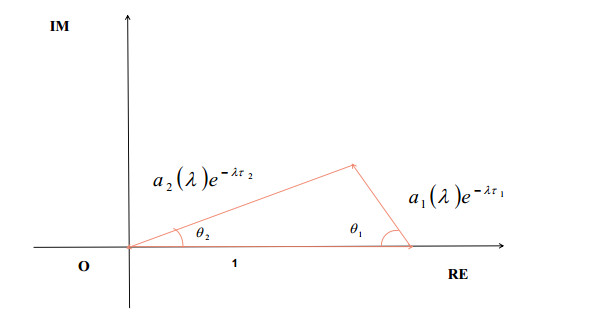
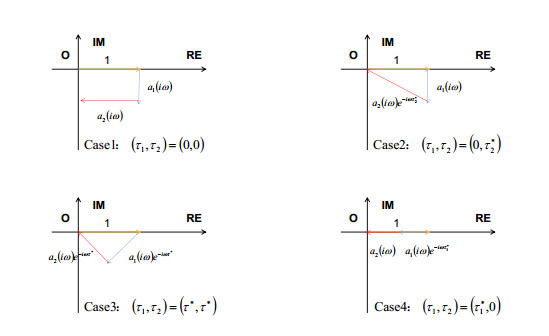
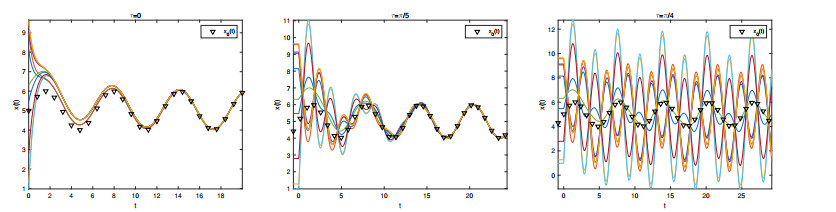
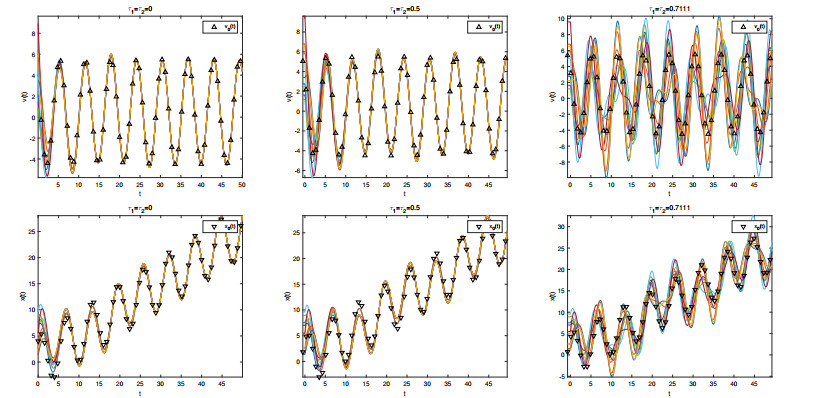
The time delay may induce oscillatory behaviour in multi-agent systems, which may destroy the consensus of the system. Therefore, the critical delay that is the maximum value of the delay to guarantee the consensus of the system, is an important performance index of multi-agent systems. This paper studies the influence of the processing delay on the consensus for a class of multi-agent system involving task strategies. The first-order system with a single delay and the second-order system with two different delays are investigated respectively. A critical delay independent of strategies and a critical region of the 2-D plane that depends on strategies is obtained for the first-order and the second-order system respectively. Specifically, a geometric method was used for the case of two different delays. Several numerical simulations are presented to explain the results.
Citation: Yipeng Chen, Yicheng Liu, Xiao Wang. The critical delay of the consensus for a class of multi-agent system involving task strategies[J]. Networks and Heterogeneous Media, 2023, 18(2): 513-531. doi: 10.3934/nhm.2023021
The time delay may induce oscillatory behaviour in multi-agent systems, which may destroy the consensus of the system. Therefore, the critical delay that is the maximum value of the delay to guarantee the consensus of the system, is an important performance index of multi-agent systems. This paper studies the influence of the processing delay on the consensus for a class of multi-agent system involving task strategies. The first-order system with a single delay and the second-order system with two different delays are investigated respectively. A critical delay independent of strategies and a critical region of the 2-D plane that depends on strategies is obtained for the first-order and the second-order system respectively. Specifically, a geometric method was used for the case of two different delays. Several numerical simulations are presented to explain the results.

| [1] |
R. Olfati-Saber, J. A. Fax, R. M. Murray, Consensus and cooperation in cetworked multi-Agent systems, Proc IEEE Inst Electr Electron Eng, 93 (2007), 215–233. https://doi.org/10.1016/j.lithos.2006.03.065 doi: 10.1016/j.lithos.2006.03.065

|
| [2] |
F. Cucker, S. Smale, Emergent behavior in flocks, IEEE Trans. Automat. Contr., 52 (2007), 852–862. https://doi.org/10.1109/TAC.2007.895842 doi: 10.1109/TAC.2007.895842
|
| [3] |
M. Brambilla, E. Ferrante, M. Birattari, M. Dorigo, Swarm robotics: a review from the swarm engineering perspective, Swarm Intell., 7 (2013), 1–41. https://doi.org/10.1007/s11721-012-0075-2 doi: 10.1007/s11721-012-0075-2
|
| [4] |
J. A. Carrillo, Y. P. Choi, P. B. Mucha, J. Peszek, Sharp condition to avoid collisions in singular Cucker-Smale interactions, Nonlinear Anal Real World Appl, 37 (2017), 317–328. https://doi.org/10.1016/j.nonrwa.2017.02.017 doi: 10.1016/j.nonrwa.2017.02.017
|
| [5] |
J. Hu, H. Zhang, L. Liu, X. Zhu, C. Zhao, Q. Pan, Convergent multiagent formation control with collision avoidance, IEEE Trans. Robot., 36 (2020), 1805–1818. https://doi.org/10.1109/TRO.2020.2998766 doi: 10.1109/TRO.2020.2998766
|
| [6] | K. K. Oh, M. C. Park, H. S. Ahn, A survey of multi-agent formation control, Automatica, 53 (2015), 424–440. |
| [7] |
Y. P. Choi, D. Kalise, J. Peszek, A. P. Andres, A Collisionless Singular Cucker-Smale model with decentralized formation control, SIAM J. Appl. Dyn. Syst., 18 (2019), 1954–1981. https://doi.org/10.1137/19M1241799 doi: 10.1137/19M1241799
|
| [8] |
D. V. Dimarogonas, E. Frazzoli, K. H. Johansson, Distributed event-triggered control for multi-agent systems, IEEE Trans. Automat. Contr., 57 (2012), 1291–1297. https://doi.org/10.1109/TAC.2011.2174666 doi: 10.1109/TAC.2011.2174666
|
| [9] |
X. Chen, H. Yu, F. Hao, Prescribed-time event-triggered bipartite consensus of multiagent systems, IEEE Trans Cybern, 52 (2022), 2589–2598. https://doi.org/10.1109/TCYB.2020.3004572 doi: 10.1109/TCYB.2020.3004572
|
| [10] |
Z. Li, G. Wen, Z. Duan, W. Ren, Designing fully distributed consensus protocols for linear multi-agent systems with directed graphs, IEEE Trans. Automat. Contr., 60 (2015), 1152–1157. https://doi.org/10.1109/TAC.2014.2350391 doi: 10.1109/TAC.2014.2350391
|
| [11] |
X. Jin, S. Lü, C. Deng, M. Chadli, Distributed adaptive security consensus control for a class of multi-agent systems under network decay and intermittent attacks, Inf. Sci., 547 (2021), 88–102. https://doi.org/10.1016/j.ins.2020.08.013 doi: 10.1016/j.ins.2020.08.013
|
| [12] |
S. Yu, X. Long, Finite-time consensus for second-order multi-agent systems with disturbances by integral sliding mode, Automatica, 54 (2015), 158–165. https://doi.org/10.1016/j.automatica.2015.02.001 doi: 10.1016/j.automatica.2015.02.001
|
| [13] |
H. Du, G. Wen, D. Wu, Y. Cheng, J. Lü, Distributed fixed-time consensus for nonlinear heterogeneous multi-agent systems, Automatica, 113 (2020), 108797. https://doi.org/10.1016/j.automatica.2019.108797 doi: 10.1016/j.automatica.2019.108797
|
| [14] |
J. Liu, Y. Zhang, Y. Yu, C. Sun, Fixed-time leader–follower consensus of networked nonlinear systems via event/self-triggered control, IEEE Trans Neural Netw Learn Syst, 31 (2020), 5029–5037. https://doi.org/10.1109/TNNLS.2019.2957069 doi: 10.1109/TNNLS.2019.2957069
|
| [15] |
Y. Hong, G. Chen, L. Bushnell, Distributed observers design for leader-following control of multi-agent networks, Automatica, 44 (2008), 846–850. https://doi.org/10.1016/j.automatica.2007.07.004 doi: 10.1016/j.automatica.2007.07.004
|
| [16] |
J. Shen, Cucker-Smale flocking under hierarchical leadership, SIAM J Appl Math, 68 (2008), 694–719. https://doi.org/10.1137/060673254 doi: 10.1137/060673254
|
| [17] |
J. Ni, P. Shi, Adaptive neural network fixed-time leader–follower consensus for multiagent systems with constraints and disturbances, IEEE Trans Cybern, 51 (2021), 1835–1848. https://doi.org/10.1109/TCYB.2020.2967995 doi: 10.1109/TCYB.2020.2967995
|
| [18] |
B. Piccoli, N. P. Duteil, B. Scharf, Optimal control of a collective migration model, Math Models Methods Appl Sci, 26 (2016), 383–417. https://doi.org/10.1142/S0218202516400066 doi: 10.1142/S0218202516400066
|
| [19] |
Y. Chen, Y. Liu, Flocking dynamics for a multiagent system involving task strategy, Math Models Methods Appl Sci, 46 (2023), 604–621. https://doi.org/10.1002/mma.8532 doi: 10.1002/mma.8532
|
| [20] | Y. Liu, J. Wu, Flocking and asymptotic velocity of the Cucker-Smale model with processing delay, J. Math. Anal. Appl., 415 (2014), 53-61. |
| [21] | Y. Liu, J. Wu, Opinion consensus with delay when the zero eigenvalue of the connection matrix is semi-simple, J Dyn Differ Equ, 29 (2016), 1–13. |
| [22] |
M. R. Cartabia, Cucker-Smale model with time delay, Discrete Contin Dyn Syst Ser A, 42 (2022), 2409–2432. https://doi.org/10.3934/dcds.2021195 doi: 10.3934/dcds.2021195
|
| [23] | X. Wang, L. Wang, J. Wu, Impacts of time delay on flocking dynamics of a two-agent flock model, Commun Nonlinear Sci Numer Simul, 70 (2019), 80–88. |
| [24] |
J. Haskovec, I. Markou, Asymptotic flocking in the Cucker-Smale model with reaction-type delays in the non-oscillatory regime, Kinet. Relat. Models, 13 (2020), 795–813. https://doi.org/10.3934/krm.2020027 doi: 10.3934/krm.2020027
|
| [25] |
Y. Liu, J. Wu, X. Wang, Collective periodic motions in a multiparticle model involving processing delay, Math. Methods Appl. Sci., 44 (2021), 3280–3302. https://doi.org/10.1002/mma.6939 doi: 10.1002/mma.6939
|
| [26] |
R. Olfsti-Saber, R. M. Murray, Consensus problem in networks of agents with switching topology and time-delays, IEEE Trans. Automat. Contr., 49 (2004), 1520–1533. https://doi.org/10.1109/TAC.2004.834113 doi: 10.1109/TAC.2004.834113
|
| [27] |
W. Yu, G. Chen, M. Cao, Some necessary and sufficient conditions for second-order consensus in multi-agent dynamical systems, Automatica, 46 (2010), 1089–1095. https://doi.org/10.1016/j.automatica.2010.03.006 doi: 10.1016/j.automatica.2010.03.006
|
| [28] |
D. Ma, R. Tian, A. Zulfiqar, J. Chen, T. Chai, Bounds on delay consensus margin of second-order multiagent systems with robust position and velocity feedback protocol, IEEE Trans. Automat. Contr., 64 (2019), 3780–3787. https://doi.org/10.1109/TAC.2018.2884154 doi: 10.1109/TAC.2018.2884154
|
| [29] | D. Ma, J. Chen, R. Lu, J. Chen, T. Chai, Delay effect on First-Order consensus over directed graphs: optimizing PID protocols for maximal robustness, SIAM J Control Optim, 60 (2022), 233–258. |
| [30] |
W. Yu, G. Chen, M. Cao, W. Ren, Delay-induced consensus and quasi-consensus in multi-agent dynamical systems, IEEE Trans Circuits Syst I Regul Pap, 60 (2013), 2679–2687. https://doi.org/10.1109/TCSI.2013.2244357 doi: 10.1109/TCSI.2013.2244357
|
| [31] |
W. Hou, M. Fu, H. Zhang, Z. Wu, Consensus conditions for general second-order multi-agent systems with communication delay, Automatica, 75 (2017), 293–298. https://doi.org/10.1016/j.automatica.2016.09.042 doi: 10.1016/j.automatica.2016.09.042
|
| [32] |
Q. Ma, S. Xu, Consensus switching of second-order multiagent systems with time delay, IEEE Trans Cybern, 52 (2022), 3349–3353. https://doi.org/10.1109/TCYB.2020.3011448 doi: 10.1109/TCYB.2020.3011448
|
| [33] | J. K. Hale, S. M. V. Lunel, Introduction to Functional Differential Equations, Berlin: Springer-Verlag, 1993. |
| [34] |
E. Beretta, Y. Kuang, Geometric stability switch criteria in delay differential systems with delay dependent parameters, SIAM J. Math. Anal., 33 (2002), 1144–1165. https://doi.org/10.1137/S0036141000376086 doi: 10.1137/S0036141000376086
|
| [35] | K. Gu, S. I. Niculescu, J. Chen, On stability crossing curves for general systems with two delays, J. Math. Anal. Appl., 331 (2005), 231–253. |
| [36] |
Q. Ma, S. Xu, Exact delay bounds of second-order multi-agent systems with input and communication delays, IEEE Trans. Circuits Syst. II Express Briefs, 69 (2022), 1119-1123. https://doi.org/10.1109/TCSII.2021.3094185 doi: 10.1109/TCSII.2021.3094185
|
| [37] |
L. hang, X. Li, Z. Mao, J. Chen, G. Fan, Some new algebraic and geometric analysis for local stability crossing curves, Automatica, 123 (2021), 109312. https://doi.org/10.1016/j.automatica.2020.109312 doi: 10.1016/j.automatica.2020.109312
|
Figures(6) / Tables(2)
Yipeng Chen, Yicheng Liu, Xiao Wang. The critical delay of the consensus for a class of multi-agent system involving task strategies[J]. Networks and Heterogeneous Media, 2023, 18(2): 513-531. doi: 10.3934/nhm.2023021







 DownLoad:
DownLoad: