With the continuous enrichment of scientific and technological means, the production of most chicken farms has been able to achieve automation, but for the dead and sick chickens in the farm, there is no automatic monitoring step, only through continuous manual inspection and discovery. In the face of this problem, there are many solutions to identify dead and sick chickens through sound and image, but they can not achieve the ideal effect. In this paper, a sensor detection method based on artificial intelligence is proposed. This method 1) The maximum displacement of chicken activity is measured by fastening a foot ring on each chicken, and the three-dimensional total variance is designed and calculated to represent the chicken activity intensity. 2) The detection terminal collects the sensing data of foot ring through ZigBee network. 3) The state of chicken (dead chicken and sick chicken) can be identified by machine learning algorithm. This method of artificial intelligence combined with sensor network not only has high recognition rate, but also can reduce the operation cost. The practical results show that the accuracy of the system to identify dead and sick chickens is 95.6%, and the cost of the system running for 4 years can be reduced by 25% compared with manual operation.
Citation: Yiqin Bao, Hongbing Lu, Qiang Zhao, Zhongxue Yang, Wenbin Xu. Detection system of dead and sick chickens in large scale farms based on artificial intelligence[J]. Mathematical Biosciences and Engineering, 2021, 18(5): 6117-6135. doi: 10.3934/mbe.2021306
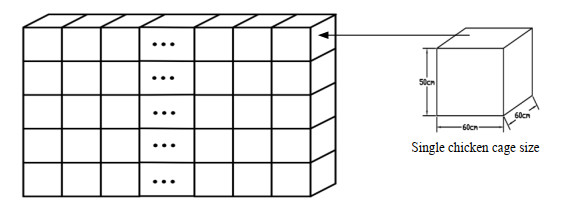
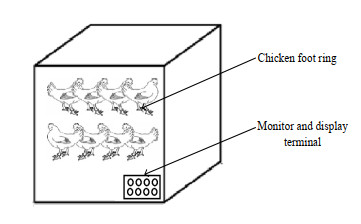
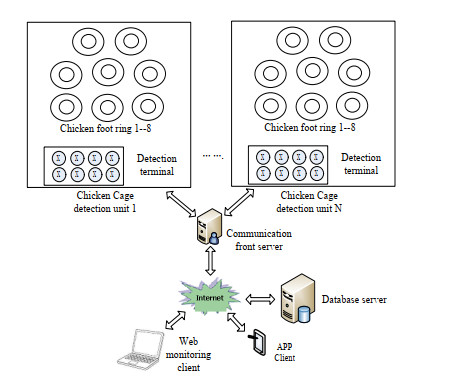
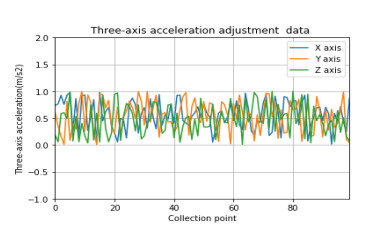
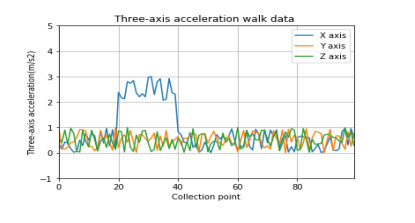
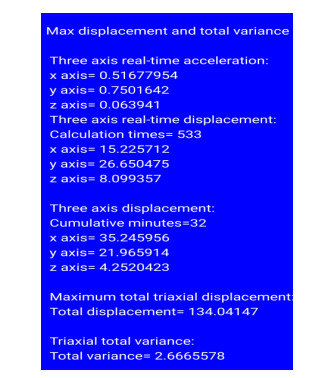
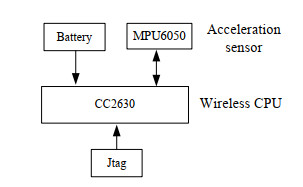
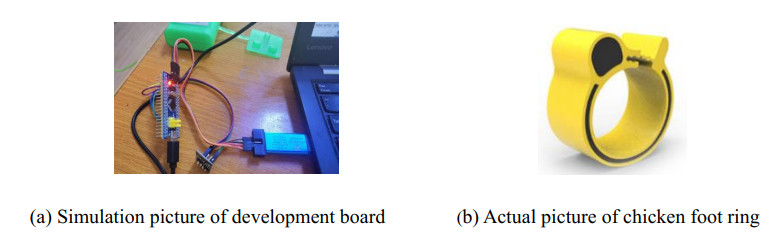
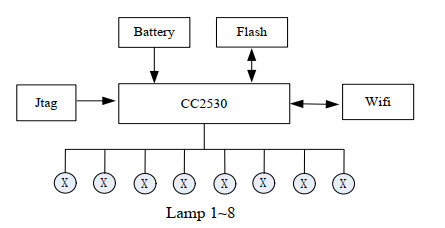
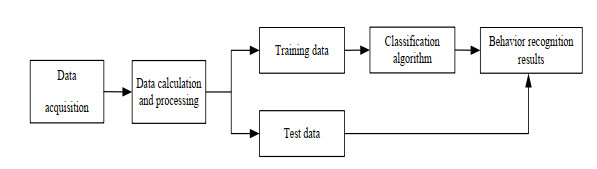
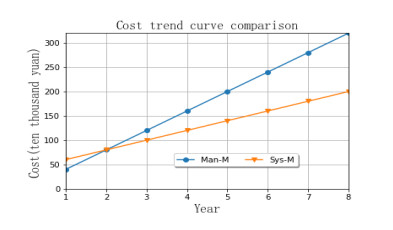
With the continuous enrichment of scientific and technological means, the production of most chicken farms has been able to achieve automation, but for the dead and sick chickens in the farm, there is no automatic monitoring step, only through continuous manual inspection and discovery. In the face of this problem, there are many solutions to identify dead and sick chickens through sound and image, but they can not achieve the ideal effect. In this paper, a sensor detection method based on artificial intelligence is proposed. This method 1) The maximum displacement of chicken activity is measured by fastening a foot ring on each chicken, and the three-dimensional total variance is designed and calculated to represent the chicken activity intensity. 2) The detection terminal collects the sensing data of foot ring through ZigBee network. 3) The state of chicken (dead chicken and sick chicken) can be identified by machine learning algorithm. This method of artificial intelligence combined with sensor network not only has high recognition rate, but also can reduce the operation cost. The practical results show that the accuracy of the system to identify dead and sick chickens is 95.6%, and the cost of the system running for 4 years can be reduced by 25% compared with manual operation.

| [1] |
E. F. Briefer, Vocal expression of emotions in mammals: mechanisms of production and evidence, J. Zool., 288 (2012), 1-20. doi: 10.1111/j.1469-7998.2012.00920.x

|
| [2] |
V. S. Roneel, J. M. Tom, An overview of applications and advancements in automatic sound recognition, Neurocomputing, 200 (2016), 22-34. doi: 10.1016/j.neucom.2016.03.020
|
| [3] |
J. D. Huang, W. Q. Wang, T. M. Zhang, Method for detecting avian influenza disease of chickens based on sound analysis, Biosyst. Eng., 180 (2019), 16-24. doi: 10.1016/j.biosystemseng.2019.01.015
|
| [4] |
X. L. Zhuang, M. N. Bi, J. L. Guo, S. Y. Wu, T. M. Zhang, Development of an early warning algorithm to detect sick broilers, Comput. Electron. Agr., 144(2018), 102-113. doi: 10.1016/j.compag.2017.11.032
|
| [5] |
X. L. Zhuang, T. M. Zhang, Detection of sick broilers by digital image processing and deep learning, Biosyst. Eng., 179 (2019), 106-116. doi: 10.1016/j.biosystemseng.2019.01.003
|
| [6] | K. Y. Wang, X. Y. Zhao, Y. He, Review on noninvasive monitoring technology of poultry behavior and physiological information, T. Chin. Soc. Agr. Eng., 33 (2017), 197-209. |
| [7] | J. T. Wang, M. X. Shen, L. S. Liu, Y. Xu, C. D. Okinda, G. V. Diraco, Recognition and classification of broiler droppings based on deep convolutional neural network, J. Sens., 2019 (2019), 1-11. |
| [8] | L. S. Liu, B. Li, R. Q. Zhao, W. Yao, M. X. Shen, J. Yang, et al., A novel method for broiler abnormal sound detection using WMFCC and HMM, J. Sens., 2020(2020), 1-7. |
| [9] |
A. Aydin, Development of an early detection system for lameness of broilers using computer vision, Comput. Electron. Agr., 136 (2017), 140-146. doi: 10.1016/j.compag.2017.02.019
|
| [10] | C. Okinda, M. Z. Lu, L. S Liu, I. Nyalala, C. Muneri, J. T. Wang, et al., A machine vision system for early detection and prediction of sick birds: A broiler chicken model, Comput. Electron. Agr., 188 (2019), 229-242. |
| [11] |
A. Aydin, Using 3D vision camera system to automatically assess the level of inactivity in broiler chickens, Comput. Electron. Agr., 135 (2017), 4-10. doi: 10.1016/j.compag.2017.01.024
|
| [12] | M. J. Zhang, H. H. Feng, H. L. Luo, Z. G. Li, X. S. Zhang, Comfort and health evaluation of live mutton sheep during the transportation based on wearable multi-sensor system, Comput. Electron. Agr., 176 (2020), 1-10. |
| [13] | M. J. Zhang, X. P. Wang, H. H. Feng, Q. Y. Huang, X. Q. Xiao, X. S. Zhang, Wearable internet of things enabled precision livestock farming in smart farms: A review of technical solutions for precise perception, biocompatibility, and sustainability monitoring, J. Clean. Prod., 312 (2021), 1-13. |
| [14] | B. Achour, M. Belkadi, R. Aoudjit, M. Laghrouche, Unsupervised automated monitoring of dairy cows' behavior based on inertial measurement unit attached to their back, Comput. Electron. Agr., 167 (2019), 1-12. |
| [15] | Z. Jia, C. Li, C. Y. Wan, X. J. Chen, Pedestrian recognition based on pedestrian acceleration information segmentation, Comput. Eng. Appl., 55 (2019), 203-209. |
| [16] | X. G. Zhang, H. Tang, C. J. Fu, Y. L. Shi, A gait recognition algorithm based on Hidden Markov model, Comput. Sci., 43 (2016), 285-289. |
| [17] | C. G. Bi, L. M. Xu, A tracking mechanism for mobile agents based on multi-sensor data fusion, Comput. Sci., 42 (2015), 544-549. |
| [18] | X. G. Li, F. L. Bu, X. Xu, Hierarchical recognition method of seismic scene based on mobile accelerometer, Comput. Eng. Appl., 53 (2017), 252-257. |
| [19] | W. M. Niu, L. Q. Fang, Z. Y. Qi, D. Q. Guo, Displacement measurement system based on MEMS acceleration sensor, Instrum. Tech. Sens., 3 (2020), 62-66. |
| [20] | G. H. Wang, J. Z. Liang, J. Chen, X. J. Zhu, Acceleration difference finite state machine step counting algorithm, Comput. Sci. Expl., 10 (2016), 1133-1142. |
| [21] | T. Li, X. C. Liu, S. Zhang, K. Wang, Y. L. Yang, Parallel support vector machine training with hybrid programming model, J. Comput. Res. Dev., 52 (2015), 1098-1108. |
| [22] |
Q. Zhang, H. G. Li, An improved least squares SVM with adaptive PSO for the prediction of coal spontaneous combustion, Math. Biosci. Eng., 16 (2019), 3169-3182. doi: 10.3934/mbe.2019157
|
| [23] | Z. M. Bao, S. R. Gong, S. Zhong, R. Yan, X. H. Dai, Person re-identification algorithm based on bidirectional KNN ranking optimization, Comput. Sci., 46 (2019), 267-271. |
| [24] | Y. M. Ji, Y. P. Zhang, X. B. Lang, D. C. Zhang, R. H. Wang, Parallel of decision tree classification algorithm for stream data, J. Comput. Res. Dev., 54 (2017), 1945-1957. |
| [25] |
W. D. Gao, Y. B. Xu, S. S. Li, Y. J. Fu, D. Y. Zheng, Y. J. She, Obstructive sleep apnea syndrome detection based on ballistocardiogram via machine learning approach, Math. Biosci. Eng., 16 (2019), 5672-5686. doi: 10.3934/mbe.2019282
|
| [26] | Q. S. Wang, R. Y. Wai, Bayesian Chinese spam filtering method based on phrases, Comput. Sci., 43 (2016), 256-259. |
| [27] |
Y. C. He, Z. Liu, Z. Li, J. R. Wu, J. Y. Fu, Modal identification of a high-rise building subjected to a landfall typhoon via both deterministic and Bayesian methods, Math. Biosci. Eng., 16(2019), 7155-7176. doi: 10.3934/mbe.2019359
|
| [28] |
Y. H. Zhuang, K. Wade, L. M. Saba, K. Kechris, Development of a tissue augmented Bayesian model for expression quantitative trait loci analysis, Math. Biosci. Eng., 17 (2020), 122-143. doi: 10.3934/mbe.2020050
|
| [29] | L. Q. Du, L. Liu, Compensation method of grinder force error based on BP neural network, Mach. Tools Hyd., 49 (2021), 1-5. |
| [30] | Q. S. Zhang, K. H. Yang, L. X. Li, Study on inversion method of left ventricular myocardial tissue parameters based on BP neural network, Biomed. Eng. Res., 40 (2021), 8-14. |
| [31] | H. W. Shen, Vibration fault detection of stamping machine based on BP neural network, Ind. Heat., 49 (2020), 29-33. |
| [32] |
S. K. Tian, N. Dai, L. L. Li, W. W. Li, Y. H. Sun, X. S. Cheng, Three-dimensional mandibular motion trajectory-tracking system based on BP neural network, Math. Biosci. Eng., 17 (2020), 5709-5726. doi: 10.3934/mbe.2020307
|
| [33] |
H. J. Xu, S. Li, S. D. Fan, M. Chen, A new inconsistent context fusion algorithm based on BP neural network and modified DST, Math. Biosci. Eng., 18 (2021), 968-982. doi: 10.3934/mbe.2021051
|


Figures(13) / Tables(5)

Yiqin Bao, Hongbing Lu, Qiang Zhao, Zhongxue Yang, Wenbin Xu. Detection system of dead and sick chickens in large scale farms based on artificial intelligence[J]. Mathematical Biosciences and Engineering, 2021, 18(5): 6117-6135. doi: 10.3934/mbe.2021306







 DownLoad:
DownLoad: