In nature, the vast majority of species live in ecosystems that are not isolated, and the same is true for predator-prey ecological systems. With this work, we extend a predator-prey model by considering the inclusion of an immigration term in both species. From a biological point of view, that allows us to achieve a more realistic model. We consider a system with a Holling type Ⅰ functional response and study its global dynamics, which allows to not only determine the behavior in a region of the plane $ \mathbb{R}^2 $, but also to control the orbits that either go or come to infinity. First, we study the local dynamics of the system, by analyzing the singular points and their stability, as well as the possible behavior of the limit cycles when they exist. By using the Poincaré compactification, we determine the global dynamics by studying the global phase portraits in the positive quadrant of the Poincaré disk, which is the region where the system is of interest from a biological point of view.
Citation: Érika Diz-Pita. Global dynamics of a predator-prey system with immigration in both species[J]. Electronic Research Archive, 2024, 32(2): 762-778. doi: 10.3934/era.2024036
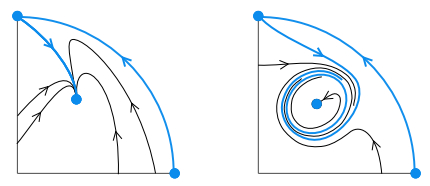
In nature, the vast majority of species live in ecosystems that are not isolated, and the same is true for predator-prey ecological systems. With this work, we extend a predator-prey model by considering the inclusion of an immigration term in both species. From a biological point of view, that allows us to achieve a more realistic model. We consider a system with a Holling type Ⅰ functional response and study its global dynamics, which allows to not only determine the behavior in a region of the plane $ \mathbb{R}^2 $, but also to control the orbits that either go or come to infinity. First, we study the local dynamics of the system, by analyzing the singular points and their stability, as well as the possible behavior of the limit cycles when they exist. By using the Poincaré compactification, we determine the global dynamics by studying the global phase portraits in the positive quadrant of the Poincaré disk, which is the region where the system is of interest from a biological point of view.

| [1] |
J. Liang, C. Liu, G. Q. Sun, L. Li, L. Zhang, M. Hou, et al., Nonlocal interactions between vegetation induce spatial patterning, Appl. Math. Comput., 428 (2023), 127061. https://doi.org/10.1016/j.amc.2022.127061 doi: 10.1016/j.amc.2022.127061

|
| [2] |
L. F. Hou, G. Q. Sun, M. Perc, The impact of heterogeneous human activity on vegetation patterns in arid environments, Commun. Nonlinear Sci. Numer. Simul., 126 (2023), 107461. https://doi.org/10.1016/j.cnsns.2023.107461 doi: 10.1016/j.cnsns.2023.107461
|
| [3] |
M. A. Abbasi, Fixed points stability, bifurcation analysis, and chaos control of a Lotka–Volterra model with two predators and their prey, Int. J. Biomath., 17 (2024), 2350032. https://doi.org/10.1142/S1793524523500328 doi: 10.1142/S1793524523500328
|
| [4] |
D. Cammarota, N. Z. Monteiro, R. Menezes, H. Fort, A. M. Segura, Lotka–Volterra model with Allee effect: Equilibria, coexistence and size scaling of maximum and minimum abundance, J. Math. Biol., 87 (2023). https://doi.org/10.1007/s00285-023-02012-5 doi: 10.1007/s00285-023-02012-5
|
| [5] |
S. N. Chowdhury, J. Banerjee, M. Perc, D. Ghosh, Eco-evolutionary cyclic dominance among predators, prey, and parasites, J. Theor. Biol. 564 (2023), 111446. https://doi.org/10.1016/j.jtbi.2023.111446 doi: 10.1016/j.jtbi.2023.111446
|
| [6] |
J. Li, X. Liu, C. Wei, The impact of role reversal on the dynamics of predator-prey model with stage structure, Appl. Math. Model., 104 (2022), 339–357. https://doi.org/10.1016/j.apm.2021.11.029 doi: 10.1016/j.apm.2021.11.029
|
| [7] |
J. Llibre, Y. P. Mancilla-Martinez, Global attractor in the positive quadrant of the Lotka-Volterra system in $\mathbb{R}^2$, Int. J. Bifur. Chaos Appl. Sci. Eng., 33 (2023), 2350147. https://doi.org/10.1142/S021812742350147X doi: 10.1142/S021812742350147X
|
| [8] |
P. A. Naik, Z. Eskandari, M. Yavuz, J. Zu, Complex dynamics of a discrete-time Bazykin-Berezovskaya prey-predator model with a strong Allee effect, J. Comput. Appl. Math., 413 (2022), 114401. https://doi.org/10.1016/j.cam.2022.114401 doi: 10.1016/j.cam.2022.114401
|
| [9] |
P. A. Naik, Z. Eskandari, H. E. Shahkari, K. Owolabi, Bifurcation analysis of a discrete-time prey-predator model, Bull. Biomath., 1 (2023), 111–123. https://doi.org/10.59292/bulletinbiomath.2023006 doi: 10.59292/bulletinbiomath.2023006
|
| [10] |
Z. Eskandari, P. A. Naik, M. Yavuz, Dynamical behaviors of a discrete-time preypredator model with harvesting effect on the predator, J. Appl. Anal. Comput., 14 (2024), 283–297. https://doi.org/10.11948/20230212 doi: 10.11948/20230212
|
| [11] |
M. S. Bowlin, I. A. Bisson, J. Shamoun-Baranes, J. D. Reichard, N. Sapir, P. P. Marra, et al., Grand challenges in migration biology, Integr. Comp. Biol., 50 (2010), 261–279. https://doi.org/10.1093/icb/icq013 doi: 10.1093/icb/icq013
|
| [12] | B. Hoare, Animal Migration, Remarkable Journeys by Air, Land and Sea, London, United Kingdom, 2009. |
| [13] |
C. Egevang, I. J. Stenhouse, R. A. Phillips, J. R. D. Silk, Tracking of Arctic terns Sterna paradisaea reveals longest animal migration, Proc. Natl. Acad. Sci., 107 (2010), 2078–2081. https://doi.org/10.1073/pnas.0909493107 doi: 10.1073/pnas.0909493107
|
| [14] |
I. Al-Darabsah, X. Tang, Y. Yuan, A prey-predator model with migrations and delays, Dicrete Contin. Dyn. Syst. Ser. B, 2 (2016), 737–761. https://doi.org/10.3934/dcdsb.2016.21.737 doi: 10.3934/dcdsb.2016.21.737
|
| [15] |
S. Apima, A predator-prey model with logistic growth for constant delayed migration, J. Adv. Math. Comput. Sci., 35 (2020), 51–61. https://doi.org/10.9734/jamcs/2020/v35i330259 doi: 10.9734/jamcs/2020/v35i330259
|
| [16] |
Y. Chen, F. Zhang, Dynamics of a delayed predator–prey model with predator migration, Appl. Math. Model., 37 (2013), 1400–1412. https://doi.org/10.1016/j.apm.2012.04.012 doi: 10.1016/j.apm.2012.04.012
|
| [17] |
G. Zhu, J. Wei, Global stability and bifurcation analysis of a delayed predator–prey system with prey immigration, Electron. J. Qual. Theory Differ. Equations, 13 (2016), 1–20. https://doi.org/10.14232/ejqtde.2016.1.13 doi: 10.14232/ejqtde.2016.1.13
|
| [18] |
A. Zeeshan, R. Faranak, H. Kamyar, A fractal-fractional-order modified predator-prey mathematical model with immigrations, Math. Comput. Simul., 207 (2023), 466–481. https://doi.org/10.1016/j.matcom.2023.01.006 doi: 10.1016/j.matcom.2023.01.006
|
| [19] |
É. Diz-Pita, M. V. Otero-Espinar, Predator-prey models: A review of some recent advances, Mathematics, 9 (2021), 1783. https://doi.org/10.3390/math9151783 doi: 10.3390/math9151783
|
| [20] |
J. Sugie, Y. Saito, Uniqueness of limit cycles in a Rosenzweig-Mcarthur model with prey immigration, SIAM J. Appl. Math., 72 (2012), 299–316. https://doi.org/10.1137/11084008X doi: 10.1137/11084008X
|
| [21] |
M. Priyanka, P. Muthukumar, S. Bhakelar, Stability and bifurcation analysis of two-species prey-predator model incorporating external factors, Int. J. Bifurcation Chaos, 32 (2022), 2250172. https://doi.org/10.1142/S0218127422501723 doi: 10.1142/S0218127422501723
|
| [22] |
T. Tahara, M. K. Areja, T. Kawano, J. M. Tubay, J. F. Rabajante, H. Ito, et al., Asymptotic stability of a modified Lotka-Volterra model with small immigrations, Nat. Sci. Rep., 8 (2018), 7029. https://doi.org/10.1038/s41598-018-25436-2 doi: 10.1038/s41598-018-25436-2
|
| [23] |
D. Mukherjee, The effect of refuge and immigration in a predator-prey system in the presence of a competitor for the prey, Nonlinear Anal. Real World Appl., 31 (2016), 277–287. https://doi.org/10.1038/s41598-018-25436-2 doi: 10.1038/s41598-018-25436-2
|
| [24] |
F. Kangalgil, S. Isik, Effect of immigration in a predator-prey system: Stability, bifurcation and chaos, AIMS Math., 7 (2022), 14354–14375. https://doi.org/10.3934/math.2022791 doi: 10.3934/math.2022791
|
| [25] |
S. M. S. Rana, Bifurcation and complex dynamics of a discrete-time predator-prey system, Comput. Ecol. Software, 5 (2015), 187–200. https://doi.org/10.1186/s13662-015-0680-7 doi: 10.1186/s13662-015-0680-7
|
| [26] |
É. Diz-Pita, J. Llibre, M. V. Otero-Espinar, Global phase portraits of a predator-prey system, Electron. J. Qual. Theory Differ. Equations, 16 (2022), 1–13. https://doi.org/10.1186/s13662-015-0680-7 doi: 10.1186/s13662-015-0680-7
|
| [27] | F. Dumortier, J. Llibre, J. C. Artés, Qualitative Theory of Planar Differential systems, Springer-Verlag, New York, 2006. |
| [28] | Y. Kuznetsov Elements of Applied Bifurcation Theory, 2nd edition, Springer, 1998. |



Figures(4)
Érika Diz-Pita. Global dynamics of a predator-prey system with immigration in both species[J]. Electronic Research Archive, 2024, 32(2): 762-778. doi: 10.3934/era.2024036







 DownLoad:
DownLoad: