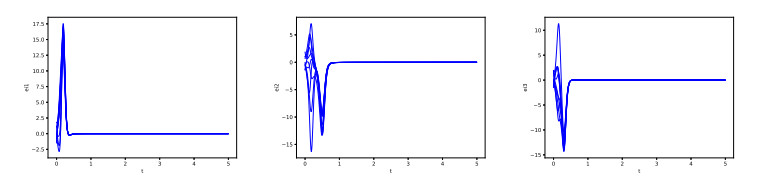
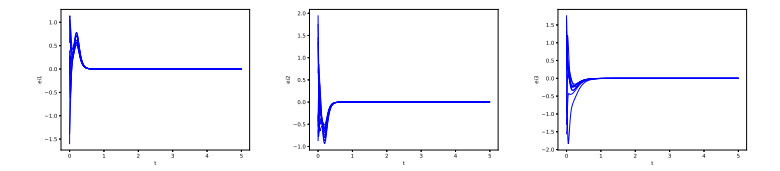
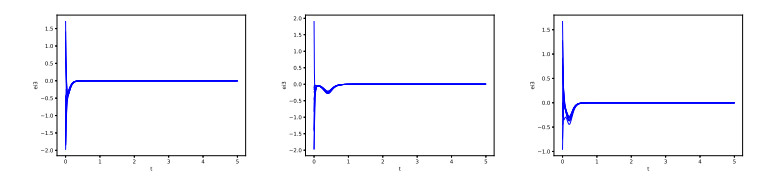
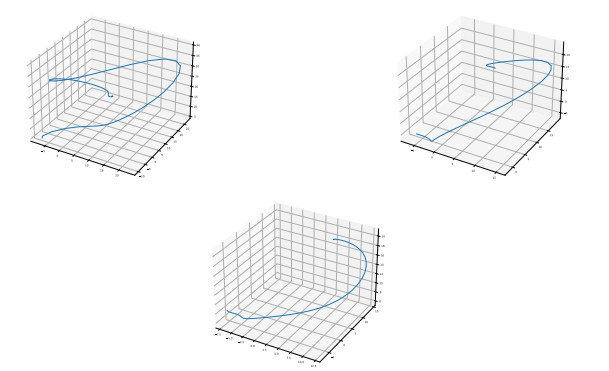
This paper addresses the pinning synchronization of nonlinear multiple time-varying coupling complex networks. Time-varying inner coupling in the single node state space and time-varying outer coupling among nodes in an entire complex network are taken into consideration. The main contribution is to propose some pinning synchronization criterion by which time-varying complex networks can be synchronized to the desired state. Besides, different parameters of linear controllers, adaptive controllers and adaptive coupling strength on the synchronization have been investigated. It is found that complex networks can achieve global synchronization by adaptively adjusting the coupling strength or controllers. Finally, simulation examples of random networks are given to verify the theoretical results.
Citation: Hai Lin, Jingcheng Wang. Pinning control of complex networks with time-varying inner and outer coupling[J]. Mathematical Biosciences and Engineering, 2021, 18(4): 3435-3447. doi: 10.3934/mbe.2021172
This paper addresses the pinning synchronization of nonlinear multiple time-varying coupling complex networks. Time-varying inner coupling in the single node state space and time-varying outer coupling among nodes in an entire complex network are taken into consideration. The main contribution is to propose some pinning synchronization criterion by which time-varying complex networks can be synchronized to the desired state. Besides, different parameters of linear controllers, adaptive controllers and adaptive coupling strength on the synchronization have been investigated. It is found that complex networks can achieve global synchronization by adaptively adjusting the coupling strength or controllers. Finally, simulation examples of random networks are given to verify the theoretical results.

| [1] | P. Erdös, A. Rényi, On the evolution of random graphs, Publ. Math. Inst. Hung. Acad. Sci., 5 (1960), 17–60. |
| [2] |
D. J. Watts, S. H. Strogatz, Collective dynamics of 'small-world' networks, Nature, 393 (1998), 440–442. doi: 10.1038/30918

|
| [3] |
M. E. J. Newman, D. J. Watts, Renormalization group analysis of the small-world network model, Phys. Lett. A, 263 (1999), 341–346. doi: 10.1016/S0375-9601(99)00757-4
|
| [4] |
A. L. Barabási, R. Albert, Emergence of scaling in random networks, Science, 286 (1999), 509–512. doi: 10.1126/science.286.5439.509
|
| [5] |
L. M. Pecora, T. L. Carroll, Synchronization in chaotic systems, Phys. Rev. Lett., 64 (1990), 821. doi: 10.1103/PhysRevLett.64.821
|
| [6] |
C. W. Wu, L. O. Chua, Synchronization in an array of linearly coupled dynamical systems, IEEE Trans. Circuits Syst. I, 42 (1995), 430–447. doi: 10.1109/81.404047
|
| [7] | L. M. Pecora, T. L. Carroll, Master stability functions for synchronized coupled systems, Phys. Rev. Lett., 80 (1998), 80. |
| [8] |
S. Y. Liu, M. W. Shen, Y. J. Bi, Global asymptotic behavior for mixed vaccination strategy in a delayed epidemic model with interim-immune, Math. Biosci. Eng., 17 (2020), 3601–3617. doi: 10.3934/mbe.2020203
|
| [9] | J. D. Skufca, E. M. Bollt, Communication and synchronization in disconnected networks with dynamic topology: Moving neighborhood networks, preprint, arXiv: nlin/0307010. |
| [10] |
B. Wang, J. Wang, L. Zhang, B. Zhang, Explicit synchronization of heterogeneous dynamics networks via three-layer communication framework, Int. J. Control, 89 (2016), 1269–1284. doi: 10.1080/00207179.2015.1126765
|
| [11] |
B. Wang, J. Wang, B. Zhang, H. Lin, X. Li, H. Wang, Leader–follower consensus for multi-agent systems with three-layer network framework and dynamic interaction jointly connected topology, Neurocomputing, 207 (2016), 231–239. doi: 10.1016/j.neucom.2016.03.073
|
| [12] |
B. Wang, J. Wang, L. Zhang, B. Zhang, X. Li, Cooperative control of heterogeneous uncertain dynamical networks: An adaptive explicit synchronization framework, IEEE Trans. Cybern., 47 (2017), 1484–1495. doi: 10.1109/TCYB.2016.2549556
|
| [13] |
B. Wang, J. Wang, B. Zhang, X. Li, Global cooperative control framework for multiagent systems subject to actuator saturation with industrial applications, IEEE Trans. Syst. Man Cybern. Syst., 47 (2017), 1270–1283. doi: 10.1109/TSMC.2016.2573584
|
| [14] |
N. Li, H. Sun, X. Jing, Q. Zhang, Exponential synchronisation of united complex dynamical networks with multi-links via adaptive periodically intermittent control, IET Control Theory Appl., 7 (2013), 1725–1736. doi: 10.1049/iet-cta.2013.0159
|
| [15] |
W. Yu, G. Chen, J. Lu, On pinning synchronization of complex dynamical networks, Automatica, 45 (2009), 429–435. doi: 10.1016/j.automatica.2008.07.016
|
| [16] |
X. Liu, T. Chen, Synchronization of nonlinear coupled networks via aperiodically intermittent pinning control, IEEE Trans. Neural Networks Learn. Syst., 26 (2015), 113–126. doi: 10.1109/TNNLS.2014.2311838
|
| [17] |
S. Wang, Y. Huang, S. Ren, Synchronization and robust synchronization for fractional-order coupled neural networks, IEEE Access, 5 (2017), 12439–12448. doi: 10.1109/ACCESS.2017.2721950
|
| [18] |
C. Zhang, X. Wang, C. Wang, Synchronization of complex networks with time-varying inner coupling and outer coupling matrices, Math. Methods Appl. Sci., 40 (2017), 4237–4245. doi: 10.1002/mma.4300
|
| [19] |
W. Zhang, C. Li, T. Huang, X. He, Synchronization of memristor-based coupling recurrent neural networks with time-varying delays and impulses, IEEE Trans. Neural Networks Learn. Syst., 26 (2015), 3308–3313. doi: 10.1109/TNNLS.2015.2435794
|
| [20] |
J. Tang, C. Zou, L. Zhao, A general complex dynamical network with time-varying delays and its novel controlled synchronization criteria, IEEE Syst. J., 10 (2016), 46–52. doi: 10.1109/JSYST.2014.2312417
|
| [21] |
J. Lu, G. Chen, A new chaotic attractor coined, Int. J. Bifurcation Chaos, 12 (2002), 659–661. doi: 10.1142/S0218127402004620
|
| [22] |
J. Lu, G. Chen, A time-varying complex dynamical network model and its controlled synchronization criteria, IEEE Trans. Autom. Control, 50 (2005), 841–846. doi: 10.1109/TAC.2005.849233
|
| [23] |
J. Xiang, G. Chen, On the v-stability of complex dynamical networks, Automatica, 43 (2007), 1049–1057. doi: 10.1016/j.automatica.2006.11.014
|
Figures(4)

Hai Lin, Jingcheng Wang. Pinning control of complex networks with time-varying inner and outer coupling[J]. Mathematical Biosciences and Engineering, 2021, 18(4): 3435-3447. doi: 10.3934/mbe.2021172







 DownLoad:
DownLoad: