Floating platforms are complex structures used in deep water and high wind speeds. However, a methodology should be defined to have a stable offshore structure and not fail dynamically in severe environmental conditions. This paper aims to provide a method for estimating failure load or ultimate load on the anchors of floating systems in integrating wind and tidal turbines in New Zealand. Using either wind or tidal turbines in areas with harsh water currents is not cost-effective. Also, tidal energy, as a predictable source of energy, can be an alternative for wind energy when cut-in speed is not enough to generate wind power. The most expensive component after the turbine is the foundation. Using the same foundation for wind and tidal turbines may reduce the cost of electricity. Different environment scenarios as load cases have been set up to test the proposed system's performance, capacity and efficiency. Available tidal records from the national institute of Water and Atmospheric Research (NIWA) have been used to find the region suitable for offshore energy generation and to conduct simulation model runs. Based on the scenarios, Terawhiti in Cook Strait with 110 m water height was found as the optimized site. It can be seen that the proposed floating hybrid system is stable in the presence of severe environmental conditions of wind and wave loadings in Cook Strait and gives a procedure for sizing suction caisson anchors.
Citation: Navid Majdi Nasab, Jeff Kilby, Leila Bakhtiaryfard. Integration of wind and tidal turbines using spar buoy floating foundations[J]. AIMS Energy, 2022, 10(6): 1165-1189. doi: 10.3934/energy.2022055
Floating platforms are complex structures used in deep water and high wind speeds. However, a methodology should be defined to have a stable offshore structure and not fail dynamically in severe environmental conditions. This paper aims to provide a method for estimating failure load or ultimate load on the anchors of floating systems in integrating wind and tidal turbines in New Zealand. Using either wind or tidal turbines in areas with harsh water currents is not cost-effective. Also, tidal energy, as a predictable source of energy, can be an alternative for wind energy when cut-in speed is not enough to generate wind power. The most expensive component after the turbine is the foundation. Using the same foundation for wind and tidal turbines may reduce the cost of electricity. Different environment scenarios as load cases have been set up to test the proposed system's performance, capacity and efficiency. Available tidal records from the national institute of Water and Atmospheric Research (NIWA) have been used to find the region suitable for offshore energy generation and to conduct simulation model runs. Based on the scenarios, Terawhiti in Cook Strait with 110 m water height was found as the optimized site. It can be seen that the proposed floating hybrid system is stable in the presence of severe environmental conditions of wind and wave loadings in Cook Strait and gives a procedure for sizing suction caisson anchors.

| [1] |
Li L (2018) Dynamic response and power production of a floating integrated wind, wave and tidal energy system. Renewable Energy 116: 412–422. https://doi.org/10.1016/j.renene.2017.09.080 doi: 10.1016/j.renene.2017.09.080

|
| [2] |
Noori M, Kucukvar M, Tatari O (2015) Economic input‑output based sustainability analysis of onshore and offshore wind energy systems. Int J Green Energy 12: 939–948. https://doi.org/10.101080/15435075.2014.890103 doi: 10.101080/15435075.2014.890103
|
| [3] |
Heptonstall P, Gross R, Greenacre P, et al. (2012) The cost of offshore wind: Understanding the past and projecting the future. Energy Policy 41: 815–821. https://doi.org/10.1016/j.enpol.2011.11.050 doi: 10.1016/j.enpol.2011.11.050
|
| [4] |
Majdi Nasab N, Raabiul Islam Md, Muttaqi K, et al. (2021) Optimization of a grid-connected microgrid using tidal and wind energy in Cook Strait. Fluids 6: 426. https://doi.org/10.3390/fluids6120426 doi: 10.3390/fluids6120426
|
| [5] | Gruszczynski A, Hambrey D, Romero Jimenez E, et al. (2017) Hybrid offshore wind and tidal. Available from: http://www.esru.strath.ac.uk/EandE/Web_sites/16-17/WindAndTidal/index.html. |
| [6] |
Zhao T, Xu M, Xiao X, et al. (2021) Recent progress in blue energy harvesting for powering distributed sensors in ocean. Nano Energy 88: 106199. https://doi.org/10.1016/j.nanoen.2021.106199 doi: 10.1016/j.nanoen.2021.106199
|
| [7] |
Sarma N, Tuohy PM, Mohammed A, et al. (2021) Rotor electrical fault detection in DFIGs using wide-band controller signals. IEEE Trans Sustainable Energy 12: 623–633. https://doi.org/10.1109/tste.2020.3014446 doi: 10.1109/tste.2020.3014446
|
| [8] | Karumalai D, Palanisamy AP, Palanisamy AK, et al. (2020) Offshore integrated renewable power system. In IOP Conference Series: Mater Sci Eng IOP Publishing. https://doi.org/10.1088/1757-899X/955/1/12074 |
| [9] |
Pérez-Collazo C, Greaves D, Iglesias G (2015) A review of combined wave and offshore wind energy. Renewable Sustainable Energy Rev 42: 141–153. https://doi.org/10.1016/j.rser.2014.09.032 doi: 10.1016/j.rser.2014.09.032
|
| [10] | Christensen ED, Stuiver M, Guanche R, et al. (2015) Go offshore-Combining food and energy production. Technical University of Denmark, Department of Mechanical Engineering. |
| [11] | H2OCEAN. Available from: http://www.vliz.be/projects/mermaidproject/project/related-projects/h2ocean.html. |
| [12] |
Lin YH, Kao SH, Yang CH (2019) Investigation of hydrodynamic forces for floating offshore wind turbines on spar buoys and tension leg platforms with the mooring systems in waves. Appl Sci 9: 608. https://doi.org/10.3390/app9030608 doi: 10.3390/app9030608
|
| [13] |
Arany L, Bhattacharya S (2018) Simplified load estimation and sizing of suction anchors for spar buoy type floating offshore wind turbines. Ocean Eng 159: 348–357. https://doi.org/10.1016/j.oceaneng.2018.04.013 doi: 10.1016/j.oceaneng.2018.04.013
|
| [14] | Mirzaei F, Tavakoli A, Tashakori Z (2018) Stability analysis of TLP floating wind turbine under severe environmental loading condition. Available from: http://hal.archives-ouvertes.fr/hal-01856187. |
| [15] |
Chen C, Ma Y, Fan T (2022) Review of model experimental methods focusing on aerodynamic simulation of floating offshore wind turbines. Renewable Sustainable Energy Rev 157: 112036. https://doi.org/10.1016/j.rser.2021.112036 doi: 10.1016/j.rser.2021.112036
|
| [16] | Farr H, Ruttenberg B, Walter RK, et al. (2021) Potential environmental effects of deepwater floating offshore wind energy facilities. Ocean Coastal Manage 207: 105611. https://doi.org/j.oceoaman.2021.105611 |
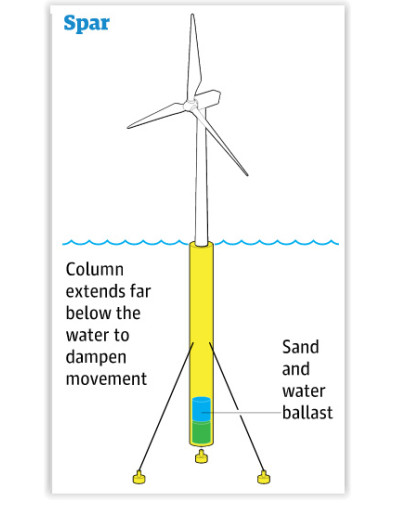
| [17] | Ballast in spar buoy. Available from: https://www.theguardian.com/environment/2014/jun/23/drifting-off-the-coast-of-portugal-the-frontrunner-in-the-global-race-for-floating-windfarms. |
| [18] | Musial W, Butterfield S, Boone A (2004) Feasibility of floating platform systems for wind turbines. In 42nd AIAA aerospace sciences meeting and exhibit. https://doi.org/10.2514/6.2004-1007 |
| [19] | Fontana CM, Arwade SR, Degroot DJ, et al. (2016) Efficient multiline anchor systems for floating offshore wind turbines. In International Conference on Offshore Mechanics and Arctic Engineering. American Society of Mechanical Engineers. https://doi.org/10.1115/OMAE2016-54476 |
| [20] | Diaz BD, Rasulo M, Aubeny CP (2016) Multiline anchors for floating offshore wind towers. In OCEANS 2016 MTS/IEEE Monterey. IEEE. https://doi.org/10.1109/OCEANS.2016.7761374 |
| [21] | Balakrishnan K, Arwade SR, Degroot DJ, et al. (2020) Comparison of multiline anchors for offshore wind turbines with spar and with semisubmersible. J Physics: Conference Series. IOP Publishing. https://doi.org/10.1088/1742-6596/1452/1/012032 |
| [22] |
Goldschmidt M, Muskulus M (2015) Coupled mooring systems for floating wind farms. Energy Procedia 80: 255–262. https://doi.org/10.1016/j.egypro.2015.11.429 doi: 10.1016/j.egypro.2015.11.429
|
| [23] | IEC 61400. Available from: https://en.wikipedia.org/wiki/IEC_61400. |
| [24] | BS EN IEC 61400-3-1: 2019 (2019) Wind energy generation systems. Design requirements for fixed offshore wind turbines. 2019: BSI Standards Limited. Availabe from: https://standards.govt.nz/shop/bs-en-iec-61400-3-12019. |
| [25] | Bortolotti P, Tarres HC, Dykes K, et al. (2019) IEA Wind TCP Task 37: Systems engineering in wind energy-WP2.1 reference wind turbines. National Renewable Energy Lab. (NREL), Golden, CO (United States). https://doi.org/10.2172/1529216 |
| [26] | DNV G (2010) Environmental conditions and environmental loads. Recommend Practice DNV-RP-C205. Available from: https://home.hvl.no/ansatte/tct/FTP/H2021%20Marinteknisk%20Analyse/Regelverk%20og%20standarder/DnV_documents/RP-C205.pdf. |
| [27] | Statoil (2015) Hywind Scotland pilot park—Environmental statement. Available from: https://tethys.pnnl.gov/sites/default/files/publications/Hywind-Pilot-Park-Environmental-Statement.pdf. |
| [28] | Karimirad M (2014) Offshore energy structures: for wind power, wave energy and hybrid marine platforms. Springer. Available from: https://www.amazon.com/Offshore-Energy-Structures-Hybrid-Platforms/dp/331912174X. |
| [29] |
Nasab NM, Kilby J, Bakhtiaryfard L (2021) Case Study of a hybrid wind and tidal turbines system with a microgrid for power supply to a remote off-grid community in New Zealand. Energies 14: 3636. https://doi.org/10.3390/en14123636 doi: 10.3390/en14123636
|
| [30] | Limited D, Johnson D (2008) New Zealand's wave and tidal energy resources and their timetable for development. In International Conference on Ocean Energy (ICOE), Brest. Available from: https://www.semanticscholar.org/paper/New-Zealand-%E2%80%99-s-Wave-and-Tidal-Energy-Resources-and-Limited-Johnson/2a1bca8cc89688a4f8bdafeda4542e5129c0f6df. |
| [31] | Tidal Prediction Using TPX09, 2022. Available from: http://oceanomatics.com/. |
| [32] | Linz information about tides around New Zealand, 2006. Available from: https://www.linz.govt.nz/sea/tides/introduction-tides/tides-around-new-zealand. |
| [33] | Homer Pro (2020) Available from: https://www.homerenergy.com/. |
| [34] | NIWA Tide Forecaster (2020) Available from: https://tides.niwa.co.nz/. |
| [35] | The KNMI/ERA-40 Wave Atlas. (2020) Available from: http://projects.knmi.nl/wave_atlas/atlas_book.html#c57a. |
| [36] | Bhattacharya S (2019) Design of foundations for offshore wind turbines. John Wiley & Sons. Available from: https://www.wiley.com/en-us/Design+of+Foundations+for+Offshore+Wind+Turbines-p-9781119128120. |
| [37] | Weibull Calculator (2020) Available from: https://wind-data.ch/tools/weibull.php. |
| [38] | RETScreen (2018) Available from: https://www.nrcan.gc.ca/maps-tools-publications/tools/data-analysis-software-modelling/retscreen/7465. |
| [39] | Gupta R, Biswas A (2010) Wind data analysis of silchar (assam, India) by rayleighs and weibull methods. J Mechanical Eng Res 2: 010–024. Available from: https://academicjournals.org/journal/JMER/article-full-text-pdf/9428F113700. |
| [40] |
Ayodele TR, Jimoh AA, Munda JL, et al. (2012) Statistical analysis of wind speed and wind power potential of Port Elizabeth using Weibull parameters. J Energy Southern Africa 23: 30–38. https://doi.org/10.17159/2413-3051/2012/v23i2a3160 doi: 10.17159/2413-3051/2012/v23i2a3160
|
| [41] | OPTUM CE (2010) Available from: https://optumce.com/. |
| [42] |
Arany L, Bhattacharya S, Macdonald J, et al. (2017) Design of monopiles for offshore wind turbines in 10 steps. Soil Dynamics Earthquake Eng 92: 126–152. https://doi.org/10.1016/j.soildyn.2016.09.24 doi: 10.1016/j.soildyn.2016.09.24
|
| [43] | Frohboese P, Schmuck C, Hassan GG (2010) Thrust coefficients used for estimation of wake effects for fatigue load calculation. In European Wind Energy Conference. Available from: https://www.semanticscholar.org/paper/THRUST-COEFFICIENTS-USED-FOR-ESTIMATION-OF-WAKE-FOR-Frohboese-Hassan/6f1fdaec4f05daeb839c52e11109e403cf645e0a. |
| [44] | Taihoro Nukurangi (2007) Wave climate around New Zealand. NIWA. Available from: https://niwa.co.nz/our-science/coasts/research-projects/all/physical-hazards-affecting-coastal-margins-and-the-continental-shelf/news/waves#climate. |
| [45] | Crest Energy, 2019. Available from: http://www.crestenergyservices.com. |





Figures(6) / Tables(11)

Navid Majdi Nasab, Jeff Kilby, Leila Bakhtiaryfard. Integration of wind and tidal turbines using spar buoy floating foundations[J]. AIMS Energy, 2022, 10(6): 1165-1189. doi: 10.3934/energy.2022055







 DownLoad:
DownLoad: