In this paper, we study a model of opinion dynamics based on the so-called "bounded confidence" principle introduced by Hegselmann and Krause. Following this principle, voters participating in an electoral decision with two options are influenced by individuals sharing an opinion similar to their own.
We consider a modification of this model where the operator generating the dynamical system which describes the process of formation the final distribution of opinions in the society is defined in two steps. First, to the opinion of an agent, a value proportional to opinions in his/her "influence group" is added, and then the elements of the resulting array are divided by the maximal absolute value of elements to keep the opinions in the prescribed interval. We show that under appropriate conditions, any trajectory tends to a fixed point, and all the remaining fixed points are Lyapunov stable.
Citation: Sergei Yu. Pilyugin, Maria S. Tarasova, Aleksandr S. Tarasov, Grigorii V. Monakov. A model of voting dynamics under bounded confidence with nonstandard norming[J]. Networks and Heterogeneous Media, 2022, 17(6): 917-931. doi: 10.3934/nhm.2022032
In this paper, we study a model of opinion dynamics based on the so-called "bounded confidence" principle introduced by Hegselmann and Krause. Following this principle, voters participating in an electoral decision with two options are influenced by individuals sharing an opinion similar to their own.
We consider a modification of this model where the operator generating the dynamical system which describes the process of formation the final distribution of opinions in the society is defined in two steps. First, to the opinion of an agent, a value proportional to opinions in his/her "influence group" is added, and then the elements of the resulting array are divided by the maximal absolute value of elements to keep the opinions in the prescribed interval. We show that under appropriate conditions, any trajectory tends to a fixed point, and all the remaining fixed points are Lyapunov stable.

| [1] |
Cluster formation in opinion dynamics: A qualitative analysis. Z. Angew. Math. Phys. (2010) 61: 583-602. 
|
| [2] |
Convergence to fixed points in one model of opinion dynamics. J. Dyn. Control. Syst. (2021) 27: 617-623.
|
| [3] |
Asymptotic analysis of continuous opinion dynamics models under bounded confidence. Commun. Pure Appl. Anal. (2013) 12: 1487-1499.
|
| [4] |
Continuous and discontinuous opinion dynamics with bounded confidence. Nonlinear Anal. Real World Appl. (2012) 13: 1239-1251.
|
| [5] |
The Krause – Hegselmann consensus model with discrete opinions. Internat. J. Modern Phys. C (2004) 15: 1021-1029.
|
| [6] |
A formal theory of social power. Psychological Review (1956) 63: 181-194.
|
| [7] |
F. Harary, A criterion for unanimity in French's theory of social power, in Studies in Social Power (ed. D. Cartwright), Institute for Social Research, Ann Arbor, 1959. |
| [8] |
The Hegselmann – Krause dynamics for equally spaced agents. J. Difference Equ. Appl. (2016) 22: 1621-1645.
|
| [9] | Opinion dynamics and bounded confidence: Models, analysis and simulation. Journal of Artificial Societies and Social Simulation (2002) 5: 1-33. |
| [10] |
Clustering and asymptotic behavior in opinion formation. J. Differential Equations (2014) 257: 4165-4187.
|
| [11] |
U. Krause, A discrete nonlinear and non - autonomous model of consensus formation, in Communications in Difference Equations, Gordon and Breach Publ., Amsterdam, 1997. |
| [12] |
U. Krause, Soziale dynamiken mit vielen interakteuren. Eine problemskizze, in Modellierung und Simulation von Dynamiken mit Vielen Interagierenden Akteuren (eds. U. Krause and M. Stockler), Universitat Bremen, 1997. |
| [13] |
Compromise, consensus, and the iteration of means. Elem. Math. (2009) 64: 1-8.
|
| [14] |
U. Krause, Positive Dynamical Systems in Discrete Time. Theory, Models, and Applications, De Gruyter, Berlin, 2015. |
| [15] |
On the Hegselmann – Krause conjecture in opinion dynamics. Journal of Difference Equations and Applications (2011) 17: 859-876.
|
| [16] |
Continuous opinion dynamics under bounded confidence: A survey. International Journal of Modern Physics C (2007) 18: 1819-1838.
|
| [17] |
From classical to modern opinion dynamics. International Journal of Modern Physics C (2020) 31: 2050101.
|
| [18] |
Opinion formation in voting processes under bounded confidence. Networks and Heterogeneous Media (2019) 14: 617-632.
|
| [19] |
Dynamics of a continual sociological model. Vestnik St. Petersburg University: Mathematics (2021) 54: 196-205.
|
| [20] |
W. Ren and Y. Cao, Distributed Coordination of Multi-agent Networks. Emergent Problems, Models, and Issues, Springer, 2011. |
| [21] |
The Hegselmann – Krause dynamics for the continuous-agent model and a regular opinion function do not always lead to consensus. IEEE Trans. Automat. Control (2015) 60: 2416-2421.
|
| [22] |
On the control through leadership of the Hegselmann – Krause opinion formation model. Mathematical Models and Methods in Applied Sciences (2015) 25: 565-585.
|


Figures(3)
Sergei Yu. Pilyugin, Maria S. Tarasova, Aleksandr S. Tarasov, Grigorii V. Monakov. A model of voting dynamics under bounded confidence with nonstandard norming[J]. Networks and Heterogeneous Media, 2022, 17(6): 917-931. doi: 10.3934/nhm.2022032

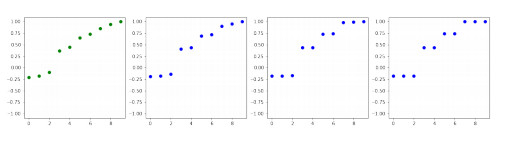
Initial distribution and opinions' evolution of system with (6) at steps 10, 30 and 70;
Initial distribution and opinions' evolution of system with Condition A at steps 20, 40 and 90;
Initial distribution and opinions' evolution for third example at steps 10, 30 and 70, when the equilibrium is reached;






 DownLoad:
DownLoad: