This study aims to design a generalized fault diagnosis observer (GFDO) and an active fault tolerant control system (AFTCS) for external disturbances based on an aircraft control system and actuator faults. Unlike the traditional approach that assumes external disturbances are norm bounded, the Gronwall Lemma based on the external disturbances constraint condition is modelled to satisfy the system stability. Then, the GFDO is designed by two performance indices defined to simultaneously estimate system states and faults. In addition, the AFTCS is designed to obtain the desired performances in the fault case. When the fault is diagnosed by GFDO, the regular controller switches to AFTCS. Finally, an analysis of the performance of the proposed algorithm is discussed based on simulations of the F-18 aircraft control system, which illustrates the effectiveness and applicability of this method.
Citation: Rong Sun, Yuntao Han, Yingying Wang. Design of generalized fault diagnosis observer and active adaptive fault tolerant controller for aircraft control system[J]. Mathematical Biosciences and Engineering, 2022, 19(6): 5591-5609. doi: 10.3934/mbe.2022262
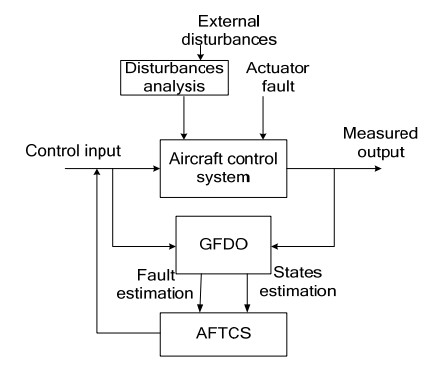
This study aims to design a generalized fault diagnosis observer (GFDO) and an active fault tolerant control system (AFTCS) for external disturbances based on an aircraft control system and actuator faults. Unlike the traditional approach that assumes external disturbances are norm bounded, the Gronwall Lemma based on the external disturbances constraint condition is modelled to satisfy the system stability. Then, the GFDO is designed by two performance indices defined to simultaneously estimate system states and faults. In addition, the AFTCS is designed to obtain the desired performances in the fault case. When the fault is diagnosed by GFDO, the regular controller switches to AFTCS. Finally, an analysis of the performance of the proposed algorithm is discussed based on simulations of the F-18 aircraft control system, which illustrates the effectiveness and applicability of this method.

| [1] |
Y. Shen, X. Bing, S. X. Ding, D. Zhou, A review on recent development of spacecraft attitude fault tolerant control system, IEEE Trans. Ind. Electron., 63 (2016), 3311–3320. https://doi.org/10.3390/electronics9091513 doi: 10.3390/electronics9091513

|
| [2] |
J. H. Fan, Z. Q. Zheng, Y. M. Zhang, Robust fault-tolerant control against time-varying actuator faults and saturation, IET Control Theory A., 6 (2012), 2198–2208. https://doi.org/10.1049/iet-cta.2011.0713 doi: 10.1049/iet-cta.2011.0713
|
| [3] |
A. Abbaspour, S. Mokhtari, A. Sargolzaei, K. K. Yen, A survey on active fault-tolerant control systems, Electronics-Switz, 9 (2020), 1513. https://doi.org/10.3390/electronics9091513 doi: 10.3390/electronics9091513
|
| [4] | M. Blanke, M. Staroswiecki, N. E. Wu, Concepts and methods in fault-tolerant control, in Proceedings of the 2001 American control conference, 2001. https://doi.org/10.1109/ACC.2001.946264 |
| [5] |
T. V. Costa, R. R. Sencio, L. C. Oliveira-Lopes, F. V. Silva, Fault-tolerant control by means of moving horizon virtual actuators: Concepts and experimental investigation, Control Eng. Pract., 107 (2021), 104683. https://doi.org/10.1016/j.conengprac.2020.104683 doi: 10.1016/j.conengprac.2020.104683
|
| [6] | P. Li, X. Yu, J. Ma, Z. Zheng, Fault-tolerant flight control for an air-breathing hypersonic vehicle using multivariable sliding mode and neural network, in 2017 IEEE 36th Chinese Control Conference (CCC), 2017. https://doi.org/10.23919/ChiCC.2017.8028500 |
| [7] |
Z. Mao, B. Jiang, P. Shi, Fault-tolerant control for a class of nonlinear sampled-data systems via a Euler approximate observer, Automatica., 46 (2010), 1852–1859. https://doi.org/10.1016/j.automatica.2010.06.052 doi: 10.1016/j.automatica.2010.06.052
|
| [8] |
P. H. V. Rezende, R. R. Sencio, T. V. Costa, Fault-tolerant control and interval operability for non-square faulty systems, Braz. J. Chem. Eng., 38 (2021), 763–775. https://doi.org/10.1007/s43153-021-00149-8 doi: 10.1007/s43153-021-00149-8
|
| [9] | T. Çimen, M. U. Salamci, Flight dynamics, simulation and control with matlab and simulink, in Workshop at the 20th World Congress of the International Federation of Automatic Control (IFAC WC), 2017. |
| [10] |
M. J. Khosrowjerdi, R. Nikoukhah, N. Safari-Shad, A mixed H2/H∞ approach to simultaneous fault detection and control, Automatica, 40 (2004), 261–267. https://doi.org/10.1016/j.automatica.2003.09.011 doi: 10.1016/j.automatica.2003.09.011
|
| [11] |
W. Guan, G. Yang, Adaptive fault-tolerant control of linear systems with actuator saturation and L 2-disturbances, J. Control Theory. Appl., 7 (2009), 119–126. https://doi.org/10.1007/s11768-009-8009-2 doi: 10.1007/s11768-009-8009-2
|
| [12] |
Q. Hu, Robust adaptive sliding-mode fault-tolerant control with L2-gain performance for flexible spacecraft using redundant reaction wheels, IET Control Theory A., 4 (2010), 1055–1070. https://doi.org/10.1049/iet-cta.2009.0140 doi: 10.1049/iet-cta.2009.0140
|
| [13] |
P. A. Luppi, L. Braccia, M. Patrone, D. Zumoffen, Control allocation based fault-tolerant strategy for a bio-ethanol processor system integrated to a PEM fuel cell, J. Process. Contr., 81 (2019), 40–53. https://doi.org/10.1016/j.jprocont.2019.05.021 doi: 10.1016/j.jprocont.2019.05.021
|
| [14] |
L. F. Mendonça, J. Sousa, J. S. D. Costa, Fault tolerant control using a fuzzy predictive approach, Expert Syst. Appl., 39 (2012), 10630–10638. https://doi.org/10.1016/j.eswa.2012.02.094 doi: 10.1016/j.eswa.2012.02.094
|
| [15] | J. Wang, J. Zhang, Active fault-tolerant control research of multi-agent system, in Journal of Physics: Conference Series, 2021. https://doi.org/10.1088/1742-6596/1754/1/012088 |
| [16] |
Z Wang, H Xue, Y Pan, H Liang, Adaptive neural networks event-triggered fault-tolerant consensus control for a class of nonlinear multi-agent systems, Aims Math., 5 (2020), 2780–2800. https://doi.org/10.3934/math.2020179 doi: 10.3934/math.2020179
|
| [17] |
H. Hu, B. Wang, Z. Cheng, L. Liu, Y. Wang, X. Luo, A novel active fault-tolerant control for spacecrafts with full state constraints and input saturation, Aerosp. Sci. Technol., 108 (2021), 106368. https://doi.org/10.1016/j.ast.2020.106368 doi: 10.1016/j.ast.2020.106368
|
| [18] |
R. Escobar, C. Astorga-Zaragoza, A. Téllez-Anguiano, D. Juárez-Romero, J. Hernández, G. Guerrero-Ramírez, Sensor fault detection and isolation via high-gain observers: Application to a double-pipe heat exchanger, ISA T., 50 (2011), 480–486. https://doi.org/10.1016/j.isatra.2011.03.002 doi: 10.1016/j.isatra.2011.03.002
|
| [19] | J. Stephan, W. Fichter, Gain-scheduled multivariable flight control under uncertain trim conditions, in 2018 AIAA Guidance, Navigation, and Control Conference, (2018), 1130. https://doi.org/10.2514/6.2018-1130 |
| [20] |
J. Xu, K. Y. Lum, A. P. Loh, A gain-varying UIO approach with adaptive threshold for FDI of nonlinear F16 systems, J. Control Theory Appl., 8 (2010), 317–325. https://doi.org/10.1007/s11768-010-0021-z doi: 10.1007/s11768-010-0021-z
|
| [21] |
R. J. Adams, J. M. Buffington, A. G. Sparks, S. S. Banda, Robust multivariable flight control, Springer Sci. Bus. Media., 2012. https://doi.org/10.1007/978-1-4471-2111-4 doi: 10.1007/978-1-4471-2111-4
|
| [22] |
M. Benosman, K. Y. Lum, Application of absolute stability theory to robust control against loss of actuator effectiveness, IET Control Theory A., 3 (2009), 772–788. https://doi.org/10.1049/iet-cta.2008.0216 doi: 10.1049/iet-cta.2008.0216
|
| [23] | S. Panza, M. Lovera, Rotor state feedback in helicopter flight control: robustness and fault tolerance, in 2014 IEEE Conference on Control Applications (CCA), (2014), 451–456. https://doi.org/10.1109/CCA.2014.6981387 |
| [24] |
H. Li, H-infinity bipartite consensus of multi-agent systems with external disturbance and probabilistic actuator faults in signed networks, AIMS Math., 7 (2022), 2019–2043. https://doi.org/10.3934/math.2022116 doi: 10.3934/math.2022116
|
| [25] |
P. Yang, Z. Liu, D. Li, Z. Zhang, Z. Wang, Sliding mode predictive active fault-tolerant control method for discrete multi-faults system, Int. J. Control Autom., 19 (2021), 1228–1240. https://doi.org/10.1007/s12555-020-0046-0 doi: 10.1007/s12555-020-0046-0
|
| [26] |
W. Chen, M. Saif, A sliding mode observer-based strategy for fault detection, isolation, and estimation in a class of Lipschitz nonlinear systems, Int. J. Syst. Sci., 38 (2007), 943–955. https://doi.org/10.1080/00207720701631503 doi: 10.1080/00207720701631503
|
| [27] |
Y. Zhang, Actuator fault-tolerant control for discrete systems with strong uncertainties, Comput. Chem. Eng., 33 (2009), 1870–1878. https://doi.org/10.1016/j.compchemeng.2009.04.004 doi: 10.1016/j.compchemeng.2009.04.004
|
| [28] |
P. Li, J. Ma, Z. Zheng, Robust adaptive multivariable higher-order sliding mode flight control for air-breathing hypersonic vehicle with actuator failures, Int. J. Adv. Robot. Syst., 13 (2016), 1–12. https://doi.org/10.1177/1729881416663376 doi: 10.1177/1729881416663376
|
| [29] |
Y. Ding, Y. Wang, S. Jiang, B. Chen, Active fault-tolerant control scheme of aerial manipulators with actuator faults, J. Cent. South Univ., 28 (2021), 771–783. https://doi.org/10.1007/s11771-021-4644-7 doi: 10.1007/s11771-021-4644-7
|
| [30] |
X. Zhang, L. Liu, Y. Liu, Adaptive NN control based on Butterworth low-pass filter for quarter active suspension systems with actuator failure, AIMS Math., 6 (2021), 754–771. https://doi.org/10.3934/math.2021046 doi: 10.3934/math.2021046
|
| [31] |
F. Zhu, F. Cen, Full-order observer-based actuator fault detection and reduced-order observer-based fault reconstruction for a class of uncertain nonlinear systems, J. Process. Contr., 20 (2010), 1141–1149. https://doi.org/10.1016/j.jprocont.2010.06.021 doi: 10.1016/j.jprocont.2010.06.021
|
| [32] |
D. Fragkoulis, G. Roux, B. Dahhou, Detection, isolation and identification of multiple actuator and sensor faults in nonlinear dynamic systems: Application to a waste water treatment process, Appl. Math. Model., 35 (2011), 522–543. https://doi.org/10.1016/j.apm.2010.07.019 doi: 10.1016/j.apm.2010.07.019
|
| [33] |
D. Belkhiat, N. Messai, N. Manamanni, Design of a robust fault detection based observer for linear switched systems with external disturbances, Nonlinear Anal. Hybri., 5 (2011), 206–219. https://doi.org/10.1016/j.nahs.2010.10.009 doi: 10.1016/j.nahs.2010.10.009
|
| [34] |
M. Khosrowjerdi, Mixed H2/H∞ approach to fault-tolerant controller design for Lipschitz non-linear systems, IET Control Theory A., 5 (2011), 299–307. https://doi.org/10.1049/iet-cta.2009.0556 doi: 10.1049/iet-cta.2009.0556
|
| [35] |
C. Z. Ming-Yue, H. P. Liu, Z. J. Li, D. H. Sun, Fault tolerant control for networked control systems with access constraints, Acta Autom. Sinica., 38 (2012), 1119–1126. https://doi.org/10.1016/S1874-1029(11)60286-3 doi: 10.1016/S1874-1029(11)60286-3
|









Figures(10) / Tables(2)

Rong Sun, Yuntao Han, Yingying Wang. Design of generalized fault diagnosis observer and active adaptive fault tolerant controller for aircraft control system[J]. Mathematical Biosciences and Engineering, 2022, 19(6): 5591-5609. doi: 10.3934/mbe.2022262







 DownLoad:
DownLoad: