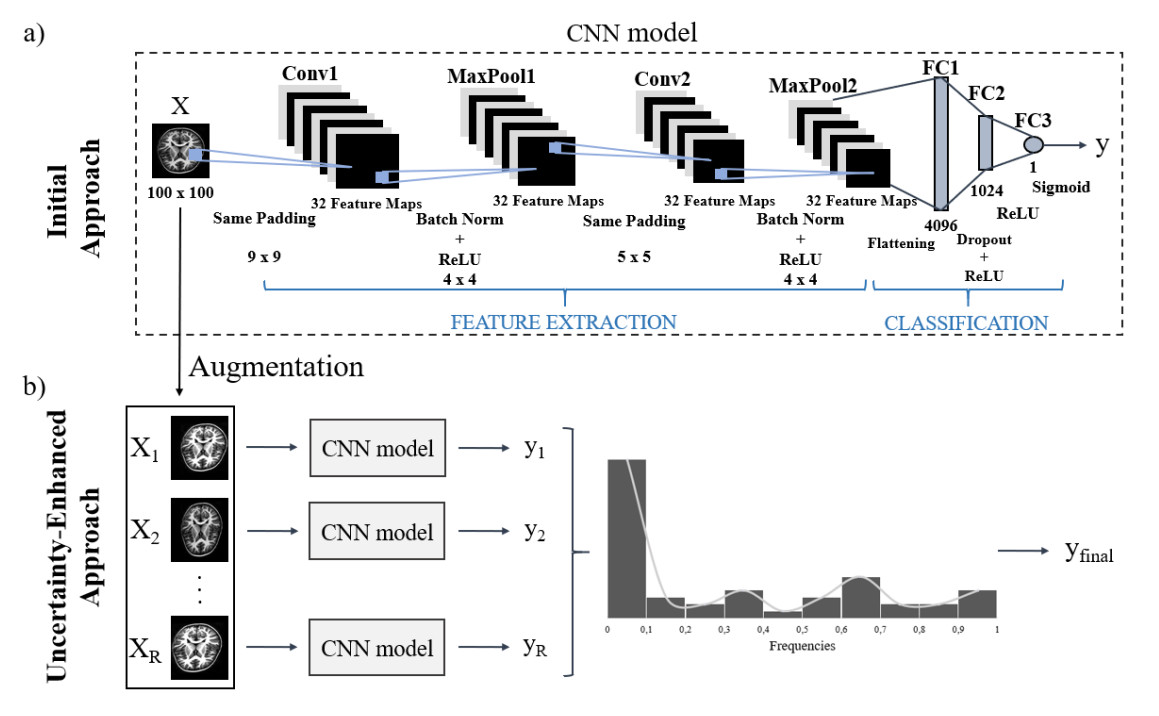
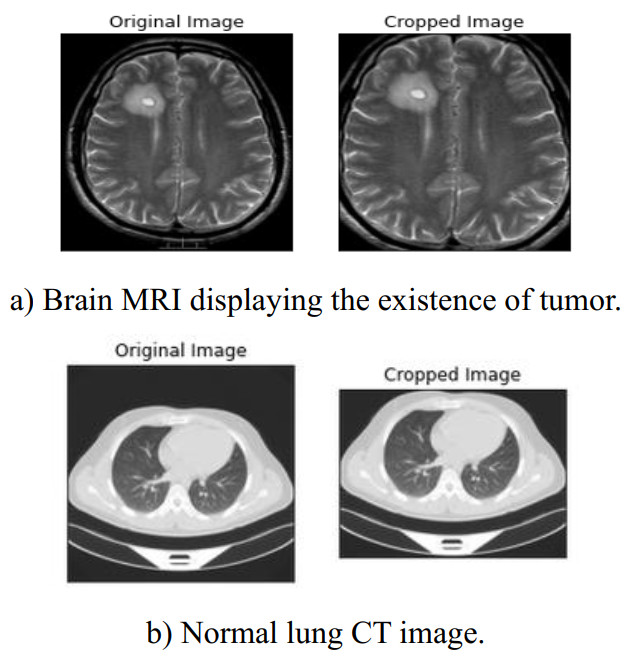
The automated detection of tumors using medical imaging data has garnered significant attention over the past decade due to the critical need for early and accurate diagnoses. This interest is fueled by advancements in computationally efficient modeling techniques and enhanced data storage capabilities. However, methodologies that account for the uncertainty of predictions remain relatively uncommon in medical imaging. Uncertainty quantification (UQ) is important as it helps decision-makers gauge their confidence in predictions and consider variability in the model inputs. Numerous deterministic deep learning (DL) methods have been developed to serve as reliable medical imaging tools, with convolutional neural networks (CNNs) being the most widely used approach. In this paper, we introduce a low-complexity uncertainty-based CNN architecture for medical image classification, particularly focused on tumor and heart failure (HF) detection. The model's predictive (aleatoric) uncertainty is quantified through a test-set augmentation technique, which generates multiple surrogates of each test image. This process enables the construction of empirical distributions for each image, which allows for the calculation of mean estimates and credible intervals. Importantly, this methodology not only provides UQ, but also significantly improves the model's classification performance. This paper represents the first effort to demonstrate that test-set augmentation can significantly improve the classification performance of medical images. The proposed DL model was evaluated using three datasets: (a) brain magnetic resonance imaging (MRI), (b) lung computed tomography (CT) scans, and (c) cardiac MRI. The low-complexity design of the model enhances its robustness against overfitting, while it is also easily re-trainable in case out-of-distribution data is encountered, due to the reduced computational resources required by the introduced architecture.
Citation: Vasileios E. Papageorgiou, Georgios Petmezas, Pantelis Dogoulis, Maxime Cordy, Nicos Maglaveras. Uncertainty CNNs: A path to enhanced medical image classification performance[J]. Mathematical Biosciences and Engineering, 2025, 22(3): 528-553. doi: 10.3934/mbe.2025020
| [1] | Qing Sun . Irrigable measures for weighted irrigation plans. Networks and Heterogeneous Media, 2021, 16(3): 493-511. doi: 10.3934/nhm.2021014 |
| [2] | Xin Yang Lu . Regularity of densities in relaxed and penalized average distance problem. Networks and Heterogeneous Media, 2015, 10(4): 837-855. doi: 10.3934/nhm.2015.10.837 |
| [3] | Rudy R. Negenborn, Peter-Jules van Overloop, Tamás Keviczky, Bart De Schutter . Distributed model predictive control of irrigation canals. Networks and Heterogeneous Media, 2009, 4(2): 359-380. doi: 10.3934/nhm.2009.4.359 |
| [4] | Didier Georges . Infinite-dimensional nonlinear predictive control design for open-channel hydraulic systems. Networks and Heterogeneous Media, 2009, 4(2): 267-285. doi: 10.3934/nhm.2009.4.267 |
| [5] | Thibault Liard, Raphael Stern, Maria Laura Delle Monache . A PDE-ODE model for traffic control with autonomous vehicles. Networks and Heterogeneous Media, 2023, 18(3): 1190-1206. doi: 10.3934/nhm.2023051 |
| [6] | Ling Zhang, Xuewen Tan, Jia Li, Fan Yang . Dynamic analysis and optimal control of leptospirosis based on Caputo fractional derivative. Networks and Heterogeneous Media, 2024, 19(3): 1262-1285. doi: 10.3934/nhm.2024054 |
| [7] | Vincent Renault, Michèle Thieullen, Emmanuel Trélat . Optimal control of infinite-dimensional piecewise deterministic Markov processes and application to the control of neuronal dynamics via Optogenetics. Networks and Heterogeneous Media, 2017, 12(3): 417-459. doi: 10.3934/nhm.2017019 |
| [8] | Xiaoqian Gong, Benedetto Piccoli . A measure model for the spread of viral infections with mutations. Networks and Heterogeneous Media, 2022, 17(3): 427-442. doi: 10.3934/nhm.2022015 |
| [9] | João M. Lemos, Fernando Machado, Nuno Nogueira, Luís Rato, Manuel Rijo . Adaptive and non-adaptive model predictive control of an irrigation channel. Networks and Heterogeneous Media, 2009, 4(2): 303-324. doi: 10.3934/nhm.2009.4.303 |
| [10] | Wen Dong, Dongling Wang . Mittag-Leffler stability of numerical solutions to linear homogeneous time fractional parabolic equations. Networks and Heterogeneous Media, 2023, 18(3): 946-956. doi: 10.3934/nhm.2023041 |
The automated detection of tumors using medical imaging data has garnered significant attention over the past decade due to the critical need for early and accurate diagnoses. This interest is fueled by advancements in computationally efficient modeling techniques and enhanced data storage capabilities. However, methodologies that account for the uncertainty of predictions remain relatively uncommon in medical imaging. Uncertainty quantification (UQ) is important as it helps decision-makers gauge their confidence in predictions and consider variability in the model inputs. Numerous deterministic deep learning (DL) methods have been developed to serve as reliable medical imaging tools, with convolutional neural networks (CNNs) being the most widely used approach. In this paper, we introduce a low-complexity uncertainty-based CNN architecture for medical image classification, particularly focused on tumor and heart failure (HF) detection. The model's predictive (aleatoric) uncertainty is quantified through a test-set augmentation technique, which generates multiple surrogates of each test image. This process enables the construction of empirical distributions for each image, which allows for the calculation of mean estimates and credible intervals. Importantly, this methodology not only provides UQ, but also significantly improves the model's classification performance. This paper represents the first effort to demonstrate that test-set augmentation can significantly improve the classification performance of medical images. The proposed DL model was evaluated using three datasets: (a) brain magnetic resonance imaging (MRI), (b) lung computed tomography (CT) scans, and (c) cardiac MRI. The low-complexity design of the model enhances its robustness against overfitting, while it is also easily re-trainable in case out-of-distribution data is encountered, due to the reduced computational resources required by the introduced architecture.
Emergent dynamics in interacting multi-agent systems are commonly observed in nature. Natural phenomena, including animal migration [1], bacterial movement [2], and synchronization of coupled cells [3] and fireflies [4], exhibit collective behaviors. For instance, in the field of ecology, collective behaviors can facilitate population reproduction, predator evasion, and the reduction of competition among individuals. Ultimately, these behaviors can enhance the population's safety coefficient. Therefore, studying collective behaviors is of significant importance and meaning.
To investigate aggregation phenomena, biophysicist T. Vicsek et al. conducted numerical experiments to elucidate the mechanisms underlying collective motion [5]. A. Jadbabaie subsequently verified these experiments through analytical methods [6]. Following the pioneering work of T. Vicsek et al. numerous mathematical models have been developed to study emergent behavior. Professors Cucker and Smale proposed the Cucker-Smale model, which characterizes aggregation phenomena [7]. The Cucker-Smale model describes a flocking dynamic system with position and velocity following Newtonian dynamics. For the i−th particle in the Cucker-Smale model, let xi∈Rd and vi∈Rd denote its position and velocity. Here, Rd represents d-dimensional Euclidean space. The Cucker-Smale model is governed by
| {dxidt=vi,t>0,i∈[N]:={1,2,⋯,N},dvidt=κN−1∑j≠iϕ(||xi−xj||)(vj−vi),(xi(0),vi(0))=(x0i,v0i)∈Rd×Rd, | (1.1) |
where N represents the number of particles, κ denotes the non-negative coupling strength, and ||⋅|| denotes the standard l2-norm. ϕ signifies the communication weight. The Cucker-Smale model offers unique advantages in mathematical analysis due to its high degree of symmetry. Additionally, the solution's large-time behavior is determined solely by the initial conditions and the interaction function ϕ. Since its proposal, the Cucker-Smale model has been the subject of extensive research, with scholars exploring diverse communication weights ϕ(r) tailored to specific application contexts. For instance, the authors of [8] adopted the communication weight ϕ(r) as ϕ(r)=1rβ, known as the singular kernel, to conduct a detailed analysis of its clustering behavior.
However, the Cucker-Smale model cannot describe the aggregative behaviors influenced by external factors, including light and temperature. For instance, Bhaya et al. [9] and Jakob et al. [10] observed that cyanobacteria actively migrate toward light sources under certain conditions. Ha et al. [11] investigated the effect of temperature on aggregative behavior, resulting in the development of a thermodynamic Cucker-Smale (in short, TCS) model. Since then, the TCS model has also been a subject of extensive research. Two sufficient frameworks for the emergence of mono-cluster flocking on a digraph for the continuous and discrete models were presented in [12]. The emergent behaviors of a TCS ensemble confined in a harmonic potential field was studied in [13]. The coupling of a kinetic TCS equation and viscous fluid system was proposed and considered in [14,15]. Based on system (1.1), we set Ti to denote the temperature of the i−th particle, and then the TCS model is governed by
| {dxidt=vi,t>0,i∈[N]:={1,2,⋯,N},dvidt=κ1N−1∑j≠iϕ(||xi−xj||)(vjTj−viTi),ddt(Ti+12||vi||2)=κ2N−1∑j≠iζ(||xi−xj||)(1Ti−1Tj),(xi(0),vi(0),Ti(0))=(x0i,v0i,T0i)∈Rd×Rd×(0,+∞), | (1.2) |
where N denotes the number of particles, while κ1 and κ2 represent strictly positive coupling strengths. Moreover, ϕ,ζ, which are mappings from (0,+∞)→(0,+∞), serve as the communication weights. These functions are non-negative, locally Lipschitz continuous, and monotonically decreasing.
Based on the conceptual framework for the unit-speed Cucker-Smale model presented in [16], Ahn modified the velocity coupling term to guarantee that each velocity possesses a constant positive modulus [17], as follows:
| {dxidt=vi,t>0,i∈[N]:={1,2,⋯,N},dvidt=κ1N−1∑j≠iϕ(||xi−xj||)(vjTj−⟨vi,vj⟩viTj||vi||2),ddt(Ti+12||vi||2)=κ2N−1∑j≠iζ(||xi−xj||)(1Ti−1Tj),(xi(0),vi(0),Ti(0))=(x0i,v0i,T0i)∈Rd×Sd−1×(0,+∞), | (1.3) |
where N, κ1, κ2, and communication weights ϕ,ζ are defined as above. The term Sd−1 denotes the unit (d−1)-sphere. However, the author of [17] only addressed the scenarios where the communication weights ϕ and ζ are non-negative, bounded, locally Lipschitz continuous, and monotonically decreasing.
Furthermore, the author of [18] employed suitable subdivided configurations {Zα}nα=1 and demonstrated that the velocity and temperature of all agents within each cluster group converge to identical values. In addition, based on the results of [17], the authors of [19] proved that asymptotic flocking occurs when the communication weights ϕ,ζ are singular kernels.
This article considers the multi-cluster flocking dynamics of the thermodynamic Cucker-Smale model with a unit-speed constraint (TCSUS) under a singular kernel. The system (1.3) is reorganized into a multi-cluster framework, which is governed by,
| {dxαidt=vαi,t>0,i∈[Nα]:={1,2,⋯,Nα},α∈[n]:={1,2,⋯n},n≥3,dvαidt=κ1N−1Nα∑j=1j≠iϕ(||xαi−xαj||)(vαjTαj−⟨vαi,vαj⟩vαiTαj||vαi||2)+κ1N−1∑β≠αNβ∑j=1ϕ(||xαi−xβj||)(vβjTβj−⟨vαi,vβj⟩vαiTβj||vαi||2),ddt(Tαi+12||vαi||2)=κ2N−1Nα∑j=1j≠iζ(||xαi−xαj||)(1Tαi−1Tαj)+κ2N−1∑β≠αNβ∑j=1ζ(||xαi−xβj||)(1Tαi−1Tβj),(xαi(0),vαi(0),Tαi(0))=(x0αi,v0αi,T0αi)∈Rd×Sd−1×(0,+∞), | (1.4) |
where t represents time, n represents the number of clusters, N represents the number of particles, and Nα represents the number of particles in the α−th cluster. Additionally, xαi, vαi, and Tαi denote the position, velocity, and temperature of the i−th particle in the α−th cluster, respectively. Furthermore, κ1 and κ2 represent strictly positive coupling strengths, and Sd−1 is the unit (d−1)-sphere. Specifically, we assume that when the communication weights ϕ,ζ are singular kernels, they will take the following explicit assumption: ϕ(r)=1rλ,ζ(r)=1rμ(λ,μ>0).
In fact, system (1.4) corresponds exactly to system (1.3). The formulation of system (1.4) specifically highlights the influence of different clusters on particle dynamics.
Previous studies in [17,18] thoroughly explored mono-cluster, bi-cluster, and multi-cluster flocking behaviors in system (1.4) under a standard kernel. More recently, studies cited in [19] have concentrated on mechanical flocking and thermal homogenization within the TCSUS model under a singular kernel. However, a comprehensive study about the multi-cluster flocking of TCSUS under a singular kernel remains largely unexplored. In this paper, we mainly focus on studying the multi-cluster flocking under a strong singular kernel and provide relevant conclusions and estimates.
For simplicity, we apply the following notation:
Notation 1.1. For the vector u∈Rd, we denote by ||u|| and ui the Euclidean l2−norm of u and its i−th component, respectively. The standard inner product of two vectors u,v∈Rd is denoted by ⟨u,v⟩. The distance between two sets A and B is denoted by d(A,B):=inf{d(x,y):x∈A,y∈B}. For simplicity, we define [N]:={1,2,⋯,N}. Given fixed real sequences {ai}ni=1 and {bi}ni=1, we define the family of sets {Iα}nα=1 such that Iα:=[aα,bα]. The solution of system (1.3) is denoted by A:=(a1,a2,⋯,aN), where A∈{X,V,T}, and a∈{x,v,T}. After we reorganize the system (1.3) into a multi-cluster configuration (1.4), if we denote the solution of the α−th cluster as Aα:=(aα1,aα2,⋯,aαNα), where A∈{X,V,T} and a∈{x,v,T}, it becomes evident that A=(a1,a2,⋯,aN)=(A1,A2,⋯,An). In addition, we define a0:=a(0). The generic constant C may differ from line to line. We define the centers for position, velocity, and temperature of the α−th cluster as xcenα:=1Nα∑i∈[Nα]xαi, vcenα:=1Nα∑i∈[Nα]vαi, and Tcenα:=1Nα∑i∈[Nα]Tαi, respectively. Furthermore, we define the minimum temperature of the α−th cluster as Tαm(t):=mini∈[Nα]Tαi(t) and the maximum temperature of the α−th cluster as TαM(t):=maxi∈[Nα]Tαi(t). We define the minimum temperature of the whole system as Tm(t):=minα∈[n]Tαm(t) and the maximum temperature of the whole system as TM(t):=maxα∈[n]TαM(t). The minimum inner product throughout the system is denoted as A(v):=minα,β∈[n]i∈[Nα],j∈[Nβ]⟨vαi,vβj⟩.
First, we define the L∞− diameters for position, velocity, and temperature of each cluster group Zα:={(xαi,vαi,Tαi)}Nαi=1 as follows:
● (position-velocity-temperature diameters for the α−th cluster group)
DXα:=maxi,j∈[Nα]||xαi−xαj||, DVα:=maxi,j∈[Nα]||vαi−vαj||, DTα:=maxi,j∈[Nα]|Tαi−Tαj|,
● (position-velocity-temperature diameters for the whole system)
DX:=n∑α=1DXα, DV:=n∑α=1DVα, DT:=n∑α=1DTα.
Then, we define the following three configuration vectors for each cluster group:
Xα:=(xα1,xα2,⋯,xαNα), Vα:=(vα1,vα2,⋯,vαNα), Tα:=(Tα1,Tα2,⋯,TαNα), where 1≤α≤n.
Next, we introduce the definition of the multi-cluster flocking behavior of system (1.4):
Definition 1.1. Let Z={(xi,vi,Ti)}Ni=1 be a solution to system (1.4). Then, the configuration Z exhibits multi-cluster flocking if there exist n cluster groups Zα={(xαi,vαi,Tαi)}Nαi=1 such that the following assertions hold for 2≤n≤N and 1≤α≤n:
● |Zα|=Nα≥1,n∑α=1|Zα|=n∑α=1Nα=N,n⋃α=1Zα=Z,
● ∀α∈[n],sup0≤t<∞max1≤k,l≤Nα||xαk−xαl||<∞, limt→∞max1≤k,l≤Nα||vαk−vαl||=0, limt→∞max1≤k,l≤Nα|Tαk−Tαl|=0,
● inf0≤t<∞mink,l||xαk−xβl||=∞,1≤k≤Nα, 1≤l≤Nβ,1≤α≠β≤n.
To describe adequate frameworks for multi-cluster flocking estimation, we display the admissible data and conditions (H) as follows:
| (H):={(X(0),V(0),T(0))∈R2dN×(0,+∞)N|(H0),(H1),(H2), and (H3) hold.} |
(i)(H0) (Notation): For brevity, we have the following notation:
| T∞m:=Tm(0),T∞M:=TM(0),δ0:=inf0≤t≤∞min1≤i≠j≤N||xi(t)−xj(t)||,r0:=minα<β,i,j(xkβj(0)−xkαi(0)),R0:=maxα<β,i,j(xkβj(0)−xkαi(0)) for some fixed1≤k≤d,Λ0(D∞X):=κ1min(N1,⋯,Nα)A(v0)ϕ(D∞X)(N−1)T∞M,ˉΛ0(D∞X):=κ2(min(N1,…,Nα)−2)ζ(D∞X)N(T∞M)2,Λ:=DV(0)Λ0+4(n−1)Nκ1(N−1)T∞mΛ20ϕ(r02)+4(n−1)Nκ1(N−1)min1≤α≤n−1d(Iα,Iα+1)T∞mΛ0∫∞r02ϕ(s)ds,Λα:=κ1(Nα−1)ϕ(δ0)(N−1)T∞mΛ+κ1(N−Nα)(N−1)T∞m(min1≤α≤n−1d(Iα,Iα+1))∫∞r02ϕ(s)ds. |
(ii)(H1) (Well prepared conditions): There exists a strictly positive number D∞X>0 such that
| D∞X≥DX(0)+max(Λ,DV(0)T∞Mκ1A(v0)ϕ(D∞X)),andλ,μ>1(strong kernel). |
(iii)(H2) (Separated initial data): For fixed 1≤k≤d in (H0), there exist real sequences {ai}ni=1 and {bi}ni=1 such that the initial data and system parameters are appropriately split as follows:
| r0>0,a1<b1<a2<b2⋯<an<bn,Iα=[aα,bα]⊂[−1,1],Iα∩Iβ=∅(β≠α),[vkαi(0)−Λα,vkαi(0)+Λα]⊂Iα=[aα,bα]⊂[−1,1],α,β=1,…,n,i=1,…,Nα. |
(iv)(H3) (Small fluctuations): The local velocity perturbation for all cluster groups is sufficiently small as follows:
| DV(0)≤κ1A(v0)T∞M∫D∞XDX(0)ϕ(s)ds. | (1.5) |
Finally, we present the main theorems of this article.
Theorem 1.1. Assume that Zα={(xαi,vαi,Tαi)}Nαi=1 is a solution to system (1.4). Suppose that (H) holds. It follows that
| minα≠β,i,j‖xαi(t)−xβj(t)‖≥(min1≤α≤n−1d(Iα,Iα+1))t+r02,t∈(0,+∞). | (1.6) |
Theorem 1.2. Assume that Zα={(xαi,vαi,Tαi)}Nαi=1 is a solution to system (1.4). Suppose that (H) holds. Then, it follows that for t∈(0,+∞):
1. (Velocity alignment for each cluster group)
| DV(t)≤DV(0)exp(−Λ0t)+2κ1(n−1)NT∞mΛ0(N−1)exp(−Λ02t)ϕ(r02)+2κ1(n−1)NT∞mΛ0(N−1)ϕ((min1≤α≤n−1d(Iα,Iα+1))t+r02). | (1.7) |
2. (Temperature equilibrium for each cluster group)
| DT(t)≤DT(0)exp(−ˉΛ0t)+2κ2(n−1)NN−1(1T∞m−1T∞M)exp(−ˉΛ02t)ζ(r02)+2κ2(n−1)NN−1(1T∞m−1T∞M)ζ((min1≤α≤n−1d(Iα,Iα+1))t+r02). | (1.8) |
Remark 1.1. It is evident that Theorems 1.1 and 1.2 demonstrate that system (1.4) exhibits the phenomenon of multi-cluster flocking.
Theorem 1.3. Assume that Zα:={(xαi,vαi,Tαi)}Nαi=1 is a solution to system (1.4). Then, under the sufficient frameworks (H), there exist some strictly positive convergence constants V1,V2 and T1,T2 that satisfy the subsequent criteria for t∈(0,+∞).
1. (Velocity convergence value for each cluster group) If we define v∞α:=limt→∞vcenα, then the existence of v∞α is guaranteed, and the two values V1 and V2 satisfy the following inequality for all α∈[n] and iα∈[Nα].
| V1tλ−1≤n∑α=1‖vαiα(t)−v∞α‖≤V2tλ−1,t→∞. | (1.9) |
2. (Temperature convergence value for each cluster group) If we define T∞α:=limt→∞Tcenα, then the existence of T∞α is guaranteed, and the two values T1 and T2 satisfy the following inequality for all α∈[n] and iα∈[Nα].
| T1tμ−1≤n∑α=1‖Tαiα(t)−T∞α‖≤T2tμ−1,t→∞. | (1.10) |
Remark 1.2. In [18], Ahn proved that when the communication weights ϕ and ζ are standard kernels, which are non-negative, bounded, locally Lipschitz continuous, monotonically decreasing, and integrable, the multi-cluster flocking of the system (1.4) is exhibited under some sufficient framework. However, when the communication weights ϕ and ζ are singular kernels, they will blow up as r approaches 0, meaning they will not be bounded and integrable over the interval (0,+∞). In [19], Ahn et al. proved the mono-cluster flocking of system (1.4) under the singular kernel. However, the multi-cluster flocking of system (1.4) under a singular kernel remains unexplored. In this article, by employing a new sufficient framework, we address the non-regularity of the singular kernel at r=0 and obtain the multi-cluster flocking of the system (1.4) under the singular kernels based on the work of [19].
This article is organized as follows. In Section 2, several basic results of the TCSUS model are briefly reviewed initially. Subsequently, some previous results related to the TCSUS model under a singular kernel in [19] are reviewed to prepare for the proof of multi-cluster flocking. In Section 3, several fundamental frameworks for achieving multi-cluster flocking in system (1.4) with a strongly singular kernel are provided, and appropriate dissipative differential inequalities for position, velocity, and temperature are derived. Then, by using self-consistent parameters for these inequalities, we derive sufficient conditions to ensure multi-cluster flocking of system (1.4) based on initial data and system parameters.
This section reviews several basic results for the TCSUS to guarantee its multi-cluster flocking. These estimates will be crucial throughout this paper.
Proposition 2.1. For τ∈(0,+∞), let (X,V,T) be a solution to system (1.4) in the time-interval (0,τ). Then, the following assertions hold:
(1) (Conservation laws): The modulus of velocities and the total sum of temperatures are conserved.
| ddtn∑α=1Nα∑αi=1Tαi(t)=0,||vαi(t)||=1,t∈(0,τ). |
(2) (Monotonicity of temperature): External temperatures Tm(t) and TM(t) are monotonically increasing and decreasing, respectively, and one has positivity and uniform boundedness.
| 0<T∞m≤Tαi(t)≤T∞M,α∈[n],i∈[Nα],t∈[0,τ). |
(3) (Monotonicity of A(v)): If the initial data satisfies that A(v0):=min⟨v0αi,v0βj⟩>0, then A(v) is monotonically increasing: If 0≤s≤t<τ, then 0<A(v0)≤A(v)(s)≤A(v)(t)≤1.
Proof. (1) To demonstrate speed conservation, we take the inner product of the second equation in system (1.4) with 2vαi to obtain
| ⟨2vαi,dvαidt⟩=2κ1N−1Nα∑j=1j≠iϕ(||xαi−xαj||)(⟨vαi,vαj⟩Tαj−⟨vαi,vαj⟩⟨vαi,vαi⟩Tαj||vαi||2)+2κ1N−1∑β≠αNβ∑j=1ϕ(||xαi−xβj||)(⟨vβj,vαi⟩Tβj−⟨vαi,vβj⟩⟨vαi,vαi⟩Tβj||vαi||2)=0. |
This implies that d||vαi||2dt=0, i.e., ||vαi(t)||=||vαi(0)||=1. Then, we employ ζ(||xi−xj||)=ζ(||xj−xi||) and exchange αi↔αj and αi↔βj respectively to get
| ddtn∑α=1Nα∑αi=1Tαi(t)=κ2N−1n∑α=1Nα∑αi=1Nα∑j=1j≠iζ(||xαi−xαj||)(1Tαi−1Tαj)+κ2N−1n∑α=1Nα∑αi=1∑β≠αNβ∑j=1ζ(||xαi−xβj||)(1Tαi−1Tβj),=κ2N−1n∑α=1Nα∑αj=1Nα∑i=1i≠jζ(||xαj−xαi||)(1Tαj−1Tαi)+κ2N−1n∑β=1Nβ∑βj=1∑α≠βNα∑i=1ζ(||xαj−xβi||)(1Tβj−1Tαi)=0. | (2.1) |
(2) We induce that αtit depends on time t∈[0,τ) satisfying Tm(t)=Tαtit(t), and then we have
| dTαtitdt=κ2N−1Nαt∑j=1j≠iζ(||xαtit−xαtj||)⏟>0(1Tαtit−1Tαtj)⏟≥0+κ2N−1∑β≠αtNβ∑j=1ζ(||xαtit−xβj||)⏟>0(1Tαtit−1Tβj)⏟≥0. |
Therefore, dTαtitdt≥0, i.e., Tm(t) is increasing. By the same token, we get that TM(t) is decreasing. This implies that 0<T∞m≤Tαi(t)≤T∞M,α∈[n],i∈[Nα],t∈[0,τ).
(3) We split the proof into two steps:
● First, we show that the functional A(v) is strictly positive in the time interval (0,τ),A(v)>0.
● Second, we verify that in the time interval (0,τ), ddtA(v)≥0.
Step A: For fixed t∈(0,τ), we choose two indices αtit, βtjt (α,β∈[n],i∈[Nα],j∈[Nβ]) such that ⟨vαtit,vβtjt⟩=A(v)(t). Then, we define a temporal set S1 and its supremum τ∗1 as
| S1:={t∈(0,τ)|A(v)(t)>0},τ∗1:=supS1. |
Since A(v0)>0, and A(v) is continuous, the set S1 is an open set, and 0<τ∗1≤τ. Next, we claim τ∗1=τ.
Suppose the contrary holds, i.e., τ∗1<τ, which implies A(v)(τ∗1−0)=0. We differentiate A(v) with respect to time t∈(0,τ∗1) to find
| ddtA(v)=⟨˙vαtit,vβtjt⟩+⟨vαtit,˙vβtjt⟩=κ1N−1Nαt∑j=1j≠itϕ(||xαtit−xαj||)(⟨vαj,vβtjt⟩−⟨vαtit,vαj⟩⟨vαtit,vβtjt⟩Tαtj)+κ1N−1∑β≠αtNβ∑j=1ϕ(||xαtit−xβj||)(⟨vβtjt,vβj⟩−⟨vαtit,vβj⟩⟨vαtit,vβtjt⟩Tβj)+κ1N−1Nβt∑j=1j≠jtϕ(||xβtjt−xβtj||)(⟨vαtitvβtj⟩−⟨vβtjt,vβtj⟩⟨vαtitvβtjt⟩Tβtj)+κ1N−1∑β≠βtNβ∑j=1ϕ(||xβtjt−xβj||)(⟨vαtitvβj⟩−⟨vβtjt,vβj⟩⟨vαtitvβtjt⟩Tβj). | (2.2) |
For any vαi,vβj which are the components of V, the unit-speed constraint yields
| |⟨vαi,vβj⟩|≤||vαi||⋅||vβj||≤1. |
Thus, the positivity and minimality of A(v) lead to
| ⟨vγk,vβtjt⟩≥A(v):=⟨vαtit,vβtjt⟩≥⟨vαtit,vβtjt⟩⟨vαtit,vγk⟩ |
and
| ⟨vγk,vαtit⟩≥A(v):=⟨vαtit,vβtjt⟩≥⟨vαtit,vβtjt⟩⟨vβtjt,vγk⟩,∀γ∈[n]. |
Since each temperature is bounded below by a positive constant, each summand of Eq (2.2) is non-negative, and one has ddtA(v)≥0,t∈(0,τ∗1). Therefore, A(v)(τ∗1−0)≥A(v)(0)>0, which is contradictory to A(v)(τ∗1−0)=0. Finally, we have τ∗1=τ and A(v)>0,t∈(0,τ).
Step B: It follows from Eq (2.2) that ddtA(v)≥0,t∈(0,τ).
Remark 2.1. Based on Proposition 2.1, it can be immediately inferred that the system (1.4) can be simplified into the following system:
| {dxαidt=vαi,t>0,i∈[Nα]:={1,2,⋯,Nα},α∈[n]:={1,2,⋯n},n≥3,dvαidt=κ1N−1Nα∑j=1j≠iϕ(||xαi−xαj||)(vαj−⟨vαi,vαj⟩vαiTαj)+κ1N−1∑β≠αNβ∑j=1ϕ(||xαi−xβj||)(vβj−⟨vαi,vβj⟩vαiTβj)dTαidt=κ2N−1Nα∑j=1j≠iζ(||xαi−xαj||)(1Tαi−1Tαj)+κ2N−1∑β≠αNβ∑j=1ζ(||xαi−xβj||)(1Tαi−1Tβj),(xαi(0),vαi(0),Tαi(0))=(x0αi,v0αi,T0αi)∈Rd×Sd−1×(0,+∞). |
In this subsection, we will give some previous results about the mono-cluster flocking of system (1.3) under a singular kernel. These results are necessary for later sections.
Definition 2.1. We suppose that t0∈(0,+∞) is the first collision time of the system (1.3) ensemble, and the l−th particle is one of the such colliding particles at time t0. Then, we denote by [l] the collection of all particles colliding with the l−th particle at time t0,
| [l]:={i∈[N]|limt→t0−||xi(t)−xl(t)||=0}. |
For ∀t∈[0,t0) and ∀i∉[l], we define the constant δ such that δ is a strictly positive real number satisfying ||xl(t)−xi(t)||≥δ>0. Then, we define the following L∞− diameters as follows:
| DX,[l]:=maxi,j∈[l]||xi−xj||,DV,[l]:=maxi,j∈[l]||vi−vj||,A[l](v):=mini,j∈[l]⟨vi,vj⟩. |
Proposition 2.2. [19] Let (X,V,T) be a solution to system (1.3). If A(v0)>0, then sub-ensemble diameters satisfy the following system of dissipative differential inequalities: For a.e. t∈(0,t0),
| {|ddtDX,[l]|≤DV,[l],t>0,ddtDV,[l]≤−κ1|[l]|A[l](v0)(N−1)T∞Mϕ(DX,[l])DV,[l]+4κ1(N−|[l]|)ϕ(δ)(N−1)T∞m,t>0,dDTdt≤κ2(N−2)ζ(DX)(N−1)(T∞M)2DT. | (2.3) |
Proposition 2.3 (Collision avoidance). [19] We suppose that communication weight and initial data satisfy λ>1,A(v0)>0,min1≤i≠j≤N||xi(0)−xj(0)||>0, and let (X,V,T) be a solution to the system (1.3). Then, collision avoidance occurs, i.e., xi(t)≠xj(t) (i≠j,i,j∈[N],t≥0).
Proposition 2.4. [19] We suppose that communication weight and initial data satisfy the following conditions:
(1) The parameter λ and initial configuration satisfy λ>1,A(v0)>0,min1≤i≠j≤N||xi(0)−xj(0)||>0.
(2) If there exists a positive constant D∞X such that DX(0)+DV(0)T∞Mκ1A(v0)ϕ(D∞X)<D∞X and (X,V,T) is a solution to system (1.3), then thermodynamic flocking emerges asymptotically:
(ⅰ) sup0≤t<+∞DX(t)≤D∞X, DV(t)≤DV(0)exp(−κ1A(v0)ϕ(D∞X)T∞M).
(ⅱ) DT(t)≤DT(0)exp(−κ2ζ(D∞X)(N−2)|T∞M|2(N−1)).
(ⅲ) (A uniform positive lower bound for relative distances) We suppose that DV(0)≤κ1A(v0)T∞M∫D∞XDX(0)ϕ(s)ds holds, and (X,V,T) is a global solution of the system (1.3). Then, there exists a strictly positive lower bound for the relative spatial distances, i.e., δ0:=inf0≤t≤∞min1≤i≠j≤N||xi(t)−xj(t)||>0.
In this section, we derive suitable dissipative differential inequalities initially with respect to position, velocity, and temperature. By employing a bootstrapping technique with these inequalities, we apply appropriate sufficient conditions based on the initial conditions and system parameters to ensure multi-cluster flocking within system (1.4).
In the following, we derive several dissipative differential inequalities with respect to position-velocity-temperature to establish adequate frameworks based on system parameters and initial conditions.
Lemma 3.1 (Dissipative structure). Assume that Zα={(xαi,vαi,Tαi)}Nαi=1 is a solution to the system (1.4). We define ϕM(t):=maxα≠β,i,jϕ(‖xβj−xαi‖) and ζM(t):=maxα≠β,i,jζ(‖xβj−xαi‖).
Then, we have the following three differential inequalities for a.e. t∈(0,+∞):
1.|dDXdt|≤DV,
2.dDTdt≤−κ2(min(N1,⋯,Nα)−2)ζ(DX)(N−1)(T∞M)2DT+2κ2(n−1)NN−1ζM(1T∞m−1T∞M),
3.dDVdt≤−κ1min(N1,…,Nα)A(v0)ϕ(DX)(N−1)T∞MDV+2κ1(n−1)NϕM(N−1)T∞m.
Proof. The first assertion follows directly from the Cauchy-Schwarz inequality. To prove the second assertion, we select two indices, Mt and mt depending on t, such that
| DTα(t)=TαMt(t)−Tαmt(t),1≤mt,Mt≤Nα. |
Then, for a.e. t∈(0,+∞), one can show that by using the definitions of Mt and mt,
| dDTαdt=κ2N−1Nα∑j=1j≠iζ(‖xαMt−xαj‖)(1TαMt−1Tαj)−κ2N−1Nα∑j=1j≠iζ(‖xαmt−xαj‖)(1Tαmt−1Tαj)+κ2N−1∑β≠αNβ∑j=1ζ(‖xαMt−xβj‖)(1TαMt−1Tβj)−κ2N−1∑β≠αNβ∑j=1ζ(‖xαmt−xβj‖)(1Tαmt−1Tβj)=:I1+I2+I3+I4. |
(ⅰ) (Estimate of I1+I2) In the same method as the proof of Proposition 2.2, the following inequality holds for a.e. t∈(0,+∞):
| I1+I2≤−κ2(Nα−2)ζ(DXα)(N−1)(T∞M)2DTα. |
(ⅱ) (Estimate of I3+I4) From Proposition 2.1 and the definitions of ζM and ζm, we derive the following inequality for a.e. t∈(0,+∞):
| I3+I4≤κ2N−1|∑β≠αNβ∑j=1ζ(‖xαMt−xβj‖)(1TαMt−1Tβj)|+κ2N−1|∑β≠αNβ∑j=1ζ(‖xαmt−xβj‖)(1Tαmt−1Tβj)|≤2κ2(N−Nα)ζMN−1(1T∞m−1T∞M). |
Thus, combining I1+I2 and I3+I4 yields that, for a.e. t∈(0,+∞),
| dDTαdt≤−κ2(Nα−2)ζ(DXα)(N−1)(T∞M)2DTα+2κ2(N−Nα)ζMN−1(1T∞m−1T∞M). |
Therefore, summing for α from 1 to n to the above inequality, we obtain that for a.e. t∈(0,+∞),
| dDTdt≤−κ2(min(N1,⋯,Nα)−2)ζ(DX)(N−1)(T∞M)2DT+2κ2(n−1)NN−1ζM(1T∞m−1T∞M). |
To verify the third assertion, we select two indices Mt and mt depending on t which satisfy
| DVα(t)=‖vαMt(t)−vαmt(t)‖,1≤mt,Mt≤Nα. |
Hence, we attain that for a.e. t∈(0,+∞),
| 12dD2Vαdt=⟨vαMt−vαmt,˙vαMt−˙vαmt⟩=⟨vαMt−vαmt,κ1N−1Nα∑j=1ϕαMtj((vαj−⟨vαMt,vαj⟩vαMt)Tαj)−κ1N−1Nα∑j=1ϕαmtj((vαj−⟨vαmt,vαj⟩vαmt)Tαj)⟩+⟨vαMt−vαmt,κ1N−1∑β≠αNα∑j=1ϕ(||xαMt−xβj||)((vβj−⟨vαMt,vβj⟩vαMt)Tβj)−κ1N−1∑β≠αNα∑j=1ϕ(||xαmt−xβj||)((vβj−⟨vαmt,vβj⟩vαmt)Tβj)⟩=:J1+J2. |
(iii) (Estimate of J1) Replacing [l] with [Nα] and in the same method as the proof of Proposition 2.2, for a.e.t∈(0,+∞), we have
| J1≤−κ1NαA(v0)(N−1)T∞Mϕ(DXα)D2Vα. |
(iv) (Estimate of J2) We employ the identities
| ||vβj−⟨vαMt,vβj⟩vαMt||≤1,||vβj−⟨vαmt,vβj⟩vαmt||≤1 |
with the Cauchy-Schwarz inequality and Proposition 2.3 to estimate that for a.e. t∈(0,+∞),
| J2≤κ1DVαN−1||∑β≠αNβ∑j=1ϕ(||xαMt−xβj||)(vβj−⟨vαMt,vβj⟩vαMtTβj)||+κ1DVαN−1||∑β≠αNβ∑j=1ϕ(||xαmt−xβj||)(vβj−⟨vαmt,vβj⟩vαmtTβj)||≤2κ1(N−Nα)ϕMDVα(N−1)T∞m. |
Then, we combine J1 and J2 to derive that for a.e. t∈(0,+∞),
| dDVαdt≤−κ1NαA(v0)(N−1)T∞Mϕ(DXα)DVα+2κ1(N−Nα)ϕM(N−1)T∞m. |
Summing the above inequality from α=1 to n, we obtain that
| dDVdt≤−κ1min(N1,…,Nα)A(v0)ϕ(DX)(N−1)T∞MDV+2κ1(n−1)NϕM(N−1)T∞m, |
since the monotonicity of ϕ implies that min(ϕ(DX1),…,ϕ(DXα))≥ϕ(DX). Finally, we demonstrate the third assertion.
The proofs of Theorems 1.1–1.3 are presented in this subsection. First of all, we give a brief comment regarding (H).
The assumption (H1) is the sufficient condition which guarantees group formation within each cluster. The assumption (H2) implies that the initial positions for each cluster group should be sufficiently separated from each other to achieve a multi-cluster flocking result. In fact, if vkαi(0) is covered by Iα:=[aα,bα], then we can take sufficiently small κ1 such that [vkαi(0)−Λα,vkαi(0)+Λα]⊂Iα because Λα is linearly proportional to κ1.
The assumption (H3) ensures that a uniformly strictly positive lower bound exists for relative distances. Here, we can find the admissible data meeting the assumption (H3) requirements when κ1 is sufficiently small. Moreover, under sufficiently large r0, suitable temperature initial data and small coupling strength regime, we can check that the sufficient framework (H) is admissible data.
Lemma 3.2. Assume that Zα={(xαi,vαi,Tαi)}Nαi=1 is a solution to the system (1.4) and suppose that (H) holds. We define the following set:
| S2:={s>0|minα≠β,i,j||xαi(t)−xβj(t)||≥(min1≤α≤n−1d(Iα,Iα+1))t+r02,t∈[0,s)}. |
Then, S2 is nonempty, and it follows that DX(t)≤D∞X,t∈[0,T∗], where T∗:=supS2.
Proof. We observe that S2 is nonempty due to the assumption (H2) and the continuity of ||xαi(t)−xβj(t)||. Then, we just need to prove DX(t)≤D∞X,t∈[0,T∗]. First of all, we consider the following set:
| S3:={s>0∣∀t∈[0,s],DX(t)≤D∞X,s≤T∗}. | (3.1) |
We set supS3=:T∗∗. Then, we have DX(T∗∗)=D∞X and suppose that T∗∗<T∗ for the proof by contradiction. Then, for ∀t∈[0,T∗∗], one has
| −κ1min(N1,⋯,Nα)ϕ(DX)(N−1)T∞M≤−κ1min(N1,⋯,Nα)ϕ(D∞X)(N−1)T∞M. | (3.2) |
Thus, for a.e. t∈(0,T∗∗), the second assertion of Lemma 3.1 and the above estimates lead to the following inequalities:
| dDVdt≤−κ1min(N1,⋯,Nα)A(v0)ϕ(DX)(N−1)T∞MDV+2κ1(n−1)NϕM(N−1)T∞m≤−κ1min(N1,⋯,Nα)A(v0)ϕ(D∞X)(N−1)T∞MDV+2κ1(n−1)NϕM(N−1)T∞m=−Λ0DV+2κ1(n−1)NϕM(N−1)T∞m. | (3.3) |
For t∈[0,T∗∗], we integrate inequality (3.3) from time 0 to t through multiplying both sides of the inequality by the integral factor exp(Λ0t).
| DV(t)≤DV(0)exp(−Λ0t)+∫t02κ1(n−1)NϕM(N−1)T∞mexp(Λ0(s−t))ds=DV(0)exp(−Λ0t)+(∫t20+∫tt2)2κ1(n−1)NϕM(N−1)T∞mexp(Λ0(s−t))ds≤DV(0)exp(−Λ0t)+2κ1(n−1)N(N−1)Λ0T∞mϕ(r02)[exp(−Λ02t)−exp(−Λ0t)]+2κ1(n−1)N(N−1)Λ0T∞mϕ((min1≤α≤n−1d(Iα,Iα+1))t+r02)[1−exp(−Λ02t)]≤DV(0)exp(−Λ0t)+2κ1(n−1)N(N−1)Λ0T∞mϕ(r02)exp(−Λ02t)+2κ1(n−1)N(N−1)Λ0T∞mϕ((min1≤α≤n−1d(Iα,Iα+1))t+r02), | (3.4) |
where we used the definition of S3 and the fact that ϕM≤ϕ((min1≤α≤n−1d(Iα,Iα+1))t+r02).
In the latter case, we estimate from inequality (3.4) that for t∈[0,T∗∗],
| DX(t)≤DX(0)+∫t0DV(s)ds≤DX(0)+∫t0[DV(0)exp(−Λ0s)+2κ1N(n−1)(N−1)T∞mΛ0exp(−Λ02s)ϕ(r02)+2κ1N(n−1)(N−1)T∞mΛ0ϕ((min1≤α≤n−1d(Iα,Iα+1))s+r0)2)]ds<DX(0)+Λ≤D∞X. | (3.5) |
Accordingly, DX(T∗∗)<D∞X, which is contradictory to DX(T∗∗)=D∞X. Finally, supS3=T∗∗=T∗. We have reached the desired lemma.
Proof of Theorem 1.1. Following Lemma 3.2, we just need to prove that T∗=∞, which is equivalent to
| minα≠β,i,j‖xαi(t)−xβj(t)‖≥(min1≤α≤n−1d(Iα,Iα+1))t+r02,t∈(0,+∞). | (3.6) |
For the proof by contradiction, we suppose that T∗<∞. From the definition of S2, we select four indices that satisfy
| 1≤α∗<β∗≤n,i∗∈{1,⋯,Nα∗} and j∗∈{1,⋯,Nβ∗} | (3.7) |
such that
| ‖xα∗i∗(T∗)−xβ∗j∗(T∗)‖=(min1≤α≤n−1d(Iα,Iα+1))T∗+r02. | (3.8) |
Then, we show that for the k∈{1,⋯,d} chosen in(H0),
| ‖xα∗i∗(T∗)−xβ∗j∗(T∗)‖≥xkβ∗j∗(T∗)−xkαi∗(T∗)=xkβ∗j∗(0)−xkα∗i∗(0)+∫T∗0(vkβ∗j∗(t)−vkα∗i∗(t))dt≥r0+∫T∗0(vkβ∗j∗(t)−vkα∗i∗(t))dt. |
From the third assertion of Proposition 2.3, we set a positive number δ0 such that δ0:=inf0≤t≤∞min1≤i≠j≤N||xi(t)−xj(t)||>0.
Next, we integrate the second equation of system (1.4) and employ the following relation:
| 1−⟨vαi,vαj⟩=||vαi−vαj||22 |
and
| ‖vαj−⟨vαi,vαj⟩vαi‖2=1−⟨vαi,vαj⟩2=(1−⟨vαi,vαj⟩)(1+⟨vαi,vαj⟩)≤D2Vα |
to attain that for t∈[0,T∗],
| |vkαi(t)−vkαi(0)|≤‖vαi(t)−vαi(0)‖≤∫t0‖˙vαi‖ds≤κ1(Nα−1)ϕ(δ0)(N−1)T∞m∫t0DVα(s)ds+κ1(N−Nα)(N−1)T∞m∫t0ϕM(s)ds≤κ1(Nα−1)ϕ(δ0)(N−1)T∞mDVα(s)ds+κ1(N−Nα)(N−1)T∞m∫∞0ϕ(min1≤α≤n−1d(Iα,Iα+1)s+r02)ds≤κ1(Nα−1)ϕ(δ0)(N−1)T∞mDV(s)ds+κ1(N−Nα)(N−1)T∞m∫∞0ϕ(min1≤α≤n−1d(Iα,Iα+1)s+r02)ds≤κ1(Nα−1)ϕ(δ0)(N−1)T∞mΛ+κ1(N−Nα)(N−1)T∞m∫∞0ϕ(min1≤α≤n−1d(Iα,Iα+1)s+r02)ds=κ1(Nα−1)ϕ(δ0)(N−1)T∞mΛ+κ1(N−Nα)(N−1)T∞m(min1≤α≤n−1d(Iα,Iα+1))∫∞r02ϕ(s)ds=:Λα, |
where we used ϕ≤ϕ(δ0), ‖vβj−⟨vαi,vβj⟩vαi‖≤1, and Λ was estimated in inequality (3.5). Therefore, it follows by (H2) that for α=1,⋯,n,
| vkαi(0)+Λα≥vkαi(0)+|vkαi(t)−vkαi(0)|≥vkαi(t)=vkαi(0)+vkαi(t)−vkαi(0)≥vkαi(0)−|vkαi(t)−vkαi(0)|≥vkαi(0)−Λα⟹vkαi(t)∈Iα. |
By using the assumption (H2), we derive that
| ‖xα∗i∗(T∗)−xβ∗j∗(T∗)‖≥r0+∫T∗0(vkβ∗j∗(t)−vkα∗i∗(t))dt>r02+min1≤α≤n−1d(Iα,Iα+1)T∗, |
which gives a contradiction to T∗<∞. Consequently, we conclude that T∗=∞. Subsequently, we claim that T∗=∞, which is crucial to derive the multi-cluster flocking estimate of the system (1.4).
Proof of Theorem 1.2. We apply the second assertion of Lemma 3.1, the definition of the set S2, and Theorem 1.1 to have that for a.e. t∈(0,+∞),
| dDVdt≤−Λ0DV+2κ1(n−1)NT∞m(N−1)ϕM≤−Λ0DV+2κ1(n−1)NT∞m(N−1)ϕ(r02+min1≤α≤n−1d(Iα,Iα+1)t). | (3.9) |
Similar to inequality (3.4), we recall that for t∈(0,+∞),
| DV(t)≤DV(0)exp(−Λ0t)+2κ1(n−1)NT∞mΛ0(N−1)exp(−Λ02t)ϕ(r02)+2κ1(n−1)NT∞mΛ0(N−1)ϕ((min1≤α≤n−1d(Iα,Iα+1))t+r02). | (3.10) |
Hence, we reach the desired first assertion.
To prove the second assertion, we employ the third assertion of Lemma 3.1 and Theorem 1.1 to get that for t∈(0,+∞),
| dDTdt≤−κ2(min(N1,⋯,Nα)−2)ζ(DX)(N−1)(T∞M)2DT+2κ2(n−1)NN−1ζM(1T∞m−1T∞M)≤−ˉΛ0DT+2κ2(n−1)NN−1(1T∞m−1T∞M)ζ((min1≤α≤n−1d(Iα,Iα+1))t+r02). | (3.11) |
We use Gronwall's lemma to yield that for t∈(0,+∞),
| DT(t)≤DT(0)exp(−ˉΛ0t)+∫t02κ2(n−1)NζMN−1(1T∞m−1T∞M)exp(ˉΛ0(s−t))ds=DT(0)exp(−ˉΛ0t)+(∫t20+∫tt2)2κ2(n−1)NζMN−1(1T∞m−1T∞M)exp(ˉΛ0(s−t))ds≤DT(0)exp(−ˉΛ0t)+2κ2(n−1)NN−1(1T∞m−1T∞M)ζ(r02)[exp(−ˉΛ02t)−exp(−ˉΛ0t)]+2κ2(n−1)NN−1(1T∞m−1T∞M)ζ((min1≤α≤n−1d(Iα,Iα+1))t+r02)[1−exp(−ˉΛ02t)]≤DT(0)exp(−ˉΛ0t)+2κ2(n−1)NN−1(1T∞m−1T∞M)exp(−ˉΛ02t)ζ(r02)+2κ2(n−1)NN−1(1T∞m−1T∞M)ζ((min1≤α≤n−1d(Iα,Iα+1))t+r02). | (3.12) |
We conclude the desired second assertion.
As a direct consequence, we present the following result that the velocity and temperature of each agent in each cluster group converge to some same non-negative value, respectively. We prove the following lemma at first.
Lemma 3.3. Assume that Zα={xαi,vαi,Tαi}Nαi=1 is a solution to the system (1.4). Each local average (xcenα,νcenα,Tcenα) then satisfies the following relations:
| {dxcenαdt=vcenα,t>0,α∈{1,⋯,n},n≥3,Nα˙vcenα=κ1N−1∑1≤i≠j≤Nαϕ(‖xαi−xαj‖)vαi‖vαj−vαi‖22Tαj+κ1N−1∑β≠αNα∑i=1Nβ∑j=1ϕ(‖xαi−xβj‖)(vβj−vαi+vαi‖vαj−vαi‖22)1Tβj,Nα˙Tcenα=κ2N−1∑β≠αNα∑i=1Nβ∑j=1ζ(‖xαi−xβj‖)(1Tαi−1Tβj). | (3.13) |
Proof. The first assertion is trivial. For the second assertion, we take ∑Nαi=1 to ˙vαi and use the standard trick of interchanging i and j to obtain that
| ‖vαi−vαj‖22=12⟨vαi−vαj,vαi−vαj⟩=12(⟨vαi,vαi⟩+⟨vαj,vαj⟩−2⟨vαi,vαj⟩)=1−⟨vαi,vαj⟩. | (3.14) |
Therefore, we have
| Nα˙vcenα=κ1N−1∑1≤i≠j≤Nαϕ(||xαi−xαj||)(vαj−vαi+vαi−⟨vαi,vαj⟩vαiTαj)+κ1N−1∑β≠αNα∑i=1Nβ∑j=1ϕ(||xαi−xβj||)(vβj−vαi+vαi−⟨vαi,vβj⟩vαiTβj)=κ1N−1∑1≤i≠j≤Nαϕ(‖xαi−xαj‖)(vαj−vαi+vαi‖vαj−vαi‖22)1Tαj+κ1N−1∑β≠αNα∑i=1Nβ∑j=1ϕ(‖xαi−xβj‖)(vβj−vαi+vαi‖vαj−vαi‖22)1Tβj=κ1N−1∑1≤i≠j≤Nαϕ(‖xαi−xαj‖)vαi‖vαj−vαi‖22Tαj+κ1N−1∑β≠αNα∑i=1Nβ∑j=1ϕ(‖xαi−xβj‖)(vβj−vαi+vαi‖vαj−vαi‖22)1Tβj. | (3.15) |
For the third assertion, we take ∑Nαi=1 to ˙Tαi and again use the standard trick as above. Finally, we prove the lemma.
Proof of Theorem 1.3. According to Lemma 3.3,
| Nα˙vcenα=κ1N−1∑1≤i≠j≤Nαϕ(‖xαi−xαj‖)vαi‖vαj−vαi‖22Tαj+κ1N−1∑β≠αNα∑i=1Nβ∑j=1ϕ(‖xαi−xβj‖)(vβj−vαi+vαi‖vβj−vαi‖22)1Tβj, | (3.16) |
and thus we have
| vcenα(t)=vcenα(0)+κ1(N−1)Nα∑1≤i≠j≤Nα∫t0ϕ(‖xαi−xαj‖)vαi‖vαj−vαi‖22Tαjds+κ1(N−1)Nα∑β≠αNα∑i=1Nβ∑j=1∫t0ϕ(‖xαi−xβj‖)(vβj−vαi+vαi‖vβj−vαi‖22)1Tβjds. | (3.17) |
For ∀t1,t2∈(0,+∞), we have
| ‖vcenα(t2)−vcenα(t1)‖≤κ1(N−1)Nα∑1≤i≠j≤Nα∫t2t1ϕ(‖xαi−xαj‖)‖vαi‖⋅‖vαj−vαi‖22Tαjds+κ1(N−1)Nα∑β≠αNα∑i=1Nβ∑j=1∫t2t1ϕ(‖xαi−xβj‖)(‖vβj−vαi‖+‖vαi‖⋅‖vβj−vαi‖22)1Tβjds≤κ1(N−1)Nα∑1≤i≠j≤Nα∫t2t1ϕ(δ0)D2V2T∞mds+κ1(N−1)Nα∑β≠αNα∑i=1Nβ∑j=1∫t2t1ϕ(‖xαi−xβj‖)√2+1T∞mds≤Cκ1ϕ(δ0)2T∞m(N−1)Nα∑1≤i≠j≤Nα∫t2t1ϕ2((min1≤α≤n−1d(Iα,Iα+1))s+r02)ds+(√2+1)κ1T∞m(N−1)Nα∑β≠αNα∑i=1Nβ∑j=1∫t2t1ϕ((min1≤α≤n−1d(Iα,Iα+1))s+r02)ds. | (3.18) |
By employing the Cauchy convergence criterion and the existence of ∫∞0ϕ((min1≤α≤n−1d(Iα,Iα+1))s+r02)ds and ∫∞0ϕ2((min1≤α≤n−1d(Iα,Iα+1))s+r02)ds, it is straightforward to observe that ‖vcenα(t2)−vcenα(t1)‖ can be arbitrarily small when both t1 and t2 are sufficiently large. Therefore, the existence of limt→∞vcenα(t) is guaranteed.
By employing v∞α:=limt→∞vcenα(t) and
| vcenα=vcenα(0)+κ1(N−1)Nα∑1≤i≠j≤Nα∫t0ϕ(‖xαi−xαj‖)vαi‖vαj−vαi‖22Tαjds+κ1(N−1)Nα∑β≠αNα∑i=1Nβ∑j=1∫t0ϕ(‖xαi−xβj‖)(vβj−vαi+vαi‖vβj−vαi‖22)1Tβjds, |
we have that
| ‖vcenα(t)−v∞α‖≤κ1(N−1)Nα∑1≤i≠j≤Nα∫∞tϕ(‖xαi−xαj‖)‖vαi‖⋅‖vαj−vαi‖22Tαjds+κ1(N−1)Nα∑β≠αNα∑i=1Nβ∑j=1∫∞tϕ(‖xαi−xβj‖)(‖vβj−vαi‖+‖vαi‖⋅‖vβj−vαi‖22)1Tβjds. | (3.19) |
Then, the multi-flocking estimate studied in Theorem 1.1 and Theorem 1.2 and the monotonicity and non-negativity of ϕ imply that
| ‖vcenα(t)−v∞α‖≤O(∫∞tϕ((min1≤α≤n−1d(Iα,Iα+1))s+r02)ds)≤O(1)1tλ−1→0,t→∞. | (3.20) |
Drawing from from Theorem 1.1 and Theorem 1.2, we observe that
| ‖vαi(t)−vcenα(t)‖=O(exp(−Λ02t)+ϕ((min1≤α≤n−1d(Iα,Iα+1))s+r02))≤O(1)1tλ,t→∞. | (3.21) |
We combine the above estimates to derive that for all α∈[n] and i∈[Nα],
| ‖vαi(t)−v∞α‖≤‖vcenα(t)−v∞α‖+‖vαi(t)−vcenα(t)‖=O(1)1tλ−1+O(1)1tλ≤O(1)1tλ−1,t→∞. | (3.22) |
Conversely, it is evident that for ∀α,β∈[n], and ∀i∈[Nα],j∈[Nβ],
| ‖xαi−xβj‖≤‖xαi(0)−xβj(0)‖+∫t0‖vαi−vβj‖dt≤R0+∫t0DV(s)ds≤R0+(DV(0)+C0)t, | (3.23) |
where C0:=4κ1(n−1)NT∞mΛ0(N−1)ϕ(r02). Therefore, the multi-flocking estimate studied in Theorem 1.2 and the monotonicity and non-negativity of ϕ imply that for ∀α∈[Nα]
| ‖vcenα(t)−v∞α‖≥O(∫∞tϕ(R0+(DV(0)+C0)t)ds−exp(−Λ0t))≥O(1)1tλ−1→0,t→∞. | (3.24) |
Then, we combine the above estimates to derive that for all α∈[n] and i∈[Nα],
| ‖vαi(t)−v∞α‖≥‖vcenα(t)−v∞α‖−‖vαi(t)−vcenα(t)‖=O(1)1tλ−1−O(1)1tλ≥O(1)1tλ−1,t→∞. | (3.25) |
Finally, there exist 2n strictly positive values Vα1,Vα2 such that
| Vα1tλ−1≤‖vαi(t)−v∞α‖≤Vα2tλ−1,α∈[n],i∈[Nα]. | (3.26) |
Therefore, there exist two strictly positive values V1,V2 such that for all α∈[n] and iα∈[Nα],
| V1tλ−1≤n∑α=1‖vαiα(t)−v∞α‖≤V2tλ−1,t→∞. | (3.27) |
Similar to the previous proof, the existence of T∞α can be demonstrated, and there exist two positive values T1 and T2 such that for all α∈[n] and iα∈[Nα],
| T1tμ−1≤n∑α=1‖Tαiα(t)−T∞α‖≤T2tμ−1,t→∞. | (3.28) |
We conclude the desired results.
This study provides proof for the fundamental properties and multi-cluster flocking behaviors of the TCSUS system (1.4) under a singular kernel.
Specifically, Propositions 2.1–2.4 establish the foundational characteristics of the TCSUS model and present essential findings that facilitate the investigation of multi-cluster flocking within the TCSUS framework. Lemma 3.1 establishes the dissipative structure of the TCSUS system as derived from its configuration.
Subsequently, the bootstrapping technique is utilized to derive the multi-cluster flocking outcome within a finite time interval. Furthermore, in Theorem 1.1, by enforcing particular initial velocity conditions and applying bootstrapping methods, we ascertain that the divergence rate of distinct clusters is bounded below by a linear function of time.
Theorem 1.2 provides estimates of the position-velocity-temperature L∞-diameters for all cluster groups by using Gronwall inequalities. Consequently, it is also demonstrated that the velocities and temperatures of all clusters converge to common values, respectively.
Lemma 3.3 establishes the differential equalities for the central velocity and temperature of a cluster, derived by summing the velocities and temperatures of its constituent particles. Finally, Theorem 1.3 provides the convergence values for velocity and temperature within each cluster group by asserting Lemma 3.3 and Theorem 1.2.
Shenglun Yan: Methodology, analysis, calculation, and writing original draft; Wanqian Zhang: Discussion, review and editing; Weiyuan Zou: Supervision, validation, and revision.
The authors declare they have not used Artificial Intelligence (AI) tools in the creation of this article.
The work of Shenglun Yan was supported by the Innovation and Entrepreneurship Projects for College Students in Beijing University of Chemical Technology (X202410010342), and the work of Weiyuan Zou was supported by the National Natural Science Foundation of China (NSFC)12001033.
The authors declare no conflict of interest.
| [1] | S. A. Alowais, S. S. Alghamdi, N. Alsuhebany, T. Alqahtani, A. I. Alshaya, S. N. Almohareb, et al., Revolutionizing healthcare: The role of artificial intelligence in clinical practice, BMC Med. Educ., 23 (2023), 689. |
| [2] |
D. Saligkaras, V. E. Papageorgiou, On the detection of patterns in electricity prices across European countries: An unsupervised machine learning approach, AIMS Energy, 10 (2022), 1146–1164. https://doi.org/10.3934/energy.2022054 doi: 10.3934/energy.2022054

|
| [3] |
D. Saligkaras, V. E. Papageorgiou, Seeking the truth beyond the data. An unsupervised machine learning approach, AIP Conf. Proc., 2812 (2023), 020106. https://doi.org/10.1063/5.0161454 doi: 10.1063/5.0161454
|
| [4] |
S. S. Kshatri, D. Singh, Convolutional neural network in medical image analysis: A review, Arch. Comput. Methods Eng., 30 (2023), 2793–2810. https://doi.org/10.1007/s11831-023-09898-w doi: 10.1007/s11831-023-09898-w
|
| [5] |
K. Zou, Z. Chen, X. Yuan, X. Shen, M. Wang, H. Fu, A review of uncertainty estimation and its application in medical imaging, Meta-Radiol., 1 (2023), 100003. https://doi.org/10.1016/j.metrad.2023.100003 doi: 10.1016/j.metrad.2023.100003
|
| [6] |
L. Huang, S. Ruan, Y. Xing, M. Feng, A review of uncertainty quantification in medical image analysis: Probabilistic and non-probabilistic methods, Med. Image Anal., 97 (2024), 103223. https://doi.org/10.1016/j.media.2024.103223 doi: 10.1016/j.media.2024.103223
|
| [7] |
M. M. Jassim, Systematic review for lung cancer detection and lung nodule classification: Taxonomy, challenges, and recommendation future works, J. Intell. Syst., 31 (2022), 944–964. https://doi.org/10.1515/jisys-2022-0062 doi: 10.1515/jisys-2022-0062
|
| [8] |
H. Sung, J. Ferlay, R. L. Siegel, M. Laversanne, I. Soerjomataram, A. Jemal, et al., Global cancer statistics 2020: GLOBOCAN estimates of incidence and mortality worldwide for 36 cancers in 185 countries, CA Cancer J. Clin., 71 (2021), 209–249. https://doi.org/10.3322/caac.21660 doi: 10.3322/caac.21660
|
| [9] |
G. Savarese, P. M. Becher, L. H. Lund, P. Seferovic, G. M. C. Rosano, A. J. S. Coats, Global burden of heart failure: A comprehensive and updated review of epidemiology, Cardiovasc. Res., 119 (2023), 1453. https://doi.org/10.1093/cvr/cvad026 doi: 10.1093/cvr/cvad026
|
| [10] |
A. Inamdar, A. Inamdar, Heart failure: Diagnosis, management and utilization, J. Clin. Med., 5 (2016), 62. https://doi.org/10.3390/jcm5070062 doi: 10.3390/jcm5070062
|
| [11] |
L. Li, J. Chang, A. Vakanski, Y. Wang, T. Yao, M. Xian, Uncertainty quantification in multivariable regression for material property prediction with Bayesian neural networks, Sci. Rep., 14 (2024), 1783. https://doi.org/10.1038/s41598-024-61189-x doi: 10.1038/s41598-024-61189-x
|
| [12] |
A. Olivier, M. D. Shields, L. Graham-Brady, Bayesian neural networks for uncertainty quantification in data-driven materials modeling, Comput. Methods Appl. Mech. Eng., 386 (2021), 114079. https://doi.org/10.1016/j.cma.2021.114079 doi: 10.1016/j.cma.2021.114079
|
| [13] |
M. Malmström, I. Skog, D. Axehill, F. Gustafsson, Uncertainty quantification in neural network classifiers—A local linear approach, Automatica, 163 (2024), 111563. https://doi.org/10.1016/j.automatica.2024.111563 doi: 10.1016/j.automatica.2024.111563
|
| [14] | A. Kendall, Y. Gal, What uncertainties do we need in Bayesian deep learning for computer vision?, Adv. Neural Inf. Process. Syst., 30 (2017). |
| [15] |
J. Gawlikowski, C. R. N. Tassi, M. Ali, J. Lee, M. Humt, J. Feng, et al., A survey of uncertainty in deep neural networks, Artif. Intell. Rev., 56 (2023), 1513–1589. https://doi.org/10.1007/s10462-023-10562-9 doi: 10.1007/s10462-023-10562-9
|
| [16] | B. Lakshminarayanan, A. Pritzel, C. Blundell, Simple and scalable predictive uncertainty estimation using deep ensembles, Adv. Neural Inf. Process. Syst., 31 (2017), 6405–6416. |
| [17] |
A. R. Tan, S. Urata, S. Goldman, J. C. B. Dietschreit, R. Gómez-Bombarelli, Single-model uncertainty quantification in neural network potentials does not consistently outperform model ensembles, npj Comput. Mater., 9 (2023), 148. https://doi.org/10.1038/s41524-023-01180-8 doi: 10.1038/s41524-023-01180-8
|
| [18] |
G. Gao, H. Jiang, J. C. Vink, C. Chen, Y. El Khamra, J. J. Ita, Gaussian mixture model fitting method for uncertainty quantification by conditioning to production data, Comput. Geosci., 24 (2019), 663–681. https://doi.org/10.1007/s10596-019-9823-3 doi: 10.1007/s10596-019-9823-3
|
| [19] | S. Manjunath, M. B. S. Pande, B. N. Raveesh, G. K. Madhusudhan, Brain tumor detection and classification using convolution neural network, Int. J. Recent Technol. Eng., 8 (2019), 34–40. |
| [20] | R. H. Ramdlon, E. M. Kusumaningtyas, T. Karlita, Brain tumor classification using MRI images with K-nearest neighbor method, 2019 Int. Electron. Symp., (2019), 660–667. https://doi.org/10.1109/ELECSYM.2019.8901560 |
| [21] | N. Vani, A. Sowmya, N. Jayamma, Brain tumor classification using support vector machine, Int. Res. J. Eng. Technol., 4 (2017), 1724–1729. |
| [22] | A. R. Mathew, P. B. Anto, Tumor detection and classification of MRI brain image using wavelet transform and SVM, in 2017 International Conference on Signal Processing and Communication (ICSPC), (2017). https://doi.org/10.1109/CSPC.2017.8305810 |
| [23] |
J. Seetha, S. S. Raja, Brain tumor classification using convolutional neural networks, Biomed. Pharmacol. J., 11 (2018), 1457–1461. https://dx. doi.org/10.13005/bpj/1511 doi: 10.13005/bpj/1511
|
| [24] | K. R. Babu, U. S. Deepthi, A. S. Madhuri, P. S. Prasad, S. Shammem, Comparative analysis of brain tumor detection using deep learning methods, Int. J. Sci. Technol. Res., 8 (2019), 250–254. |
| [25] | K. Pathak, M. Pavthawala, N. Patel, D. Malek, V. Shah, B. Vaidya, Classification of brain tumor using convolutional neural network, in 2019 3rd International conference on Electronics, Communication and Aerospace Technology (ICECA), (2019), 128–132. https://doi.org/10.1109/ICECA.2019.8821931 |
| [26] |
S. M. Kulkarni, G. Sundari, Brain MRI classification using deep learning algorithm, Int. J. Eng. Adv. Technol., 9 (2020), 1226–1231. https://doi.org/10.35940/ijeat.C5350.029320 doi: 10.35940/ijeat.C5350.029320
|
| [27] | R. Lang, K. Jia, J. Feng, Brain tumor identification based on CNN-SVM model, in Proceedings of the 2nd International Conference on Biomedical Engineering and Bioinformatics, (2018), 31–35. https://doi.org/10.1145/3278198.3278209 |
| [28] |
E. Sert, F. Ӧzyurt, A. Doğanteklin, A new approach for brain tumor diagnosis system: Single image super-resolution-based maximum fuzzy entropy segmentation and convolutional neural network, Med. Hypotheses, 133 (2019), 109438. https://doi.org/10.1016/j.mehy.2019.109413 doi: 10.1016/j.mehy.2019.109413
|
| [29] |
F. Ӧzyurt, E. Sert, E. Avci, E. Doğanteklin, Brain tumor detection on convolutional neural networks with neutrosophic expert maximum fuzzy sure entropy, Measurement, 147 (2019), 106830. https://doi.org/10.1016/j.measurement.2019.07.058 doi: 10.1016/j.measurement.2019.07.058
|
| [30] | P. Saxena, A. Maheshwari, S. Maheshwari, Predictive modeling of brain tumor: A deep learning approach, in Innovations in Computational Intelligence and Computer Vision: Proceedings of ICICV 2020, (2020), 275–285. |
| [31] | S. Das, O. F. M. Riaz, R. Aranya, N. N. Labiba, Brain tumor classification using convolutional neural network, Int. Conf. Adv. Sci. Eng. Robot. Technol., 2019. |
| [32] | P. Afshar, K. N. Plataniotis, A. Mohammadi, Capsule networks for brain tumor classification based on MRI images and coarse tumor boundaries, in ICASSP 2019-2019 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), (2019), 1368–1372. https://doi.org/10.1109/ICASSP.2019.8683759 |
| [33] | A. M. Alqudah, H. Alquraan, I. A. Qasmieh, A. Alqudah, W. Al-Sharu, Brain tumor classification using deep learning technique–A comparison between cropped, uncropped, and segmented lesion images with different sizes, Int. J. Adv. Trends Comput. Sci. Eng., 8 (2019), 3684–3691. |
| [34] | Y. Zhou, Z. Li, H. Zhu, C. Chen, M. Gao, K. Xu, et al., Holistic brain tumor screening and classification based on DenseNet and recurrent neural network, in Brainlesion: Glioma, Multiple Sclerosis, Stroke and Traumatic Brain Injuries: 4th International Workshop, BrainLes 2018, Held in Conjunction with MICCAI 2018, Granada, Spain, September 16, 2018, Revised Selected Papers, Part I 4., 11383 (2019), 208–217. https://doi.org/10.1007/978-3-030-11723-8_21 |
| [35] |
H. F. Kareem, M. S. Al-Husieny, F. Y. Mohsen, E. A. Khalil, Z. S. Hassan, Evaluation of SVM performance in the detection of lung cancer in marked CT scan dataset, Indones. J. Electr. Eng. Comput. Sci., 21 (2021), 1731–1738. http://doi.org/10.11591/ijeecs.v21.i3.pp1731-1738 doi: 10.11591/ijeecs.v21.i3.pp1731-1738
|
| [36] |
M. S. Al-Huseiny, A. S. Sajit, Transfer learning with GoogLeNet for detection of lung cancer, Indones. J. Electr. Eng. Comput. Sci., 22 (2021), 1078–1086. http://doi.org/10.11591/ijeecs.v22.i2.pp1078-1086 doi: 10.11591/ijeecs.v22.i2.pp1078-1086
|
| [37] |
S. M. Naqi, M. Sharif, I. U. Lali, A 3D nodule candidate detection method supported by hybrid features to reduce false positives in lung nodule detection, Multimed. Tools Appl., 78 (2019), 26287–26311. https://doi.org/10.1007/s11042-019-07819-3 doi: 10.1007/s11042-019-07819-3
|
| [38] | W. Abbas, K. B. Khan, M. Aqeel, M. A. Azam, M. H. Ghouri, F. H. Jaskani, Lungs nodule cancer detection using statistical techniques, in 2020 IEEE 23rd International Multitopic Conference (INMIC), (2020), 1–6. https://doi.org/10.1109/INMIC50486.2020.9318181 |
| [39] | K. Roy, S. S. Chaudhury, M. Burman, A. Ganguly, C. Dutta, S. Banik, et al., A comparative study of lung cancer detection using supervised neural network, in 2019 International Conference on Opto-Electronics and Applied Optics (Optronix), (2019), 1–5. https://doi.org/10.1109/OPTRONIX.2019.8862326 |
| [40] | A. Mohite, Application of transfer learning technique for detection and classification of lung cancer using CT images, Int. J. Sci. Res. Manag., 9 (2021), 621–634. |
| [41] |
H. Polat, H. D. Mehr, Classification of pulmonary CT images by using hybrid 3D-deep convolutional neural network architecture, Appl. Sci., 9 (2019), 940. https://doi.org/10.3390/app9050940 doi: 10.3390/app9050940
|
| [42] | S. Mukherjee, S. U. Bohra, Lung cancer disease diagnosis using machine learning approach, in 2020 3rd International Conference on Intelligent Sustainable Systems (ICISS), (2020), 207–211. https://doi.org/10.1109/ICISS49785.2020.9315909 |
| [43] | A. Hoque, A. K. M. A. Farabi, F. Ahmed, M. Z. Islam, Automated detection of lung cancer using CT scan images, in 2020 IEEE Region 10 Symposium (TENSYMP), (2020), 1030–1033. https://doi.org/10.1109/TENSYMP50017.2020.9230861 |
| [44] |
G. Petmezas, V. E. Papageorgiou, V. Vassilikos, E. Pagourelias, G. Tsaklidis, A. K. Katsaggelos, et al., Recent advancements and applications of deep learning in heart failure: A systematic review, Comput. Biol. Med., 176 (2024), 108557. https://doi.org/10.1016/j.compbiomed.2024.108557 doi: 10.1016/j.compbiomed.2024.108557
|
| [45] | J. M. Wolterink, T. Leiner, M. A. Viergever, I. Išgum, Automatic segmentation and disease classification using cardiac cine MR images, Lect. Notes Comput. Sci., (2018), 101–110. |
| [46] |
Y. R. Wang, K. Yang, Y. Wen, P. Wang, Y. Hu, Y. Lai, et al., Screening and diagnosis of cardiovascular disease using artificial intelligence-enabled cardiac magnetic resonance imaging, Nat. Med., 30 (2024), 1471–1480. https://doi.org/10.1038/s41591-024-02971-2 doi: 10.1038/s41591-024-02971-2
|
| [47] | A. Sharma, R. Kumar, V. Jaiswal, Classification of heart disease from MRI images using convolutional neural network, in 2021 6th International Conference on Signal Processing, Computing and Control (ISPCC), (2021), 1–6. https://doi.org/10.1109/ISPCC53510.2021.9609408 |
| [48] |
M. Magris, A. Iosifidis, Bayesian learning for neural networks: An algorithmic survey, Artif. Intell. Rev., 56 (2023), 11773–11823. https://doi.org/10.1007/s10462-023-10443-1 doi: 10.1007/s10462-023-10443-1
|
| [49] | Y. Gal, Z. Ghahramani, Dropout as a Bayesian approximation: Representing model uncertainty in deep learning, in International Conference on Machine Learning, 48 (2016), 1050–1059. |
| [50] |
T. Nair, D. Precup, D. L. Arnold, T. Arbel, Exploring uncertainty measures in deep networks for multiple sclerosis lesion detection and segmentation, Med. Image Anal., 59 (2020), 101557. https://doi.org/10.1016/j.media.2019.101557 doi: 10.1016/j.media.2019.101557
|
| [51] |
P. Seeböck, J. I. Orlando, T. Schlegl, S. M. Waldstein, H. Bogunović, S. Klimscha, et al., Exploiting epistemic uncertainty of anatomy segmentation for anomaly detection in retinal OCT, IEEE Trans. Med. Imaging, 39 (2020), 87–98. https://doi.org/10.1109/TMI.2019.2919951 doi: 10.1109/TMI.2019.2919951
|
| [52] | G. Wang, W. Li, S. Ourselin, T. Vercauteren, Automatic brain tumor segmentation using convolutional neural networks with test-time augmentation, in Brainlesion: Glioma, Multiple Sclerosis, Stroke and Traumatic Brain Injuries: 4th International Workshop, BrainLes 2018, Held in Conjunction with MICCAI 2018, (2018), 61–72. |
| [53] |
G. Wang, W. Li, M. Aertsen, J. Deprest, S. Ourselin, T. Vercauteren, Aleatoric uncertainty estimation with test-time augmentation for medical image segmentation with convolutional neural networks, Neurocomputing, 338 (2019), 34–45. https://doi.org/10.1016/j.neucom.2019.01.103 doi: 10.1016/j.neucom.2019.01.103
|
| [54] |
N. Moshkov, B. Mathe, A. Kertesz-Farkas, R. Hollandi, P. Horvath, Test-time augmentation for deep learning-based cell segmentation on microscopy images, Sci. Rep., 10 (2020), 5068. https://doi.org/10.1038/s41598-020-61808-3 doi: 10.1038/s41598-020-61808-3
|
| [55] | M. Gaillochet, C. Desrosiers, H. Lombaert, TAAL: Test-time augmentation for active learning in medical image segmentation, Lect. Notes Comput. Sci., (2022), 43–53. |
| [56] | O. Berezsky, P. Liashchynskyi, O. Pitsun, I. Izonin, Synthesis of convolutional neural network architectures for biomedical image classification, Biomed. Signal Process. Control, 95 (2024), 106325. |
| [57] | D. Pessoa, G. Petmezas, V. E. Papageorgiou, B. Rocha, L. Stefanopoulos, V. Kilintzis et al., Pediatric respiratory sound classification using a dual input deep learning architecture, in 2023 IEEE Biomedical Circuits and Systems Conference (BioCAS), (2023), 1–5. https://doi.org/10.1109/BioCAS58349.2023.10388733 |
| [58] | J. Wu, Introduction to Convolutional Neural Networks, National Key Lab for Novel Software Technology, 5 (2017), 495. |
| [59] | D. Scherer, A. Müller, S. Behnke, Evaluation of pooling operations in convolutional architectures for object recognition, in International Conference on Artificial Neural Networks, (2010), 92–101. https://doi.org/10.1007/978-3-642-15825-4_10 |
| [60] | J. C. Duchi, E. Hazan, Y. Singer, Adaptive subgradient methods for online learning and stochastic optimization, J. Mach. Learn. Res., 12 (2011), 2121–2159. |
| [61] | A. Ashukha, A. Lyzhov, D. Molchanov, D. Vetrov, Pitfalls of in-domain uncertainty estimation and ensembling in deep learning, preprint, arXiv: 2002.06470. |
| [62] | A. Lyzhov, Y. Molchanova, A. Ashukha, D. Molchanov, D. Vetrov, Greedy policy search: A simple baseline for learnable test-time augmentation, in Conference on Uncertainty in Artificial Intelligence, (2020), 1308–1317. |
| [63] |
V. E. Papageorgiou, T. Zegkos, G. Efthimiadis, G. Tsaklidis, Analysis of digitalized ECG signals based on artificial intelligence and spectral analysis methods specialized in ARVC, Int. J. Numer. Methods Biomed. Eng., 38 (2022), e3644. https://doi.org/10.1002/cnm.3644 doi: 10.1002/cnm.3644
|
| [64] |
V. Papageorgiou, Brain tumor detection based on features extracted and classified using a low-complexity neural network, Trait. Signal, 38 (2021), 547–554. https://doi.org/10.18280/ts.380302 doi: 10.18280/ts.380302
|
| [65] | A. Hamada, Br35H: Brain tumor detection 2020, 2020. |
| [66] | A. Mahimkar, IQ-OTH/NCCD-Lung cancer dataset, 2021. |
| [67] |
O. Bernard, A. Lalande, C. Zotti, F. Cervenansky, X. Yang, P. A. Heng, et al., Deep learning techniques for automatic MRI cardiac multi-structures segmentation and diagnosis: Is the problem solved?, IEEE Trans. Med. Imaging, 37 (2018), 2514–2525. https://doi.org/10.1109/TMI.2018.2837502 doi: 10.1109/TMI.2018.2837502
|
| [68] |
I. Unal, Defining an optimal cut-point value in ROC analysis: An alternative approach, Comput. Math. Methods Med., 2017 (2017), 3762651. https://doi.org/10.1155/2017/3762651 doi: 10.1155/2017/3762651
|
| [69] |
A. Kiureghian, O. Ditlevsen, Aleatory or epistemic? Does it matter?, Struct. Saf., 31 (2009), 105–112. https://doi.org/10.1016/j.strusafe.2008.06.020 doi: 10.1016/j.strusafe.2008.06.020
|
| [70] |
E. Hüllermeier, W. Waegeman, Aleatoric and epistemic uncertainty in machine learning: An introduction to concepts and methods, Mach. Learn., 110 (2021), 457–506. https://doi.org/10.1007/s10994-021-05946-3 doi: 10.1007/s10994-021-05946-3
|
| [71] |
X. Zhou, H. Liu, F. Pourpanah, T. Zeng, X. Wang, A survey on epistemic (model) uncertainty in supervised learning: Recent advances and applications, Neurocomputing, 489 (2022), 449–465. https://doi.org/10.1016/j.neucom.2021.10.119 doi: 10.1016/j.neucom.2021.10.119
|
| [72] | S. A. Singh, N. C. Krishnan, D. R. Bathula, Towards reducing aleatoric uncertainty for medical imaging tasks, in 2022 IEEE 19th International Symposium on Biomedical Imaging (ISBI), (2022), 1–4. https://doi.org/10.1109/ISBI52829.2022.9761638 |
| [73] |
J. M. Caicedo, B. A. Zarate, Reducing epistemic uncertainty using a model updating cognitive system, Adv. Struct. Eng., 14 (2016), 1–12. https://doi.org/10.1260/1369-4332.14.1.55 doi: 10.1260/1369-4332.14.1.55
|
| [74] | A. Kendall, Y. Gal, What uncertainties do we need in Bayesian deep learning for computer vision? Adv. Neural Inf. Process. Syst., 30 (2017), 5574–5584. |
| [75] | S. Ghamizi, M. Cordy, M. Papadakis, Y. Le Traon, On evaluating adversarial robustness of chest X-ray classification: pitfalls and best practices, preprint, arXiv: 2212.08130. |
Vasileios E. Papageorgiou, Georgios Petmezas, Pantelis Dogoulis, Maxime Cordy, Nicos Maglaveras. Uncertainty CNNs: A path to enhanced medical image classification performance[J]. Mathematical Biosciences and Engineering, 2025, 22(3): 528-553. doi: 10.3934/mbe.2025020



 DownLoad:
DownLoad: