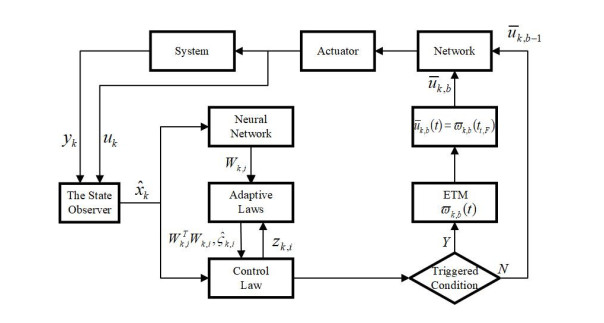
An adaptive neural network event-triggered consensus control method incorporating a state observer was proposed for a class of uncertain nonlinear multi-agent systems (MASs) with actuator failures. To begin, a state observer was constructed in an adaptive backstepping framework to estimate the MASs' unmeasurable states, and a radial basis function neural network (RBFNN) was employed to approximate the unknown nonlinear function of MASs. Meanwhile, to reduce the impact of actuator failure on the performance of MASs, the adaptive event-triggered mechanism (ETM) was designed to dynamically compensate for actuator failures, which alleviated the communication burden among individual agents by decreasing the update frequency of the control signals. Furthermore, all followers can track the leader's output signal with the synchronization errors converging to zero. Finally, simulation examples were used to verify the effectiveness of the proposed control strategy.
Citation: Kairui Chen, Yongping Du, Shuyan Xia. Adaptive state observer event-triggered consensus control for multi-agent systems with actuator failures[J]. AIMS Mathematics, 2024, 9(9): 25752-25775. doi: 10.3934/math.20241258
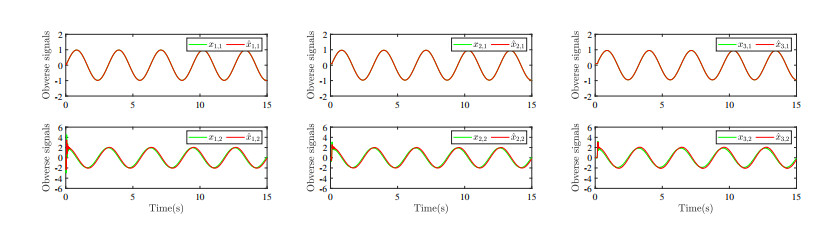
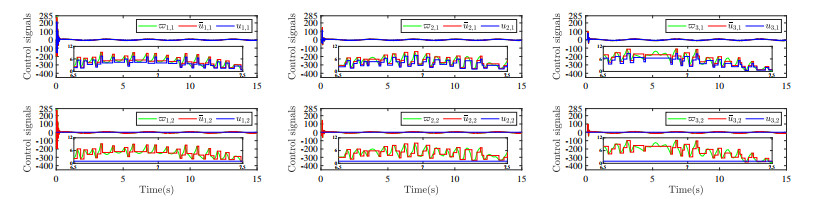
An adaptive neural network event-triggered consensus control method incorporating a state observer was proposed for a class of uncertain nonlinear multi-agent systems (MASs) with actuator failures. To begin, a state observer was constructed in an adaptive backstepping framework to estimate the MASs' unmeasurable states, and a radial basis function neural network (RBFNN) was employed to approximate the unknown nonlinear function of MASs. Meanwhile, to reduce the impact of actuator failure on the performance of MASs, the adaptive event-triggered mechanism (ETM) was designed to dynamically compensate for actuator failures, which alleviated the communication burden among individual agents by decreasing the update frequency of the control signals. Furthermore, all followers can track the leader's output signal with the synchronization errors converging to zero. Finally, simulation examples were used to verify the effectiveness of the proposed control strategy.

| [1] |
M. Shahriari-kahkeshi, N. Meskin, Adaptive cooperative control of nonlinear multi-agent systems with uncertain time-varying control directions and dead-zone nonlinearity, Neurocomputing, 464 (2021), 151–163. https://doi.org/10.1016/j.neucom.2021.08.065 doi: 10.1016/j.neucom.2021.08.065

|
| [2] |
X. D. Li, Y. Z. Lv, G. H. Wen, X. H. Yu, Tracking consensus of multi-agent systems with varying number of agents under actuator attacks, IEEE Trans. Circuits Syst. II, 70 (2023), 4514–4518. https://doi.org/10.1109/TCSII.2023.3289847 doi: 10.1109/TCSII.2023.3289847
|
| [3] |
M. Z. Xia, Z. C. Liu, T. P. Zhang, Distributed adaptive cooperative control via command filters for multi-agent systems including input unmodeled dynamics and sensor faults, Appl. Math. Comput., 457 (2023), 128194. https://doi.org/10.1016/j.amc.2023.128194 doi: 10.1016/j.amc.2023.128194
|
| [4] |
G. L. Xiao, J. R. Wang, D. Shen, Adaptive fixed-time consensus for stochastic multi-agent systems with uncertain actuator faults, ISA Trans., 137 (2023), 369–378. https://doi.org/10.1016/j.isatra.2023.01.003 doi: 10.1016/j.isatra.2023.01.003
|
| [5] |
J. X. Chen, J. M. Li, S. Y. Liu, A. L. Zhao, Adaptive neural consensus of nonlinearly parameterized multi-agent systems with periodic disturbances, ISA Trans., 126 (2022), 160–170. https://doi.org/10.1016/j.isatra.2021.07.024 doi: 10.1016/j.isatra.2021.07.024
|
| [6] |
G. Y. Bao, L. F. Ma, X. J. Yi, Recent advances on cooperative control of heterogeneous multi-agent systems subject to constraints: a survey, Syst. Sci. Control Eng., 10 (2022), 539–551. https://doi.org/10.1080/21642583.2022.2074169 doi: 10.1080/21642583.2022.2074169
|
| [7] | J. Sun, J. X. Zhang, L. Liu, Y. M. Wu, Q. H. Shan, Output consensus control of multi-agent systems with switching networks and incomplete leader measurement, IEEE Trans. Autom. Sci. Eng., 2022, 1–10. https://doi.org/10.1109/TASE.2023.3328897 |
| [8] |
W. L. Cheng, K. Zhang, B. Jiang, S. X. Ding, Fixed-fime fault-tolerant formation control for heterogeneous multi-agent systems with parameter uncertainties and disturbances, IEEE Trans. Circuits Syst. I, 68 (2021), 2121–2133. https://doi.org/10.1109/TCSI.2021.3061386 doi: 10.1109/TCSI.2021.3061386
|
| [9] |
Z. B. Lin, Z. Liu, C. Y. Su, Y. N. Wang, C. L. P. Chen, Y. Zhang, Adaptive fuzzy prescribed performance output-feedback cooperative control for uncertain nonlinear multiagent systems, IEEE Trans. Fuzzy Syst., 31 (2023), 4459–4470. https://doi.org/10.1109/TFUZZ.2023.3285649 doi: 10.1109/TFUZZ.2023.3285649
|
| [10] |
S. C. Tong, M. Xiao, Y. X. Li, Observer-based adaptive fuzzy tracking control for strict-feedback nonlinear systems with unknown control gain function, IEEE Trans. Cybern., 50 (2020), 3903–3913. https://doi.org/10.1109/TCYB.2020.2977175 doi: 10.1109/TCYB.2020.2977175
|
| [11] |
D. Cui, C. K. Ahn, Z. R. Xiang, Fault-tolerant fuzzy observer-based fixed-time tracking control for nonlinear switched systems, IEEE Trans. Fuzzy Syst., 31 (2023), 4410–4420. https://doi.org/10.1109/TFUZZ.2023.3284917 doi: 10.1109/TFUZZ.2023.3284917
|
| [12] |
G. D. Zong, Y. D. Wang, H. R. Karimi, K. B. Shi, Observer-based adaptive neural tracking control for a class of nonlinear systems with prescribed performance and input dead-zone constraints, Neural Networks, 147 (2022), 126–135. https://doi.org/10.1016/j.neunet.2021.12.019 doi: 10.1016/j.neunet.2021.12.019
|
| [13] |
X. Y. Chen, F. Zhao, Y. Liu, H. W. Liu, T. W. Huang, J. L. Qiu, Reduced-order observer-based preassigned finite-time control of nonlinear systems and its applications, IEEE Trans. Syst., Man, Cybern.: Syst., 53 (2023), 4205–4215. https://doi.org/10.1109/TSMC.2023.3241365 doi: 10.1109/TSMC.2023.3241365
|
| [14] |
Y. X. Lian, J. W. Xia, J. H. Park, W. Sun, H. Shen, Disturbance observer-based adaptive neural network output feedback control for uncertain nonlinear systems, IEEE Trans. Neural Networks Learn. Syst., 34 (2023), 7260–7270. https://doi.org/10.1109/TNNLS.2021.3140106 doi: 10.1109/TNNLS.2021.3140106
|
| [15] |
H. Q. Wang, J. W. Ma, X. D. Zhao, B. Niu, M. Chen, W. Wang, Adaptive fuzzy fixed-time control for high-order nonlinear systems with sensor and actuator faults, IEEE Trans. Fuzzy Syst., 31 (2023), 2658–2668. https://doi.org/10.1109/TFUZZ.2023.3235395 doi: 10.1109/TFUZZ.2023.3235395
|
| [16] |
C. Sun, Y. Lin, Adaptive output feedback compensation for a class of nonlinear systems with actuator and sensor failures, IEEE Trans. Syst., Man, Cybern.: Syst., 52 (2022), 4762–4771. https://doi.org/10.1109/TSMC.2021.3103908 doi: 10.1109/TSMC.2021.3103908
|
| [17] |
Z. Y. Ma, H. B. Kang, H. J. Ma, Adaptive output-Feedback asymptotic tracking control for a class of nonlinear systems with actuator failure, J. Franklin Inst., 359 (2022), 1881–1898. https://doi.org/10.1016/j.jfranklin.2022.01.037 doi: 10.1016/j.jfranklin.2022.01.037
|
| [18] |
Y. Sun, P. Shi, C. C. Lim, Adaptive consensus control for output-constrained nonlinear multi-agent systems with actuator faults, J. Franklin Inst., 359 (2022), 4216–4232. https://doi.org/10.1016/j.jfranklin.2022.03.025 doi: 10.1016/j.jfranklin.2022.03.025
|
| [19] |
Y. T. Cao, B. Q. Li, S. P. Wen, T. W. Huang, Consensus tracking of stochastic multi-agent system with actuator faults and switching topologies, Inf. Sci., 607 (2022), 921–930. https://doi.org/10.1016/j.ins.2022.06.009 doi: 10.1016/j.ins.2022.06.009
|
| [20] |
J. S. Zhao, Y. Lin, Adaptive actuator failure compensation control: a new scheme based on fault detection and isolation, IEEE/ASME Trans. Mechatron., 28 (2023), 2236–2247. https://doi.org/10.1109/TMECH.2022.3232574 doi: 10.1109/TMECH.2022.3232574
|
| [21] |
Y. Liu, L. Li, Adaptive leader-follower consensus control of multiple flexible manipulators with actuator failures and parameter uncertainties, IEEE/CAA J. Autom. Sin., 10 (2023), 1020–1031. https://doi.org/10.1109/JAS.2023.123093 doi: 10.1109/JAS.2023.123093
|
| [22] |
Y. Yang, X. Fan, W. N. Gao, W. B. Yue, A. Liu, S. C. Geng, et al., Event-triggered output feedback control for a class of nonlinear systems via disturbance observer and adaptive dynamic programming, IEEE Trans. Fuzzy Syst., 31 (2023), 3148–3160. https://doi.org/10.1109/TFUZZ.2023.3245294 doi: 10.1109/TFUZZ.2023.3245294
|
| [23] |
S. Al Issa, I. Kar, Event-triggered adaptive control of uncertain non-linear systems under input delay and limited resources, Int. J. Dynam. Control, 9 (2021), 1703–1710. https://doi.org/10.1007/s40435-021-00767-7 doi: 10.1007/s40435-021-00767-7
|
| [24] |
Y. Wang, Y. H. Yang, L. B. Wu, Adaptive fault-tolerant consensus control of multi-agent systems with event-triggered input, Inf. Sci., 650 (2023), 119594. https://doi.org/10.1016/j.ins.2023.119594 doi: 10.1016/j.ins.2023.119594
|
| [25] |
J. H. Wang, J. R. Liu, Y. H. Li, C. L. P. Chen, Z. Liu, F. Y. Li, Prescribed time fuzzy adaptive consensus control for multiagent systems with dead-zone input and sensor faults, IEEE Trans. Autom. Sci. Eng., 21 (2023), 4016–4027. https://doi.org/10.1109/TASE.2023.3291716 doi: 10.1109/TASE.2023.3291716
|
| [26] |
L. Cao, Q. Zhou, G. W. Dong, H. Y. Li, Observer-based adaptive event-triggered control for nonstrict-feedback nonlinear systems with output constraint and actuator failures, IEEE Trans. Syst., Man, Cybern.: Syst., 51 (2021), 1380–1391. https://doi.org/10.1109/TSMC.2019.2895858 doi: 10.1109/TSMC.2019.2895858
|
| [27] |
Y. X. Li, Z. Hou, W. W. Che, Z. G. Wu, Event-based design of finite-time adaptive control of uncertain nonlinear systems, IEEE Trans. Neural Networks Learn. Syst., 33 (2022), 3804–3813. https://doi.org/10.1109/TNNLS.2021.3054579 doi: 10.1109/TNNLS.2021.3054579
|
| [28] |
J. J. Chen, P. Jiang, B. S. Chen, Z. G. Zeng, Adaptive neural event-triggered consensus control for unknown nonlinear second-order delayed multi-agent systems, Neurocomputing, 598 (2024), 128067. https://doi.org/10.1016/j.neucom.2024.128067 doi: 10.1016/j.neucom.2024.128067
|
| [29] |
T. T. Chen, B. Niu, J. M. Zhang, D. Wang, Z. H. Wang, Time-/event-triggered adaptive neural asymptotic tracking control of nonlinear interconnected systems with unmodeled dynamics and prescribed performance, IEEE Trans. Neural Networks Learn. Syst., 34 (2023), 6557–6567. https://doi.org/10.1109/TNNLS.2021.3129228 doi: 10.1109/TNNLS.2021.3129228
|
| [30] |
J. H. Wang, C. Wang, Z. Liu, C. L. P. Chen, C. L. Zhang, Practical fixed-time adaptive erbfnns event-triggered control for uncertain nonlinear systems with dead-zone constraint, IEEE Trans. Syst., Man, Cybern.: Syst., 54 (2023), 342–351. https://doi.org/10.1109/TSMC.2022.3211658 doi: 10.1109/TSMC.2022.3211658
|
| [31] |
J. H. Wang, Y. C. Yan, Z. Liu, C. L. P. Chen, C. L. Zhang, K. R. Chen, Finite-time consensus control for multi-agent systems with full-state constraints and actuator failures, Neural Networks, 157 (2023), 350–363. https://doi.org/10.1016/j.neunet.2022.10.028 doi: 10.1016/j.neunet.2022.10.028
|
| [32] |
D. J. Yao, C. X. Dou, N. Zhao, T. J. Zhang, Practical fixed-time adaptive consensus control for a class of multi-agent systems with full state constraints and input delay, Neurocomputing, 446 (2021), 156–164. https://doi.org/10.1016/j.neucom.2021.03.032 doi: 10.1016/j.neucom.2021.03.032
|
| [33] |
J. H. Wang, Q. J. Gong, K. F. Huang, Z. Liu, C. L. P. Chen, J. Liu, Event-triggered prescribed settling time consensus compensation control for a class of uncertain nonlinear systems with actuator failures, IEEE Trans. Neural Networks Learn. Syst., 34 (2023), 5590–5600. https://doi.org/10.1109/TNNLS.2021.3129816 doi: 10.1109/TNNLS.2021.3129816
|
| [34] |
Y. Zhao, H. Yu, X. H. Xia, Event-triggered adaptive control of multi-agent systems with saturated input and partial state constraints, J. Franklin Inst., 359 (2022), 3333–3365. https://doi.org/10.1016/j.jfranklin.2022.04.004 doi: 10.1016/j.jfranklin.2022.04.004
|
| [35] |
W. Wang, D. Wang, Z. H. Peng, T. S. Li, Prescribed performance consensus of uncertain nonlinear strict-feedback systems with unknown control directions, IEEE Trans. Syst., Man, Cybern.: Syst., 46 (2016), 1279–1286. https://doi.org/10.1109/TSMC.2015.2486751 doi: 10.1109/TSMC.2015.2486751
|
Figures(14) / Tables(1)

Kairui Chen, Yongping Du, Shuyan Xia. Adaptive state observer event-triggered consensus control for multi-agent systems with actuator failures[J]. AIMS Mathematics, 2024, 9(9): 25752-25775. doi: 10.3934/math.20241258







 DownLoad:
DownLoad: