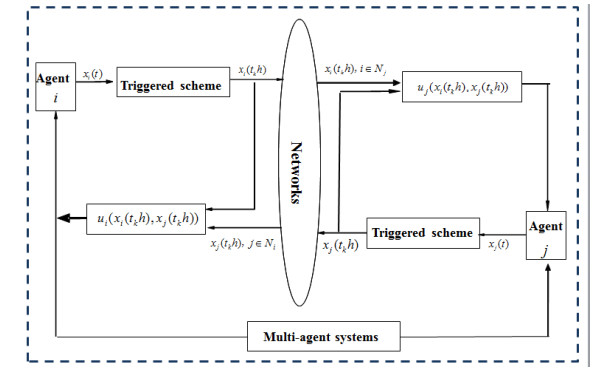
The H-infinity bipartite consensus problem is addressed for a class of linear multi-agent systems with external disturbance, where the positive and negative links are allowed in communication topology. A novel event-triggered communication scheme is presented to save limited network resources, which dependents on information from neighboring agents at event-triggered instants, the given event-triggered condition is detected only at discrete sampling times, thus Zeno behavior can be excluded, two types of event-triggered matrices have been introduced in our event-triggered communication scheme, which can further reduce the sampled-data transmission compared with some existed results. Considering the probabilistic actuator faults, the reliable controller is designed based on sampled-data, then a new distribution-based fault model is constructed by using coordinate transform. Some H-infinity bipartite consensus criteria can be derived by the Lyapunov stability theory and algebraic graph theory, at the same time, the feedback matrices and event-triggered matrices can be obtained by solving some linear matrix inequalities. Finally, a numerical example is employed to show the validity and advantage of the proposed transmission scheme.
Citation: Hongjie Li. H-infinity bipartite consensus of multi-agent systems with external disturbance and probabilistic actuator faults in signed networks[J]. AIMS Mathematics, 2022, 7(2): 2019-2043. doi: 10.3934/math.2022116
The H-infinity bipartite consensus problem is addressed for a class of linear multi-agent systems with external disturbance, where the positive and negative links are allowed in communication topology. A novel event-triggered communication scheme is presented to save limited network resources, which dependents on information from neighboring agents at event-triggered instants, the given event-triggered condition is detected only at discrete sampling times, thus Zeno behavior can be excluded, two types of event-triggered matrices have been introduced in our event-triggered communication scheme, which can further reduce the sampled-data transmission compared with some existed results. Considering the probabilistic actuator faults, the reliable controller is designed based on sampled-data, then a new distribution-based fault model is constructed by using coordinate transform. Some H-infinity bipartite consensus criteria can be derived by the Lyapunov stability theory and algebraic graph theory, at the same time, the feedback matrices and event-triggered matrices can be obtained by solving some linear matrix inequalities. Finally, a numerical example is employed to show the validity and advantage of the proposed transmission scheme.

| [1] |
Q. Sun, R. Han, H. Zhang, J. Zhou, J. M. Guerrero, A multiagent-based consensus algorithm for distributed coordinated control of distributed generators in the energy internet, IEEE T. Smart Grid, 6 (2015), 3006–3019. doi: 10.1109/TSG.2015.2412779. doi: 10.1109/TSG.2015.2412779

|
| [2] |
B. M. Jiang, M. Deghat, B. D. O. Anderson, Simultaneous velocity and position estimation via distance-only measurements with application to multi-agent system control, IEEE T. Automat. Contr., 62 (2016), 869–875. doi: 10.1109/TAC.2016.2558040. doi: 10.1109/TAC.2016.2558040
|
| [3] |
H. J. Li, Y. L. Zhu, J. Liu, Y. Wang, Consensus of second-order delayed nonlinear multi-agent systems via node-based distributed adaptive completely intermittent protocols, Appl. Math. Comput., 326 (2018), 1–15. doi: 10.1016/j.amc.2018.01.005. doi: 10.1016/j.amc.2018.01.005
|
| [4] |
R. Olfati-Saber, R. M. Murray, Consensus problems in networks of agents with switching topology and time-delays, IEEE T. Automat. Contr., 49 (2004), 1520–1533. doi: 10.1109/TAC.2004.834113. doi: 10.1109/TAC.2004.834113
|
| [5] |
W. Ren, R. W. Beard, Consensus seeking in multiagent systems under dynamically changing interaction topologies, IEEE T. Automat. Contr., 50 (2005), 655–661. doi: 10.1109/TAC.2005.846556. doi: 10.1109/TAC.2005.846556
|
| [6] |
W. W. Yu, G. R. Chen, M. Cao, Some necessary and sufficient conditions for second-order consensus in multi-agent dynamical systems, Automatica, 46 (2010), 1089–1095. doi: 10.1016/j.automatica.2010.03.006. doi: 10.1016/j.automatica.2010.03.006
|
| [7] |
H. J. Li, J. J. Zhu, J. Liu, Y. Wang, Neural-network-based adaptive quasi-consensus of nonlinear multi-agent systems with communication constrains and switching topologies, Nonlinear Anal.-Hybri., 35 (2020), 100833. doi: 10.1016/j.nahs.2019.100833. doi: 10.1016/j.nahs.2019.100833
|
| [8] |
G. H. Wen, Z. S. Duan, W. W. Yu, G. R. Chen, Consensus of second-order multi-agent systems with delayed nonlinear dynamics and intermittent communications, Int. J. Control, 86 (2013), 322–331. doi: 10.1080/00207179.2012.727473. doi: 10.1080/00207179.2012.727473
|
| [9] |
X. L. Liu, D. X. Chen, Z. W. Liu, Y. W. Wang, Distributed leaderless impulsive consensus of non-linear multi-agent systems with input saturation, Nonlinear Anal.-Hybri., 36 (2020), 100855. doi: 10.1016/j.nahs.2020.100855. doi: 10.1016/j.nahs.2020.100855
|
| [10] |
H. J. Li, Leader-following consensus of nonlinear multi-agent systems with mixed delays and uncertain parameters via adaptive pinning intermittent control, Nonlinear Anal.-Hybri., 22 (2016), 202–214. doi: 10.1016/j.nahs.2016.04.004. doi: 10.1016/j.nahs.2016.04.004
|
| [11] |
C. Altafini, Consensus problems on networks with antagonistic interactions, IEEE T. Automat. Contr., 58 (2012), 935–946. doi: 10.1109/TAC.2012.2224251. doi: 10.1109/TAC.2012.2224251
|
| [12] |
F. Liu, Q. Song, G. Wen, J. Q. Lu, J. D. Cao, Bipartite synchronization of Lur'e network under signed digraph, Int. J. Robust Nonlin., 28 (2018), 6087–6105. doi: 10.1002/rnc.4358. doi: 10.1002/rnc.4358
|
| [13] |
D. Y. Meng, M. J. Du, Y. M. Jia, Interval bipartite consensus of networked agents associated with signed digraphs, IEEE T. Automat. Contr., 61 (2016), 3755–3770. doi: 10.1109/TAC.2016.2528539. doi: 10.1109/TAC.2016.2528539
|
| [14] |
G. H. Wen, H. Wang, X. H. Yu, W. W. Yu, Bipartite tracking consensus of linear multi-agent systems with a dynamic leader, IEEE T. Circuits-II, 65 (2017), 1204–1208. doi: 10.1109/TCSII.2017.2777458. doi: 10.1109/TCSII.2017.2777458
|
| [15] |
A. H. Hu, J. H. Park, J. D. Cao, Node-to-node bipartite consensus of multi-agent systems with disturbances, IET Control Theory A., 14 (2020), 1692–1699. doi: 10.1049/iet-cta.2019.0973. doi: 10.1049/iet-cta.2019.0973
|
| [16] |
H. W. Zhang, J. Chen, Bipartite consensus of multi-agent systems over signed graphs: State feedback and output feedback control approaches, Int. J. Robust Nonlin., 27 (2017), 3–14. doi: 10.1002/rnc.3552. doi: 10.1002/rnc.3552
|
| [17] |
S. D. Zhai, Q. D. Li, Pinning bipartite synchronization for coupled nonlinear systems with antagonistic interactions and switching topologies, Syst. Control. Lett., 94 (2016), 127–132. doi: 10.1016/j.sysconle.2016.03.008. doi: 10.1016/j.sysconle.2016.03.008
|
| [18] |
H. X. Hu, W. W. Yu, G. H. Wen, Q. Xuan, J. D. Cao, Reverse group consensus of multi-agent systems in the cooperation-competition network, IEEE T. Circuits-I, 63 (2016), 2036–2047. doi: 10.1109/TCSI.2016.2591264. doi: 10.1109/TCSI.2016.2591264
|
| [19] | H. X. Hu, G. H. Wen, X. H. Yu, Z. G. Wu, T. W. Huang, Distributed stabilization of heterogeneous mass in uncertain strong-weak competition networks, IEEE T. Syst. Man Cy.-S., 2020, 1–13. doi: 10.1109/TSMC.2020.3034765. |
| [20] |
D. V. Dimarogonas, E. Frazzoli, K. H. Johansson, Distributed event-triggered control for multi-agent systems, IEEE T. Automat. Contr., 57 (2011), 1291–1297. doi: 10.1109/TAC.2011.2174666. doi: 10.1109/TAC.2011.2174666
|
| [21] |
P. Tabuada, Event-triggered real-time scheduling of stabilizing control tasks, IEEE T. Automat. Contr., 52 (2007), 1680–1685. doi: 10.1109/TAC.2007.904277. doi: 10.1109/TAC.2007.904277
|
| [22] |
X. F. Wang, M. D. Lemmon, Self-triggered feedback control systems with finite-gain $L_{2}$ stability, IEEE T. Automat. Contr., 54 (2009), 452–467. doi: 10.1109/TAC.2009.2012973. doi: 10.1109/TAC.2009.2012973
|
| [23] |
H. Xia, M. T. Cao, Z. Q. Xu, Bipartite tracking consensus for asynchronous second-order multiagent systems with event-triggered mechanism, Int. J. Robust Nonlin., 31 (2021), 524–540. doi: 10.1002/rnc.5296. doi: 10.1002/rnc.5296
|
| [24] |
J. Ren, Q. Song, G. P. Lu, Event-triggered bipartite leader-following consensus of second-order nonlinear multi-agent systems under signed digraph, J. Franklin I., 356 (2019), 6591–6609. doi: 10.1016/j.jfranklin.2019.06.034. doi: 10.1016/j.jfranklin.2019.06.034
|
| [25] |
Y. L. Cai, H. G. Zhang, Q. He, W. Z. Song, Fully distributed bipartite leader-following consensus for uncertain linear multi-agent systems with event-triggered mechanism, Int. J. Robust Nonlin., 31 (2021), 1375–1394. doi: 10.1002/rnc.5364. doi: 10.1002/rnc.5364
|
| [26] |
J. Ren, Q. Song, Y. B. Gao, G. P. Lu, Leader-following bipartite consensus of second-order time-delay nonlinear multi-agent systems with event-triggered pinning control under signed digraph, Neurocomputing, 385 (2020), 186–196. doi: 10.1016/j.neucom.2019.12.043. doi: 10.1016/j.neucom.2019.12.043
|
| [27] |
Y. L. Cai, H. G. Zhang, R. Yu, Q. He, Fully distributed bipartite output consensus of heterogeneous linear multiagent systems based on event-triggered transmission mechanism, Int. J. Robust Nonlin., 30 (2020), 3382–3410. doi: 10.1002/rnc.4939. doi: 10.1002/rnc.4939
|
| [28] |
Y. L. Cai, H. G. Zhang, Y. Liu, Q. He, Distributed bipartite finite-time event-triggered output consensus for heterogeneous linear multi-agent systems under directed signed communication topology, Appl. Math. Comput., 378 (2020), 125162. doi: 10.1016/j.amc.2020.125162. doi: 10.1016/j.amc.2020.125162
|
| [29] |
Y. L. Xu, J. H. Wang, Y. W. Zhang, Y. Xu, Event-triggered bipartite consensus for high-order multi-agent systems with input saturation, Neurocomputing, 379 (2020), 284–295. doi: 10.1016/j.neucom.2019.10.095. doi: 10.1016/j.neucom.2019.10.095
|
| [30] |
Q. Deng, Y. Peng, T. Han, D. Qu, Event-triggered bipartite consensus in networked Euler-Lagrange systems with external disturbance, IEEE T. Circuits-II, 68 (2021), 2870–2874. doi: 10.1109/TCSII.2021.3057859. doi: 10.1109/TCSII.2021.3057859
|
| [31] |
A. H. Hu, J. H. Park, J. D. Cao, M. F. Hu, Y. P. Luo, Event-triggered bipartite consensus over cooperation-competition networks under DoS attacks, Sci. China Technol. Sci., 64 (2021), 157–168. doi: 10.1007/s11431-020-1728-y. doi: 10.1007/s11431-020-1728-y
|
| [32] |
A. H. Hu, Y. Y. Wang, J. D. Cao, A. Alsaedi, Event-triggered bipartite consensus of multi-agent systems with switching partial couplings and topologies, Inform. Sciences, 521 (2020), 1–13. doi: 10.1016/j.ins.2020.02.038. doi: 10.1016/j.ins.2020.02.038
|
| [33] |
Z. H. Cheng, D. Yue, S. L. Hu, H. Ge, L. Chen, Distributed event-triggered consensus of multi-agent systems under periodic DoS jamming attacks, Neurocomputing, 400 (2020), 458–466. doi: 10.1016/j.neucom.2019.03.089. doi: 10.1016/j.neucom.2019.03.089
|
| [34] |
D. Yue, E. G. Tian, Q. L. Han, A delay system method for designing event-triggered controllers of networked control systems, IEEE T. Automat. Contr., 58 (2012), 475–481. doi: 10.1109/TAC.2012.2206694. doi: 10.1109/TAC.2012.2206694
|
| [35] |
C. Peng, Q. L. Han, A novel event-triggered transmission scheme and $L_{2}$ control co-design for sampled-data control systems, IEEE T. Automat. Contr., 58 (2013), 2620–2626. doi: 10.1109/TAC.2013.2256015. doi: 10.1109/TAC.2013.2256015
|
| [36] |
S. Chen, D. W. C. Ho, L. L. Li, M. Liu, Fault-tolerant consensus of multi-agent system with distributed adaptive protocol, IEEE T. Cybernetics, 45 (2014), 2142–2155. doi: 10.1109/TCYB.2014.2366204. doi: 10.1109/TCYB.2014.2366204
|
| [37] |
X. H. Wang, C. P. Tan, Dynamic output feedback fault tolerant control for unmanned underwater vehicles, IEEE T. Veh. Technol., 69 (2019), 3693–3702. doi: 10.1109/TVT.2019.2957529. doi: 10.1109/TVT.2019.2957529
|
| [38] |
R. Mu, A. R. Wei, H. T. Li, L. Yue, Leader-following consensus for multi-agent systems with actuator faults via adaptive event-triggered control, J. Franklin I., 358 (2021), 1327–1349. doi: doi: 10.1016/j.jfranklin.2020.11.027. doi: 10.1016/j.jfranklin.2020.11.027
|
| [39] |
X. Z. Jin, Z. Zhao, Y. G. He, Insensitive leader-following consensus for a class of uncertain multi-agent systems against actuator faults, Neurocomputing, 272 (2018), 189–196. doi: 10.1016/j.neucom.2017.06.072. doi: 10.1016/j.neucom.2017.06.072
|
| [40] |
J. H. Qin, G. S. Zhang, W. X. Zheng, Y. Kang, Adaptive sliding mode consensus tracking for second-order nonlinear multiagent systems with actuator faults, IEEE T. Cybernetics, 49 (2018), 1605–1615. doi: 10.1109/TCYB.2018.2805167. doi: 10.1109/TCYB.2018.2805167
|
| [41] |
J. Long, W. Wang, J. S. Huang, J. Zhou, K. X. Liu, Distributed adaptive control for asymptotically consensus tracking of uncertain nonlinear systems with intermittent actuator faults and directed communication topology, IEEE T. Cybernetics, 51 (2021), 4050–4061. doi: 10.1109/TCYB.2019.2940284. doi: 10.1109/TCYB.2019.2940284
|
| [42] |
J. H. Qin, G. S. Zhang, W. X. Zheng, Y. Kang, Neural network-based adaptive consensus control for a class of nonaffine nonlinear multiagent systems with actuator faults, IEEE T. Neur. Net. Lear., 30 (2019), 3633–3644. doi: 10.1109/TNNLS.2019.2901563. doi: 10.1109/TNNLS.2019.2901563
|
| [43] | A. Shams, M. Rehan, M. Tufail, $H_{\infty}$ bipartite consensus of nonlinear multi-agent systems over a directed signed graph with a leader of non-zero input, Int. J. Control, 2021, 1–15. doi: 10.1080/00207179.2021.1888157. |
| [44] |
W. Chen, D. R. Ding, H. L. Dong, G. L. Wei, X. H. Ge, Finite-horizon $H_{\infty}$ bipartite consensus control of cooperation-competition multiagent systems with round-robin protocols, IEEE T. Cybernetics, 51 (2020), 3699–3709. doi: 10.1109/TCYB.2020.2977468. doi: 10.1109/TCYB.2020.2977468
|
| [45] | K. Q. Gu, V. L. Kharitonov, J. Chen, Stability of time-delay systems, Boston: Birkhäuser, 2003. doi: 10.1007/978-1-4612-0039-0. |
| [46] | K. Q. Gu, An integral inequality in the stability problem of time-delay systems, In: Proceedings of the 39th IEEE conference on decision and control (Cat. No. 00CH37187), 3 (2000), 2805–2810. doi: 10.1109/CDC.2000.914233. |
| [47] | E. Fridman, Introduction to time-delay systems: Analysis and control, Springer, 2014. |
| [48] | S. Boyd, L. E. Ghaoui, E. Feron, V. Balakrishnan, Linear matrix inequalities in system and control theory, Philadelphia: SIAM, 1994. doi: 10.1137/1037119. |
| [49] |
E. G. Tian, D. Yue, C. Peng, Reliable control for networked control systems with probabilistic actuator fault and random delays, J. Franklin I., 347 (2010), 1907–1926. doi: 10.1016/j.jfranklin.2010.10.010. doi: 10.1016/j.jfranklin.2010.10.010
|
| [50] |
J. L. Liu, D. Yue, Event-triggering in networked systems with probabilistic sensor and actuator faults, Inform. Sciences, 240 (2013), 145–160. doi: 10.1016/j.ins.2013.03.04. doi: 10.1016/j.ins.2013.03.04
|
Figures(6) / Tables(1)

Hongjie Li. H-infinity bipartite consensus of multi-agent systems with external disturbance and probabilistic actuator faults in signed networks[J]. AIMS Mathematics, 2022, 7(2): 2019-2043. doi: 10.3934/math.2022116







 DownLoad:
DownLoad: