Citation: Jun Wang, Hans Conrad. On the dynamic compared to static grain growth rate in 3 mole% yttria-stabilized tetragonal zirconia polycrystals (3 Y-TZP)[J]. AIMS Materials Science, 2016, 3(3): 1208-1221. doi: 10.3934/matersci.2016.3.1208

| [1] | Kingery WD, Bowen HK, Ullmann DR (1976) Introduction to Ceramics, John Wiley & Sons, New York. |
| [2] | Nieh TG, Wadsworth J (1989) Dynamic grain growth during superplastic deformation of yttria-stabilized tetragonal zirconia polycrystal. J Am Ceram Soc 72: 1469–1472. |
| [3] |
Nieh TG, Wadsworth J (1990) Effect of grain size on superplastic behavior of Y-TZP. Scripta Metall 24: 763–766. doi: 10.1016/0956-716X(90)90238-C

|
| [4] | Sherby OD, Wadsworth J (1989) Superplasticity–recent advances and future directions. Prog Mater Sci 33: 169–221. |
| [5] | Wilkinson DS, Caceres CH (1984) On the mechanism of strain-enhanced grain growth during superplastic deformation. Acta Metall 32: 1335–1345. |
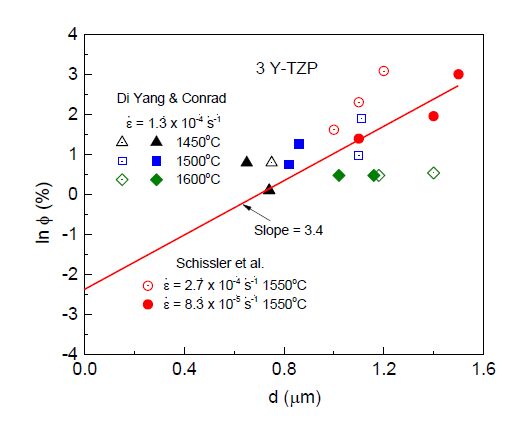
| [6] | Schissler DJ, Chokshi AH, Nieh TG, et al. (1991) Microstructural aspects of superplastic tensile deformation and cavitation in fine-grained yttria-stabilized tetragonal zirconia. Acta Metall Mater 39: 3227–3236. |
| [7] | Burke JE, Turnbull D (1953) Recrystallization and grain growth. Pro Met Phys 3: 220–292. |
| [8] | Cahn JW (1962) The impurity-drag effect in grain boundary motion. Acta Metall 10: 789–798. |
| [9] | Lücke K, Stüwe H-P (1963) On the theory of grain boundary motion in Recovery and Recrystallization of Metals, L. Himmel, ed., Gordon and Breach, New York, 171–210. |
| [10] | Hwang S-L, Chen I-W (1990) Grain size control of tetragonal zirconia polycrystals using the space charge concept. J Am Ceram Soc 73: 3269–3277. |
| [11] |
Chaim R (2008) Activation energy and grain growth in polycrystalline Y-TZP ceramics. Mater Sci Eng A 486: 439–446. doi: 10.1016/j.msea.2007.09.022
|
| [12] | Wang J, Conrad H (2015) Grain boundary curvature measurements in annealed yttria‐stabilized zirconia (3Y‐TZP) and their relation to mean grain size. J Am Ceram Soc 1–3. |
| [13] | Smith CS, Guttman L (1953) Measurement of internal boundaries in three-dimensional structures by random sectioning. Trans AIME 197: 81–87. |
| [14] | Wang J, Conrad H (2013) Grain boundary resistivity in yttria-stabilized zirconia. Processing and Properties of Advanced Ceramics and Composites V: Ceramic Trans. 240: 175–188. |
| [15] | Vandermeer RA (1967) A transient effect in grain boundary migration during recrystallization in aluminum. Acta Metall 156: 447–458. |
| [16] |
Wang J, Conrad H (2014) Contribution of the space charge to the grain boundary energy in yttria-stabilized zirconia. J Mater Sci 49: 6074–6080. doi: 10.1007/s10853-014-8331-z
|
| [17] | Chen I-W, Xue LA (1990) Development of superplastic structural ceramics. J Am Ceram Soc 73: 2585–2609. |
| [18] |
Clark MA, Alden TH (1973) Deformation enhanced grain growth in superplastic Sn-1% Bi alloy. Acta Metall 21: 1195–1206. doi: 10.1016/0001-6160(73)90160-0
|
| [19] | Grey EA, Higgins GT (1972) Solute limited grain boundary migration: A rationalisation of grain growth. Acta Metall 21: 309–321. |
| [20] | Yang Di, Conrad H (2008) Retardation of grain growth and cativation during superplastic deformation of ultrafine-grained 3 Y-TZP at 1450–1600 oC. J Mater Sci 43: 4475–4483. |
| [21] | Ma Y, Langdon TG (1994) A critical assessment of flow and cavity formation in a superplastic yttria-stabilized zirconia. Acta Metall Mater 42: 2753–2761. |
| [22] | Stowell RJ (1982) Cavitation in superplasticity in Superplastic Forming of Structural Alloys, N. E. Paton, C. H. Hamilton, eds., TMS, Warrendals, PA, 321–336. |
| [23] | Chokshi AH, Langdon TG (1987) A model for diffusional cavity growth in superplasticity. Acta Metall 15: 1089–1101. |
| [24] | Tsoga A, Nikolopoulos P (1996) Surface and grain-boundary energies in yttria-stabilized zirconia (YSZ-8 mol%). J Mater Sci 316: 5409–5413. |
| [25] | Wang J, Du A, Yang D, et al. (2013) Grain boundary resistivity of yttria-stabilized zirconia at 1400 oC. J Ceram 2013. |
| [26] | Wang J, Yang D, Conrad H (2013) Transient-regime grain growth in nanocrystalline yttria-stabilized zirconia annealed without and with a DC electric field. Scripta Mater 69: 351–353. |
| [27] | Shewmon PG (1963) Diffusion in Solids, McGraw-Hill, New York, 62–65. |
| [28] |
Cachadiña I, Solier JD, Dominguez-Rodriguez A (1995) Activation entropy and Gibbs free energy for conduction in yttria-stabilized zirconia single crystals. Phys Rev B 52: 10872–10876. doi: 10.1103/PhysRevB.52.10872
|
Figures(9)

Jun Wang, Hans Conrad. On the dynamic compared to static grain growth rate in 3 mole% yttria-stabilized tetragonal zirconia polycrystals (3 Y-TZP)[J]. AIMS Materials Science, 2016, 3(3): 1208-1221. doi: 10.3934/matersci.2016.3.1208







 DownLoad:
DownLoad: